натор знака отклонения угла нагрузки - с первым входом реверсивньго счетчика, второй вход второго зшравляемого ключа соединен с выходом третьей схемы сравнения, а выход- через блок задания коррекхщи напряжения с первым входом второго сумматора, второй вход второго сумматора через блок функгрюнальной связи напряжения и частоты соединен с выходом первого сумматора, а выход с входом регулирования напряжения регулируемого преобразователя час- -тоты, первый вход первого сумматора подключен к выходу задатчика скорое7951-1
ти, второй вход - к второму выходу преобразователя постоянной частоты, а выход первого сумматора подключен к входу первой схемы сравнения, вторым входом соединенной с выходом ре. гулятора скорости, выход первой схемы ;равнения через преобразователь напряжения в чистоту соединён с вторым входом преобразователя напряжения в число импульсов и входом первого заправляемого ключа, другой вход первого управляемого ключа соединен с выходом преобразователя напряжения в число импульсов, а выход- свторьм входом реверсивного счетчика.


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления двигателем двойного питания | 1987 |
|
SU1515326A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Устройство для моделирования @ -фазного вентильного электродвигателя | 1990 |
|
SU1797133A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU826543A1 |
| Управляемый электропривод | 1983 |
|
SU1144201A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1541752A1 |
| СПОСОБ ПОВЫШЕНИЯ КАЧЕСТВА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2011 |
|
RU2475914C1 |
| Нереверсивный вентильный электропривод постоянного тока | 1981 |
|
SU1070679A1 |

ЭЛЕКТРОПРИВОД, содержащий машину двойного питания, имеющую многофазную обмотку управления, многофазную обмотку возбуждения и многофазную сигнальную обмотку, преобразователь регулируемой частоты с вхо- дами регулирования частоты и напряжения, выходом подключенный к обмотке управления, преобразователь постоянной частоты, выход которого соединен с обмоткой возбуждения, фазовый детектор, один вход которого соединен с выходом сигнальной обмотки, а другой - с выходом сумматора, входы которого соединены с датчиком тока обмотки возбуждения и с выходом сигнальной обмотки, выход фазового детектора соединен с первым входом блока селекции сигналов управления, измеритель частоты вращения, выход которого подключен к регулятору.скорости, другой вход которого соединен с задатчиком скорости, а выход связан с блоком управления частотой преобразователя регулируемой частоты, отличающийся тем, что, с целью подьпиения равномерности вращения и улучшения энергетических показателей, измеритель частоты вращения выполнен в виде измерителя ЭДС-вращения, подключенного к выходам сигнальной обмотки и входам обмотки возбуждения, блок управления частотой состоит из постоянных программируемых устройств, реверсивного счетчика и формирователя сигналов управления, при этом входы по- стоянных программирующих устройств соединены с выходами реверсивного счетчика, а выходы через формирователь сигналов управления соединены с входом регулирования 1астоты преобразователя регулируемой частоты, сл селектор сигналов управления состоит из сумматора, схемы сравнения, преобразователя напряжения в частоту управляемого ключа, преобразователя напряжения в число импульсов, блока определения заданного угла нагрузки, второй схемы сравнения, дискриминатора знака отклонения угла со нагрузки, третьей схемы сравнения, СП второго управляемого ключа, блока- задания коррекции напряжения, второго . сумматора и блока функциональной связи напряжения и частоты, при этом первый вход второй схемы сравнения является первым входом блока селекции сигналов управления, второй вход второй схемы сравнения через блок определения заданного угла нагрузки соединен с выходом заДатчика скорости, а выход - с входом ч третьей схемы сравнения, с первым входом второго управляемого ключа, с входом преобразователя напряжения в число импульсов и через дискрими
1
Изобретейиё относится к электротехнике имсжет. быть использовано -в системах точного -электропривода, требующих улучшенных точйостных и динамических характеристик, например, приводах роботов, приводов подач и т.д.
Цель изобретения - повышение равномерности вращения и улучшение энергетических показателей.
