Изобретение относится к оборудованию для автоматической сварки, а именно к следящим системам автоматического направления электрода по стыку, и может быть использовано; при сварке изделий с небольшой кривизной, таких как прямошовные и спиральношовные трубы, полотнища, карты, рулоны и др.
Следящая система автоматического направления электрода по стыку, как правило, содерхсит датчик, преобразователь сигнала датчика, регулятор и корректирующий привод.
В процессе работы датчик преобразует механические перемещения стыка или его аналога в электрический сигнал, а на выходе нормирующего преобразователя вырабатывается сигнал рассогласования, соответствующий эцрму перемещению. В регуляторе сигнал рассогласования преобразуется в сигнал обработки в соответствии с выбранным. Законом регулирования. Сигнал обработки поступает на корректирукяций привод.
Известно устройство для регулирования полог.ения электрода относитель-но сварного шва, в котором корректирующий привод следящей системь, при
возникновении возмущающего воздействия, вызванного технологическими прихватками, отключается путем снижения до нуля коэффициента усиления систе,мы во время прохохэдения датчика рассогласования над прихваткой. Для этого оно снабжено реле, которое срабатывает при увеличении сигнала датчика сверх установленной величины, и от10ключающим усилителем 1.
Недостатком этого устройства является то, что отключение системы при поломках самой системы мохсет произойти либо с опозданием только при 15достихсении порога срабатывания реле, либо вообще не произойти. -В обоих случаях произойдет смещение электрода со стыка на значительную величину, и свариваемое изделие будет бракован20ным.
Известно также устройство для слежения за стыком, содержащее регулятор с датчиком, жестко связанным со сварочной головкой, регулируемые уста25новки и проме жуточные усилители с фазочувствительными выпрямителями в каждом из каналов, сумматор; усилитель мощности, исполнительный привод, дополнительные быстродействующие при30воды настройки уставки, при этом
на входе сумматора установлен логический блок И-ИЛИ с пороговым комму татором, пвреключанхдим выходы фазочувствительных выпрямителей на якорные цепи двигателей дополнительных приводов.,5
Если сигнал рассогласования дости-. ае уровня насыщения усилителя, то рабатывает пороговый коммутатор и оммутирует выводы.фазочувствительных выпрямителей на якорные цепи вспо-Ю огательных двигателей/ которые че-. ез редукторы воздействуют на пЬтенцйометры.уставки датчиков. :
В. результате работы двигателей . уровень возмущения уменьшается, сиг- 5 нал рассогласования снижается ниже порогового ypoBjJH-, и коммутатор переключает фаз-очувствительные выпрямители на сумматор, выход которого че- рез усилитель мощности, исполнитель- 2Q ный двигатель ..и редуктор воздействуем на сварочную головку 2. .
Недостатки известного устройства следующие. Пороговый коммутатор может контролировать работу устройства jc только для таких поломок, когда сигнал рассогласования достигает уровня насыщения усилителя. Все другие воз-: можные .поломки пороговый коммутатор не определяет. Кроме того,.устройство продолжает работать при достижеНИИ уровня насыщения усилителя, что может привести к большому смещению электродов, а следовательно, к бра- ...- 35
Делью изобретения является повышение надежности системы за счетавтоматизации выявления ее неисправности. . .
Поставленная цель достигается тем,40 что следящая система автоматического направления электрода по стыку свариваемых деталей, содерлсащая последовательно соединенные датчик, преобразователь сигнала.датчика, регуля- 45 тор, привод коррекции, а также подключенное к выходу преобразозвателя сигнала датчика пороговое устройство, дополнительно снабжена дифференциатором, формирователем, двумя схе- сд мами И, двумя схемами НЕ и схемой ИЛИ, при этом вход дифференциатора связан с выходом регулятора, а выход через первую схему НЕ соединен с первым входом первой схемыИ, вход формирователя связан с выходом преобразователя сигнала датчика, а выход соединен с вторым входом второй схемы И и через вторую схему НЕ с первым входом второй схемы И, второй вход которой связан с выходом порого-60 вого устройства, причем выходы обеих схем И связань с входами схемы ИЛИ.
