Изобретение относится к планировочнь1м и землеройно-транспортным машинам и предназначено для автоматической стабилизации угла наклона рабочего органа планировочной машины относительно фавитационной вертикали.
Цель изобретения - повышение производительности планировочной машины путем повышения быстродействия системы стабилизации угла наклона ее рабочего органа.
На фиг. 1а изображены графики перемещения рабочего органа при работе базового объекта - системы стабилизации «Профиль ; на фиг. 1 б - график перемещений рабочего органа при работе предлагаемого устройства; на фиг. 2 - структурная схема предлагаемого устройства; на фиг. 3 -осциллограммы входных и выходных параметров функциональных узлов предлагаемой системы стабилизации, снятые при ступенчатом возмущающем воздействии; на фиг. .4 - выполненный вариант принципиальной схемы предлагаем мого устройства.
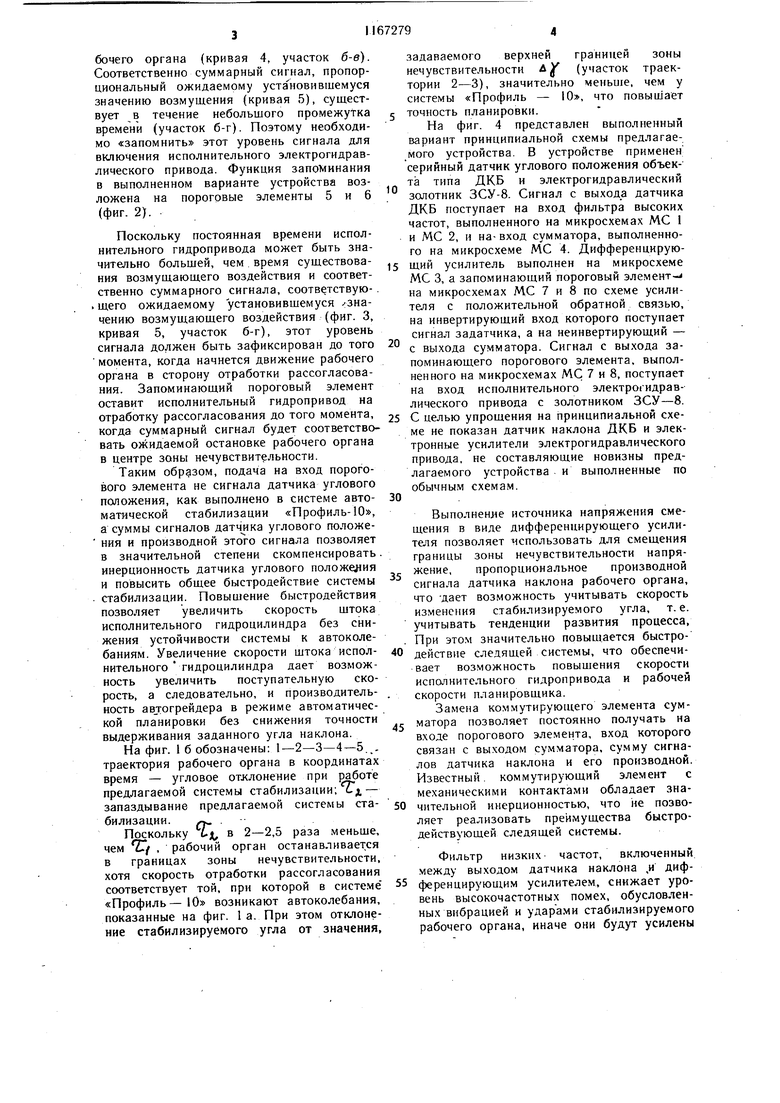
. Устройство (фиг. 2) содержит датчик 1 углового положения рабочего органа, выход которого соединен через фильтр 2 высоких частот и дифференцирующий усилитель 3 с одним из входов сумматора 4 и непосредственно - с вторым входом сумматора 4. Выход последнего соединен с входами запоминающих пороговых элементов 5 и 6. Вторые входы пороговых элементов соединены с выходом задатчи.ка 7 углового положения. Выходы пороговых элементов 5 и 6 соединены с входами электрогидравлическихисполнительных
приводов 8 и 9 соответственно подъема и опускания рабочего органа.
