Изобретение относится к автоматик е.
Известно устройство для автоматического регулирования толщины слоя грунта, содержащее вспомогательное колесо, связанное с дифференциальным редуктором, второй вход которого соединен с приводом ведущей звездочки, а на выходном валу дифференциального редуктора укреплен центробежный редуктор, соединенный подвижной муфтой через рычаг с буксой золотникового распределителя, связанного с силовым цилиндром, льиси, осуществляющей выглубление отвала {.
Недостатком указанного механического устройства для автоматического регулирования положения рабочего оргаиа машины является его сложность и недостаточная точность выдерживания заданного параметра.
Наиболее близким техническим решением к предлагаемому является устройство для автоматического управления угловым положением рабочего органа машины, содержащее датчик угла соединенный с источником питания, и исполнительный блок. Чувствительным элементом датчика угла является маятник, связанный кинематически с потенциометром,а преобразующим блокоммостовая схема.
При отклонении, рабочего органа машины на угол, больший допустимого сигнал с чувствительного элемента и преобразующего блока датчика угла включает исполнительный блок, запускающий гидропривод машины, который воздействует на рабочий орган и возвращает его в заданное положение. При этом в известном устройстве исполнительный ёлок остается включенным постоянно до тех пор, пока с датчика угла не поступит сигнал о том, что рабочий орган вошел в пределы заданных допусков угловогд положения 2 .
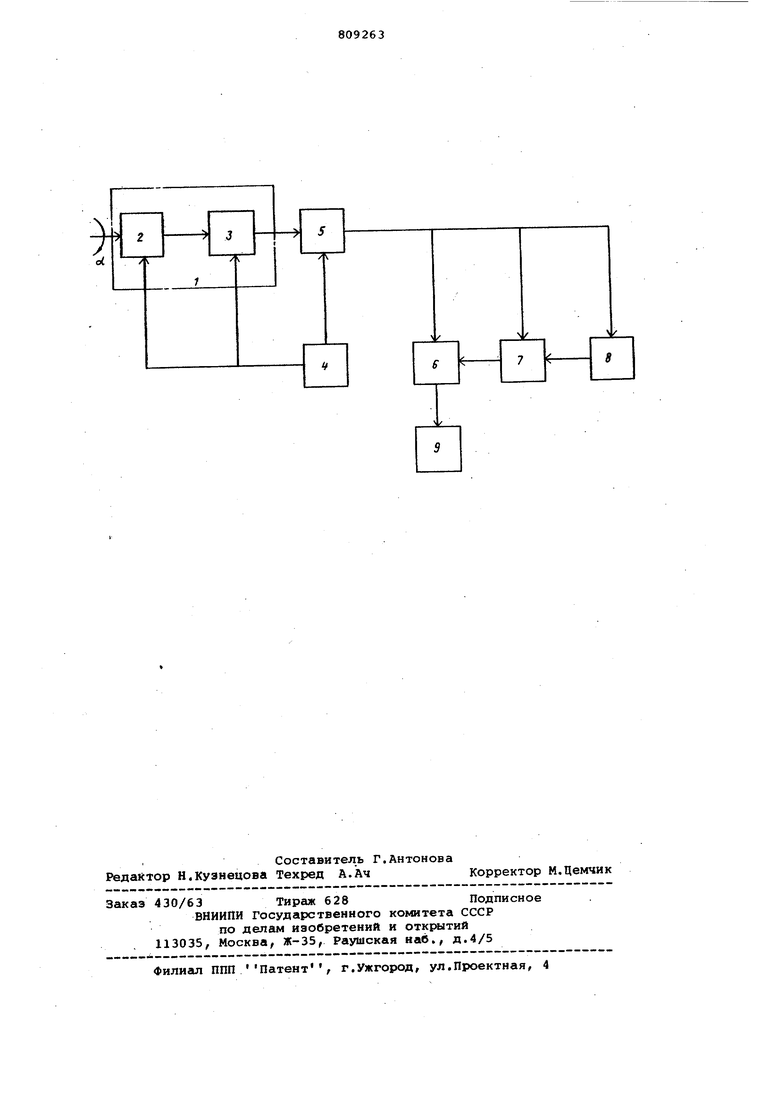
Недостатком известного устройства является то, что вследствие иесовершенства гидравлических приводов и значительной .массы рабочих органов машин, Ьбладаихцих большой инерционностью, и вследствие влияния динамических факторов, характерных для специфических условийэксплуатации дорожных машин, в устройстве возни.кают непрерывные автоколебания рабочего органа, что снижает точность отработки устройством заданного параметра и соответственно снижает производительность дорожных машин, В результате, при использовании на легких и средних автогрейдерах,у которых при производстве строительных работ допуски на угловое отклонение рабочего органа задаются с высокой точностью (в пределах сСддп ° 0°45 ), известное устрой ство не обеспечивает требуемой точности работы. Цель изобретения - повышение точ ности устройства при выдерживании заданного угла наклона рабочего органа мамины. Поставленная цель достигается тем, что в устройство введены ключ, формирователь длительности импульсо источник экспоненциального напряжения и коммутатор режима работы, выход источника питания подключен к первому входу ключа, второй вход ко торого соединен с выходом датчика угла, а выход соединен с входами фо мирователя длительности импульсов, коммутатора режима работы и источни ка экспоненциального напряжения, выход коммутатора режима работы сое динен с другим входом источника экс поненциального напряжения, выход ко торого подключен к другому входу формирователя длительности импульсо выход которого соединен с входом исполнительного блока. На чертеже приведена блок-cxelysa устройства. Устройство содержит датчик 1 угл чувствительный элемент 2, преобразу ющий блок 3 датчика угла, источник питания, ключ 5, формирователь 6 длительности импульсов, источник 7 экспоненциального напряжения, комму татор 8 режима работы, исполнительный блок 9. В качестве чувствительного элеме та 2 датчика 1 угла может использоваться, например маятник, корпус ко торого установлен на рабочем органе машины. Преобразующий блок 3 выполн