При этом дифференциатор состоит из дифференцирующего звена, инвертора и схемы ИЛИ, входы которой подклю-65
чены к выходам дифференцирующего звена и инвертора.
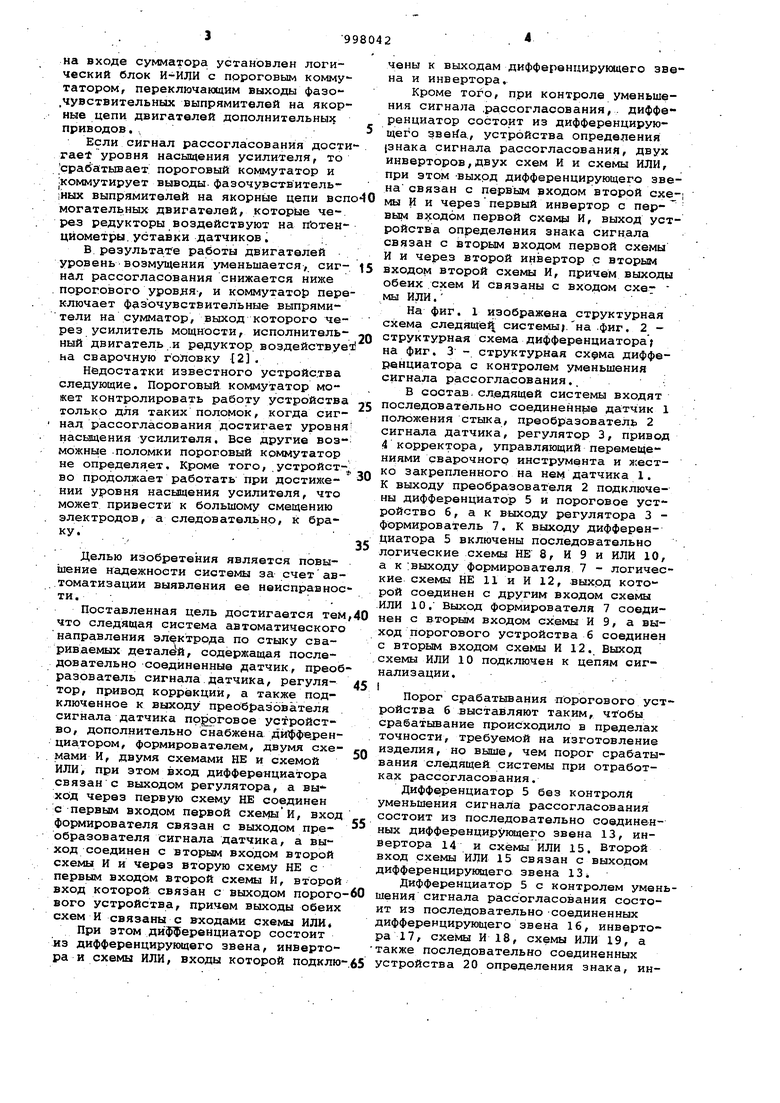
Кроме того, при контроле уменьшения сигнала .рассогласования,. дифференциатор состоит из дифференцирующег о SBerfa, устройства определения (Знака сигнала рассогласования, двух инверторов,двух схем И и схемы ИЛИ, при этом -выход дифференцирующего звена связан с первым входом второй cxe мы И и через первый инвертор с пер- вым входом первой схемы И, выход устройства определения знака сигнала связан с вторым входом первой схемы И и через второй инвертор с вторым входом второй схемы И, причем выходы обеих схем И связаны с входом схе- мы или..