Устройство работает следующим образом.
Выходное напряжение датчика 1 углового положения рабочего органа, пропорциональное угловому положению рабочего органа, поступает на один из входов сумматора 4 и на вход фильтра 2 низких частот. Назначение фильтра - снизить напряжение высокочастотных помех, вызванных вибрацией корпуса датчика 1. С выхода фильтра 2 напряжение поступает на вход дифференцирующего усилителя 3, который выделяет напряжение пропорциональное производной сигнала датчика I углового положения. Это напряжение поступает на второй вход сумматора 4 и складывается с выходным напряжением датчика 1 углового положения.
Суммарное напряжение с выхода сумматора 4 поступает на входы пороговых элементов 5 и 6, на вторые входы которых подается напряжение, пропорциональное задаваемому углу наклона, с выхода задат
чика 7. При превышении пороговой величины и в зависимости от знака рассогласования появляется напряжение на выходе одного из пороговых элементов 5 или 6, которое включает исполнительный электрогидравлический привод 8 или 9 соответственно на подъем или опускание рабочего органа.
На фиг. 3 - представлены осциллограммы выходных напряжений функциональных узлов, полученные при испытаниях опытного образца устройства при входном воздействии, близком -к ступенчатому. Угол поворота корпуса датчика, т. е. входное
, воздействие, меняется согласно кривой 1. Изменение выходного сигнала датчика углового положения происходит согласно кривой 2, из которой видно, что выходное напряжение датчика углового положения достигает, установившегося значения через
0 0,78 с после начала движения. Кривая 3 иллюстрирует изменение выходного напряжения на выходе фильтра низки с частот, которое с незначительным ослаблением повторяет изменения выходного напряжения датчика углового положения рабочего органа. Кривая 4 представляет собой пронзводную выходного напряжения датчика углового положения, прошедшего, фильтр низких частот. Максимального значения производная достигает во время быстрого
HapactaHHH входного сигнала (участок аб, кривая 4). Кривая 5 иллюстрирует измене ние напряжения на выходе сумматора, ко торое складывается из выходного напряжения датчика углового положения и его производной. Масштабы кривых 2 и 5 одинаковы.
Как видно из фиг. 3, напряжение, про порциональное сумме выходного напряжения датчика углового положения и его производной, достигает уровня установившегося значения выходного напряжения датчика за 0,12 с (кривая 5). Если принять время запаздывания гидропривода равным 0,25 с, то суммарное время запаздывания для предлагаемого устройства, складывающееся из времени запаздывания дат чнка и гидропривода, не превысит 0,40 с.
Для известной системы стабилизации
углового положения типа «Профиль - 10,
где сигнал датчика углового положения не
корректируется его производной, время
0 запаздывания составит около 1 с.
Таким образом, быстродействие предлагаемой системы автоматической стабилизации может быть увеличено более, чем в два раза в сравнении с известными системами.