ется, например в виде фотоэлектричес ких преобразователей, состоящих из светоизлучателей и фотрприемников, попарно расположенных по обе стороны от подвижной диафрагмы, кинематически связанной с маятником. Положение преобразователей относительно диафрагмы определяется предельно допустимым углом отклонения обдоп- При отклонении на угол о в какуюлибо сторону, подвижная диафрагма прерывает световой noTpjc преобразователя и на выходе датчика угла появляется сигнал , Устройство работает следующим образом. При отклонении по каким-либо причинам рабочего органа машины во время ее работы на угол об , болыиий допустимого угла С.АОП на выходе датчика 1 угла скачкоМ появляется напряжение, которое поступает на управляющий вход ключа 5. Ключ 5 заг ыкается и подает питание на остальные блоки устройства. Формирователь 6 начинает вырабатывать импульсы, а источник 7 начинает вырабатывать экспоненциально изменяющееся напряжение, которое поступает на управляющий вход формирователя- 6. Под действием этого напряжения формирователь 6 формирует импульсы, длительность которых изменяется по экспоненциальному закону. Эти импульсы включают на различное время исполнительный блок 9, который запускает на время длительности импульсов гидропривод машины (на чертеже не показан), возвращающий рабочий орган машины в заданное положение . Если рабочий орган отклонился на значительный угол, так что за время действия одного импульса с учетом инерционности системы гидропривод - рабочий орган он не возвратился в исходное состояние, формирователь 6 вырабатывает следующий импульс и т.д. до т-ех пор, пока рабочий орган не войдет в пределы заданных угловых допусков. В этот момент сигнал с датчика 1 разомкнет ключ 5 и отключит блоки 6-8 от источника питания. Подключение блоков 6-8 к источнику питания через ключ 5 обеспечивает появление экспоненциального напряжения от источника 7 в любой момент начала коррекции, а также прекращение импульсов и быстрый сброс напряжения с зарядных цепей источника 7 при окончании коррекции для того, чтобы при следующем отклонении рабочего органа коррекция начиналась всегда с одного и того же исходного состояния блоков 6-8. Устройство работает в двух режимах. Если профиль полотна грунта предварительно не обработан, то есть достаточно грубый и отклонения рабочего органа от заданного угла происходят чаще всего на значительную величину, оператор с помощью ком мутатора 8 режима работы устанавливает такое положение цепей в источнике 7 экспоненциального напряжения,при котором источник 7 при срабатывании ключа 5 начинает выраба- тывать напряжение, уменьшаквдеёся по экспоненте от максимального значения до нуля. В этом случае первый импульс будет иметь наибольшую длительность и соответственно гидроприводы произведут наибольшее воздействие на рабочий орган, возвращая его в заданное положение. Если после первого импульса рабочий орган еще не достиг заданного положения, формирователь 6 выработает второй импульс меньшей длительности, который произведет повторную, но более точную коррекцию и так далее с постепенно уменьшающейся длительностью импульсов до возвращения рабочего органа машины в заданное положение. Такой режим работы позволяет корректировать положение рабочего органа с наибольшим быстродействием и без автоколебаний. Если профиль обрабатывгиощего полотна достаточно ровный и отклонения рабочего органа от заданного угла происходит чаще всего на небольшую величину, предлагаемый выше режим работы устройства не может быть использован, так как это приводит к частой перекоррекции и к возникновению непрерывных автоколебаний систеки. В этом случае оператор с помощью коммутаторов 8 устанавливает .