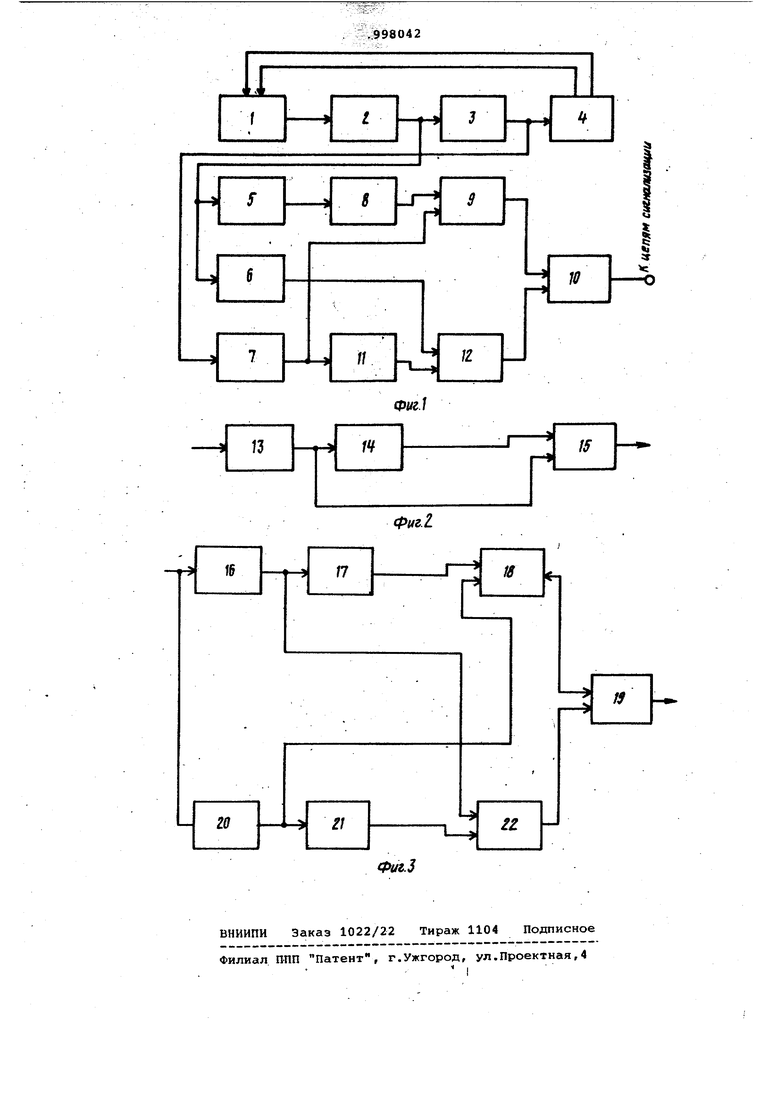
На фиг. 1 изображена структурная схема следяще системы).на .фиг. 2 - структурная схема дифференциатора на фиг. 3 -. структурная схема дифференциатора с контролем уменьшения сигнала рассогласования.. :
В состав, следящей системы входят последовательно соединенные датчик 1 положения стыка, преобразователь 2 сигнала датчика, регулятор 3, привод 4 корректора, управляющий перемещениями сварочного инструмента и жестко закрепленного на нем датчика 1. К выходу преобразователя 2 подключены дифференциатор 5 и пороговое устройство 6, а к выходу регулятора 3 формирователь 7. К выходу дифференциатора 5 включены последовательно логические схемы НЕ 8, И 9 и ИЛИ 10, а к :выходу формирователя 7 - логические схемы НЕ 11 и И 12, -выход которой соединен с другим входом схемы .ИЛИ 10. Выход формирователя 7 соединен с вторым входом схемы И 9, а выход порогового устройства б соединен с вторым входом схемы И 12. Выход .схемы ИЛИ 10 подключен к цепям сигнализации.
I . .
Порог срабатывания порогового устройства 6 .выставляют таким, чтобы срабатывание происходило в пределах точности, требуемой на изготовление изделия, но выше, чем порог срабатывания следящей системы при отработках рассогласования.
Дифференциатор 5 без контроля уменьшения сигнала рассогласования состоит из последовательно соедине-нных дифференцирующего звена 13, инвертора 14 и схемы ИЛИ 15. Второй вход схемы ИЛИ 15 связан с выходом дифференцирующего звена 13.