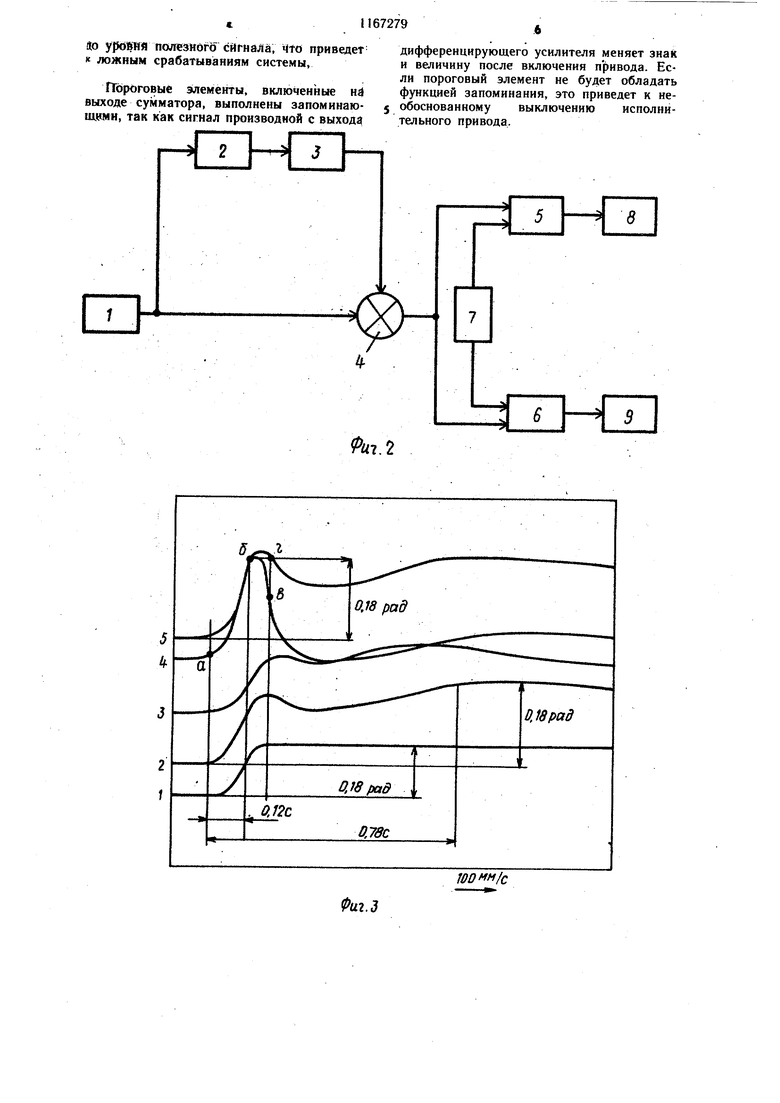
5 Как видно из фиг. 3, сигнал производной перемещения (кривая 4) существует только во время действия возмущения, т.е. во время перемещения стабилизируемого рабочето органа (кривая 4, участок б-в). Соответственно суммарный сигнал, пропорциональный ожидаемому установившемуся значению возмущения (кривая 5), существует в течение небольшого промежутка времени (участок б-г). Поэтому необходимо «запомнить этот уровень сигнала для включения исполнительного электрогидравлического привода. Функция запоминания в выполненном варианте устройства возложена на пороговые элементы 5 и 6 (фиг. 2). . Поскольку постоянная времени исполнительного гидропривода может быть значительно большей, чем время существоваНИИ возмущающего воздействия и соответственно суммарного сигнала, соответствую. щего ожидаемому установившемуся /значению возмущающего воздействия (фиг. 3, кривая 5, участок б-г), этот уровень сигнала должен быть зафиксирован до того момента, когда начнется движение рабочего органа в сторону отработки рассогласования. Запоминающий пороговый элемент оставит исполнительный гидропривод на отработку рассогласования до того момента, когда суммарный сигнал будет соответствовать ожидаемой остановке рабочего органа в центре зоны нечувствительности. Таким образом, подача на вход порогового элемента не сигнала датчика углового положения, как выполнено в системе автоматической стабилизации «Профиль-10, а суммы сигналов углового положения и производной этого сигнала позволяет в значительной степени скомпенсировать инерционность датчика углового положелия и повысить общее быстродействие системы стабилизации. Повышение быстродействия позволяет увеличить скорость штока исполнительного гидроцилиндра без снижения устойчивости системы к автоколебаниям. Увеличение скорости штока исполнительного гидроцилиндра дает возможность увеличить поступательную скорость, а следовательно, и производительность aвJoгpeйдepa в режиме автоматической планировки без снижения точности выдерживания заданного угла наклона. На фиг. 1 б обозначены: 1-2-3-4-5. . траектория рабочего органа в координатах время - угловое от.