такое положение цепей источника 7 экспонен циального напряжения, при котором ис точник 7 начинает вырабатывать напряжение, увеличивающееся по экспоненте от нуля до максимального значения, а формирователь б соответственно вырабатывает импульсы.с возрас тающей длительностью. При этом первы импульс произведет точную коррекцию и если рабочий орган после этого не возвратился в заданное положение,то следующий импульс .будет иметь большу длительность. Если по каким-либо при чинам отклонение рабочего органа произойдет на значительную величину и после первой или второй коррекции он не возвратится в. заданное положе ние, следующие импульсы начнут вклю чать гидропривод на большее время вплоть до включения гидропривода на постоянное срабатывание. Как показали статистические иссл дования движения рабочего органа пр профилировании грунтов различной сложности, именно такие режимы рабо ты с увеличивающейся длительностью импульсов при работе на сложном про филе грунта, обеспечивают наиболее быстрое возвращение рабочего органа в заданное положение без автоколебаний и соответственно позволяет повысить скорость движения машины и точность ее работы. Принципиальная схема устройства проста и надежна в работе. Заводские испытания показали, что пpeдлaгae lюe устройство обеспечивает устойчивую коррекцию (без автоколебаний) углового положения рабочего органа машины в процессе работы машины на различных грунтах с точностью до . . Формула изобретения Устройство для автоматического управления угловым положением рабочего органа машины, содержаццее датчик угла, соединенный с источником питания, и исполнительный блок, о тли чающееся тем, что, с целью повышения точности устройства, в него введены ключ, формирователь длительности импульсов, источник экспоненциального напряжения и коммутатор режима работы, выход источника питания подключен к первому входу ключа, второй вход которого соединен с выходом датчика угла, а выход соединен с входами формирователя длительности И1 1пульсов, коммутатора режима работы и источника экспоненциального напряжения, выход коммутатора режима работы соединен с вторым взводом источника экспоненциального напряжения, выход которого подключен к второму вхсяу формирователя длительности импульсов, выход которого соединен с входом исполнительного блока. Источники информации, принятые во внимание при эвсцертиэе 1,Авторское свидетельство СССР 194163, кл« G 05 В 11/60,17.12.65 2.Авторское свидетельство СССР № 139678, кл. Е 02 F 3/84,24.12.60 (прототип). .
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1983 |
|
SU1179511A1 |
| Устройство для управления процессом изготовления бетонных и железобетонных изделий | 1990 |
|
SU1728029A2 |
| Устройство для контроля параметров | 1982 |
|
SU1091127A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗГОТОВЛЕНИЯ БЕТОННЫХ И ЖЕЛЕЗОБЕТОННЫХ ИЗДЕЛИЙ | 1994 |
|
RU2082606C1 |
| Устройство стабилизации угла наклона рабочего органа планировочной машины | 1984 |
|
SU1167279A1 |
| Устройство для управления процессом изготовления бетонных и железобетонных изделий | 1987 |
|
SU1516364A2 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ РАСХОДОМ СЕМЯН ПНЕВМАТИЧЕСКОЙ СЕЯЛКОЙ | 1992 |
|
RU2043006C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ УВАЛА ТКАНИ НА СУКНОВАЛЬНОЙ МАШИНЕ | 1992 |
|
RU2027809C1 |
| Устройство управления и контроля работы невзрывных импульсных источников сейсмических сигналов | 1986 |
|
SU1408402A1 |
| Устройство для управления процессом изготовления бетонных и железобетонных изделий | 1986 |
|
SU1416320A1 |