Дифференциатор 5 с контролем уменшения сигнала рассогласования состоит из последовательно -соединенных дифференцирующего звена 16, инвертора 17, схемы И 18, схемы ИЛИ 19, а также последовательно соединенных устройства 20 определения знака, инвертора 21 и схемы И 22, выход которой соединен с ApytHM входом схема ИЛИ 19, Выходы дифференцирующего зве на 18 и устройства 20 определения знака объединены. Выход дифференциру ющего звена 16 подсоединен к входу схемы И 22, а вьйсод устройства 20 определения знака подсоединен к второму входу схемы И 18. Устройство 20 определения знака представляет со бой пороговое устройство с двумя уро нями выходного сигнала: положительным, когда входной сигнал имеет положительную полярность, и отрицатель ным, когда входной, сигнал имеет отрицательную полярность. При этом сиг нал положительной полярности соответ ствует логической единице, а сигнал отрицательной полярности - логич скому нулю. . Выход схемы ИЛИ 15, либо схемы ИЛИ 19, в зависимости от того, какого вида дифференциатор используете, только для контроля изменения сигнала или для контроля уменьшения сигнала, соответственно подключается к входу сх-емы НВ 8. Выход схемы ИЛИ 10 может использоваться для сигнализации состояния устройств системы слежения. . . Следящая система работает следующим образом,г При смещении датчика 1 со стыка или физического аналога стыка преобразователь. 2 вырабатыва1ет сигнал рас согласования постоянного тока, ампли туда и полярность которого определиют величину и направление смещения. Этот сигнал подается на регулятор 3, который вырабатывает сигнал управления для привода 4 корректора в направлении уменьшения сигнала рассогласования. При этом сварочный инстру мент и жестко закрепленный на нем датчик 1 совмещается со стыком. Для осуществления слежения скорость корректировочного перемещения поперек стык а должна быть больше, чем максимально возможная скорость отклонения стыка. Поэтому при рабйте дзвигателя корректирующего привода скорость йзме нения (уменьшения) сигнала рассогласования значительно больше, чем .. скорость изменения во время, когда двигатель не включен. Дифференциатор 5 настроен так, что при работе двига теля на его выходе появляется импульс напряжения , а когда двигатель 1ртключен,и скорость изменения сигнаJia рассоглавования мала и определяется только кривизной стыка или направ ляющих для перемещения сварочногб аппарата-, на выходе дифференциатора 5 импульс напряжения отсутствует. При правильной работе следящей сис темы, когда отсутствует сигнал отработки на выходе регулятора 3, на вход схемы И 9 с выхода формирователя 7 сигнал не поступает, а на вход схемы И 12 не поступает сигнал с выхода порогового устройсява 6. При этом на выходе схемы ИЛИ.10 также отсутств5 ет сигнал об отказе в рабо- те. Когда же на выходе регулятора 3 появляется сигнал отработки и на выходе формирователя 7 появляется сигнал единищ, начинается отработка двигателемпривода 4 корректора появившегося рассогласования. При этом уменьшается сигнал рассогласования на выходе преобразователя 2, а на выходе дифференциатора 5 появляетсл сигнал логической единицы. Он инвер- ч тируется схемой НЕ 8 и поступает на второй вход схемы И 9 сигналом логическ.ого нуля. Следовательно, при правильном функционировании следящей системы на выг ходе схемы ИЛИ 10 отсутствует сигнал об отказе в работе следящей системы. В случае, когда на выходе регулятора 3 в результате его полОмки от:сутствуют сигналы отработки, на вход формирователя 7 сигнал не поступает, а на выход схемь И 12/ соединенной с выходом схемы НЕ 11, поступает сиг-, нал высокого уровня - логическая единица. Если в. результате смещения датчика со стька сигнал рассогласования на выкоде преобразователя 2 превысит порог срабатывания порогового устройства б, то на второй вход схемы. И 12 тоже поступает сигнал единицы, который -передается ерез схему ИЛИ 10 на цепи, сигнализации. При этом оператор переходит на ручное управление корректором. . : В случае, когда на вход регулятора 3 поступает, сигнал рассогласования, и на его выходе появляется. х игнал отработки, а в результате поломки датчика 1, преобразователя 2 или корректирующего привода 4 сигнал рассогласования не уменьшается, на выходе дифференциатора 5 сигнал отсутствует, и на вход схемы И 9 через схему НЕ 8 будет непрерывно подава ться сигнал едини1Щ. На выходе формирователя 7 также бУДет вырабатываться сигнал единищл при каждом включении регулятора 3, /который подается на второй вход схемы И 9, В атом случае с выхода схемы И 9 на вход схемы ИЛИ :10 поступит сигнал об отказе работе следящей системы, и оператор переходит на ручное управление. Формирование на выходе дифференциатора 5 импульсов одной полярности при различных по знаку произвсяных по времени от сигн.ала рассогласования при отработках привода 4 корректора производится следующим образом. ,При включении исполнительного двигателя корректора уменьшается сйгнал рассогласования, и на выходе дифференцирующего звена 13 образуется импульс напряжения, полярность которого определяется направлением отработки. Импульсы.одной полярности через инвертор 14 и противоположной полярности непосредственно поступают, на входы схемы ИЛИ 15. Таким.образом на выходе схемы ИЛИ 15 всегда появляется сигнал логической единицы, когда включается исполнительный двигатель привода 4 корректора.