клонение при работе предлагаемой системы стабилизации; од,- запаздывание предлагаемой системы стабилизации. Поскольку t.J, в 2-2,5 раза меньше, чем ZTjf , рабочий орган останавливается в границах зоны нечувствительности, хотя скорость отработки рассогласования соответствует той, при которой в системе «Профиль- 10 возникают автоколебания, показанные на фиг. 1 а. При этом отклонение стабилизируемого угла от значения. задаваемого верхней границей зоны нечувствительности Д (участок траектории 2-3), значительно меньше, чем у системы «Профиль - 10, что повыцгает точность планировки. На фиг. 4 представлен выполненный вариант принципиальной схемы предлагае-. мого устройства. В устройстве применен серийный датчик углового положения объекта типа ДКБ и электрогидравлический золотник ЗСУ-8. Сигнал с выхода датчика ДКБ поступает на вход фильтра высоких частот, выполненного на микросхемах МС 1 и МС 2, и на- вход сумматора, выполненного на микросхеме МС 4. Дифференцирующий усилитель выполнен на микросхеме МС 3, а запоминающий пороговый элемент-J на микросхемах МС 7 и 8 по схеме усилителя с положительной обратной связью, на инвертирующий вход которого поступает сигнал задатчика, а на неинвертирующий - с выхода сумматора. Сигнал с выхода запоминающего порогового элемента, выполненного на микросхемах МС 7 и 8, поступает на вход исполнительного электрогидравлического привода с золотником ЗСУ-8. С целью упрощения на принципиальной схеме не показан датчик наклона ДКБ и электронные усилители электрогидравлического привода, не составляющие новизны предлагаемого устройства . и выполненные по обычным схемам. Выполнен.ие источника напряжения смещения в виде дифференцирующего усилитетя позволяет использовать для смещения границы зоны нечувствительности напряжение, пропорциональное производной сигнала датчика наклона рабочего органа, что -дает возможность учитывать скорость изменения стабилизируемого угла, т.е. учитывать тенденции развития процесса, При этом значительно повышается быстродействие следящей системы, что обеспечивает возможность повышения скорости исполнительного гидропривода и рабочей скорости планировщика. Замена коммутирующего элемента сумматора позволяет постоянно получать на входе порогового элемента, вход которого связан с выходом сумматора, сумму сигналов датчика наклона и его производной. Известный, коммутирующий элемент с механическими контактами обладает значительной инерционностью, что не позволяет реализовать преимущества быстродействующей следящей системы. Фильтр низких частот, включенный между выходом датчика наклона ,и дифференцирующим усилителем, снижает уровень высокочастотных помех, обусловленных вибрацией и ударами стабилизируемого рабочего органа, иначе они будут усилены
dto уровня полезного сигнала, что приведет ложным срабатываниям системы.