Рассмотрим схему дифференциатора 5 с контролем уменьшения сигнала рассогласования.
Когда входной сигнал рассогласования имеет положительную полярность, сигнал логической единицы подается на один из входов схемы И 18, а на вход схемы И 22 подается логический ноль. При включении исполнительного двигателя происходит уменьшение вход ного сигнала рассогласования, и на выходе дифференцирующего звена 16 появляются отрицательные импульсы напряжения, соответствующие потенциалу логического нуля. Они инвертируются инвертором 17 и поступают на другой вход схемы И 18 которая открывается- и передает импульс на схему ИЛИ 22. ПРИ этом на выходе схемы
ИЛИ 22 появляются импульсы ЛОГИЧеСкой единицы.
Когда входной сигнал рассогласования имеет отрицательную полярность, отрицател11ный потенциал на выходе устройства 20 определения знака инвертируется инвертором 21 в положительный соответствующий ло гической единице и поступает на вход схемы И 22.
При нормальной работе системы сиг нал рассогласования по абсолютной величине уменьшается, и на выходе дифференцирующего звена 16 образуются импульсы положительной полярности соответствующие логической единице, которые поступают на другой вход схемы И 22 и отпирают ее. При этом на выходе схемы ИЛИ 19 формируется сигнал логической единицы.
Если в результате какой-либо поломки сигнал рассогласования на входе дифференциатора не уменьшается, то на выходе дифференцирующего звена- 16 не будут появляться импульсы отрицательной полярности, и обе схемы И 18 и 22 будут закрыты. На выходе схемы ИЛИ 19 также, будет отсутствовать сигнал логической единицы.
Таким образом, в предложенной следящей системе автоматически контролируется правильность функционирования системы, и в случае отказа в работе в системе автоматически вырабатывается сигнал об этом отказе. При этом оператору не требуется визуально контролировать точность рабо
ты следящей системы,и он может больш внимс1ния уделить выполнению других технологических операций.
Изобретение повышает надежность работы следящей системы, облегчает ее обслуживание, и тем самым повышает качество сварных соединений. Формула изобретения
1. Следящая система автоматического направления электрода по стыку свариваемых деталей,содержащая после довательно соединенные датчик,преоб разователь сигнала датчика,регулятор привод корректора, а также подключенное к выходу преобразователя сигнала датчика пороговое устройство, отличающаяся тем, что, с целью повышения надежности за счет автматизации выявления неисправности, система дополнительно снабжена дифференциатором, формирователем, двумя схемами И, двумя схемами НЕ и схемой ИЛИ, при этом вход дифференциатора связан с выходом регулятора, а выход через первую схему НЕ соединен с первым входом первой схемыИ, вход формирователя связан с выходом преобразователя сигнала датчика, а выход соединен с вторым входом второй схемы И и через вторую схему НЕ - с первым входом второй схемы И, второй вход последней связан с выходом порогового устройства, причем выходы обеих схем И связаны с входами схемы ИЛИ.
2 . Следящая система по п. 1, о тл и. чающаяся тем, что дифференциатор состоит из инвертора, схемы ИЛИ и дифференцирующего звена, причем входы схемы ИЛИ подключены к выходам дифференцирующего звена и инвертора.
3. Следящая система по п, 1, о тли-чающа яс я тем, что, с целью контроля уменьшения сигнала рассогласования, дифференциатор выполнен из дифференцирующего звена, устройства определения знака сигнала рассоглг сования, двух инверторов, двух схем И и схемы ИЛИ, при этом выход дифференцирующего звена связан с первый входом второй схемы И и через первый инвертор - с первым входом первой схемы И, выход устройства определения знака сигнала связан с вторым входом первой схемы И и через второй инвертор - с вторым входом второй схемы И, причем выходы обеих схем И связаны с входом схемы ИЛИ.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 141233, кл. В 23 К 9/10, 1961.
2.Авторское свидетельство СССР № 411971, кл. В 23 К 9/10, 22.11,7 (прототип).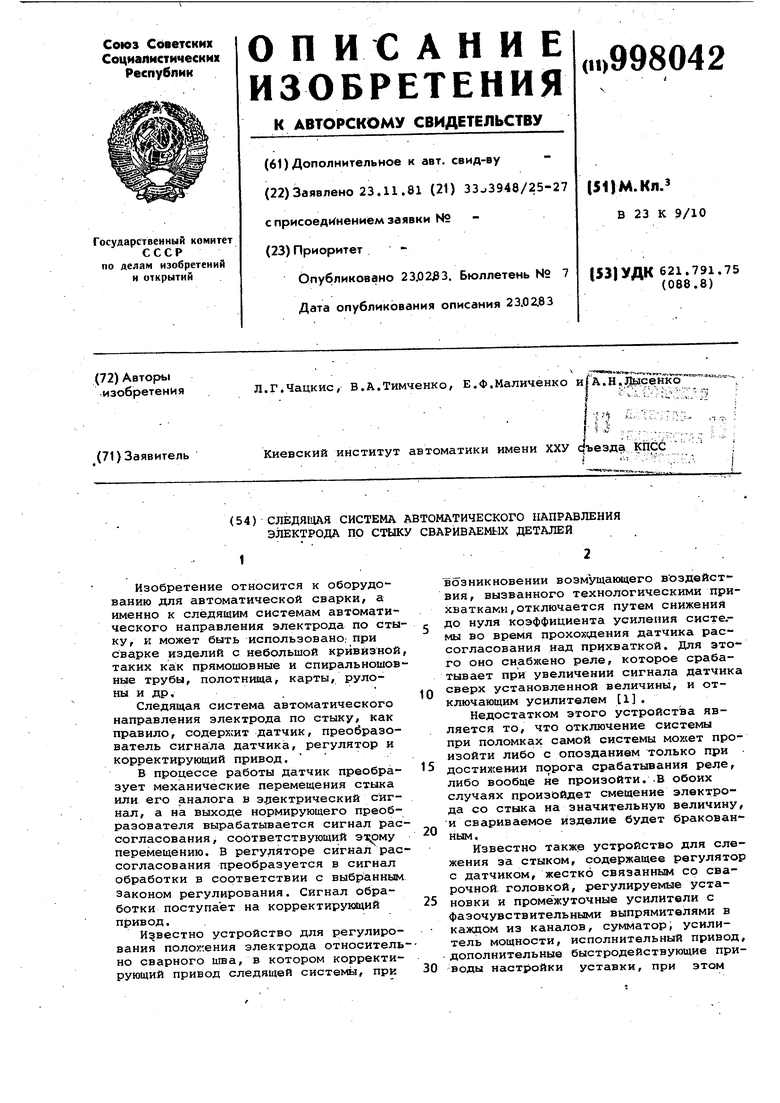
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| Дфухканальная следящая система | 1980 |
|
SU954923A2 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Система автоматического управления скоростью вращения ротора турбины | 1980 |
|
SU866247A2 |
| Устройство автоматического управления приводами механизмов стана холодной прокатки труб | 1984 |
|
SU1210930A1 |
| Следящая система | 1972 |
|
SU447681A1 |
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2008 |
|
RU2392730C1 |