Пороговые элементы, включенные н4 выходе сумматора, выполнены запоминающими, так как сигнал производной с выходу
дифференцнрующего усилителя меняет знак и величину после включения привода. Если пороговый элемент не будет обладать функцией запоминания, это прнведет к необоснованному выключению исполнительного привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АКТИВНОЙ ВИБРОЗАЩИТЫ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2406620C2 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1983 |
|
SU1102869A1 |
| Устройство управления рабочим органом землеройной машины | 1983 |
|
SU1122792A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Устройство для виброзащиты сиденья транспортного средства | 1983 |
|
SU1124266A1 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| ПРОТИВОБЛОКИРОВОЧНОЕ УСТРОЙСТВО | 1971 |
|
SU305630A1 |
| Устройство для стабилизации объекта упругой конструкции | 1988 |
|
SU1532897A1 |
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
УСТРОЙСТВО СТАБИЛИЗАЦИИ УГЛА НАКЛОНА РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ, содержащее датчик и задатчик угла наклона. ii Jr коммутирующий элемент, пороговые . элементы, источник напряжения смещения и исполнительные механизмы, отличающееся тем, что, с целью повыщения быстродействия, оно снабжено фильтром низких частот, при этом источник напряжения смещения выполнен в виде дифференцирующего усилителя, коммутирующий элемент - в виде сумматора, к первому входу которого подключен датчик уГла наклона непосредственно, а к второму - через последовательно соединенные фильтр низких частот и дифференцирующий усилитель, выход сумматора-соединен с первыми вхо.дами пороговых элементов,к вторым вхо.дам которых подключены выходы задатчика угла наклона, а выходы пороговых с € элементов подключены к соответствующим исполнительным механизмам. (Л О) ч ч 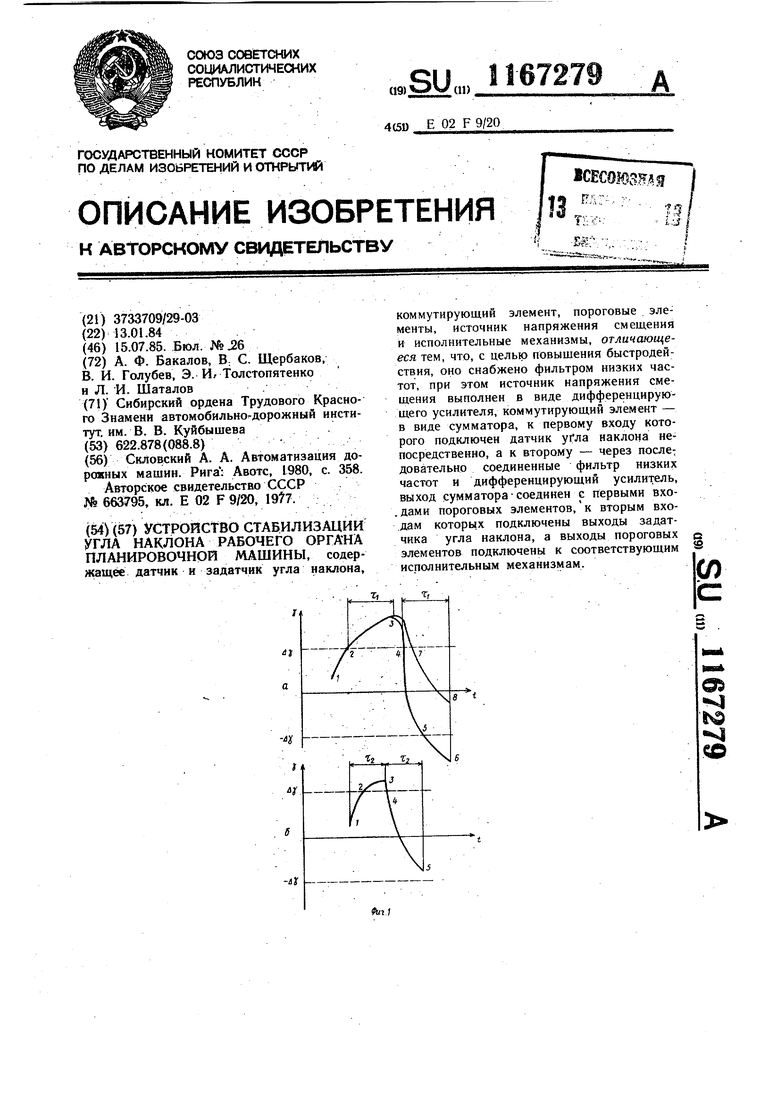
«7.2
| Скловский А | |||
| А | |||
| Автоматизация дорохных машин | |||
| Рига: Авотс, 1980, с | |||
| Зажим для канатной тяги | 1919 |
|
SU358A1 |
| Устройство автоматической стабилизации угла наклона рабочего органа землеройных машин | 1977 |
|
SU663795A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