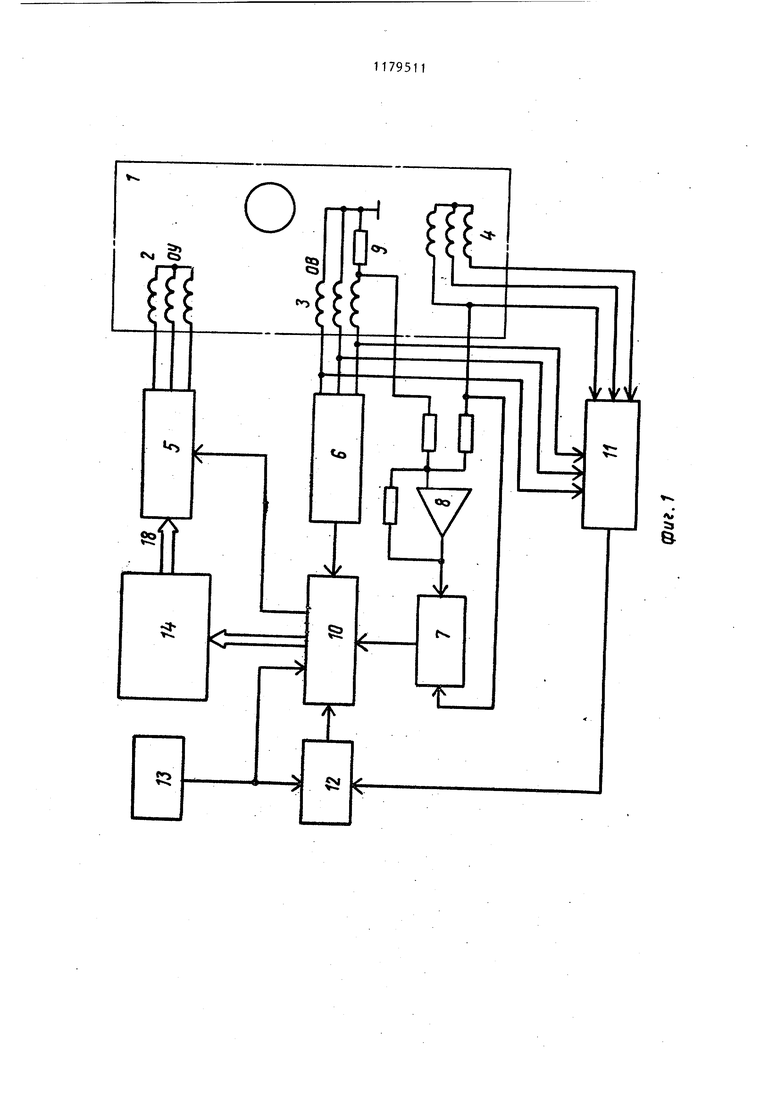
На фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг. 2 - функциональная схема блока селекгрни сигналов управления и блока управления частотой.
Электропривод содержит машину 1 двойного питания, имеющую многофазную обмотку 2 управления, многофазную обмотку 3. возбуждения, многофазную сигнальнзоо обмотку 4, преобразователь 5 регулируемой частоты с входами регулирования частоты и напряжения, выходом подключенный к обмотке 2 управления, преобразо-. ватель 6 постоянной частоты, выход ко- орого соединен с обмоткой 3 во буждения, фазовый детектор 7, один вход которого соединен с выходом сигнальной обмотки 4, а второй - с выходом сумматора 8, входы которого соединены с датчиком 9 тока обмотки возбукдения и с выходом сигнальной обмотки 4, выход фазового детектора соединен спервым входомблока 10 селекции сигналов управления, измеритель 11 частоты вращения,выходом . подключенный к регулятору12 скорости, второй вход которого соединен с задатчиком 13 скорости, а 5 связан с блоком 14 управления частотой преобразователя 5 )егулйруемойчастоты.
Блок управления частотой (фиг. 2) состоит из постоянных программируемых устройств 15, реверсивКого счетчика 16 и формирователя 17 сигналов зпггравлення, при этом входы постоянного программируемого устройства соединены с выходами реверсивного
5 счетчика16, а выходы через формирователь сигналов управления соединены с входом 18 15егулир6вания частоты преобразователя 5 регулируемой частоты. Селектор 10 сигналов управ-0 ления состоит из сумматора 19, схемы 20 сравнения, преобразователя 21 напряжения в частоту, управляемот га ключа 22, преобразователи 23 напряжения в число импульсов, блика
5 24 определения заданного угла на- грузки, второй бхемь 25 сравнения,дискриминатора 26 знака отклонения угла нагрузки, третьей схемы 27 сравнения, второго управляемого
0 ключа 28, блока 29 задания коррекции напряжения, второго сумматора 30 и блока 31 функциональной связи напряжения и частоты, при этом первьй вход второй схемы 25 сравне5 ния является первым входомблока .селекции сигналов управления,- второй вход второй схемы сравнения через блок определения управления, второй вход второй схемы сравнения через блок 24 определения заданного угла нагрузки соединен с BbixofAOM задатчнка скорости,- а выход - с. ВХОДОМтретьей схемы-27 сравнения, -С первым входом второго управляемого ключа 28, с входом преобразователя 21 напряжения в число импульсов, и через дискриминатор 26 знака отклонения угла нагрузки, с первым входом реверсивного счетчика 16, второй вход второго управляемого ключа 28 соединен с вы- . ходом третьей схемы 26 сравнения, а выход - через блок задания коррекции нацряжения,с первым входом второго сумматора 30, второй вход второго сумматора через блок 31 функциональной связи напряжения и частоты соединен с выходом первого сумматора 19, а выход - с входом регулирования напряжения регулируемого преобразователя частоты, первьй вход первого сумматора 19 подключен к выходу задатчика 13 скорости, второй вход первого сумматора 19 подключен к второму выходу преобразователя 6 постоянной частоты, а выход - к первому входу первой схемы.20 сравнения, второй вход которой соединен с выходом регулятора 12 скорости, выход первой схемы сравнения через преобразователь 21 напряжения в частоту соединен с вторым входом преобрайователя 23напряженияв число импульсов и с входом первого управляемого ключа 22, второй вход которого. Соединен с выходом преобразовате.ля 23 напряжения в число импульсов, а выход - с вторым входом реверсивного счетчика 16. Электропривод функционирует следующим образом. Блок- 10 селекции сигналов управления на основеанализа состояния: исполнительного двигателя определяет структуру регулятора, позволяюЩую повысить равномерность йраще- ния при минимальных энергетических затратах. Каналами воздействия регулятора являются канал регулирования частоты, фазы и канал регулирования амплитуды напряжения преобразователя 5 регулируемой частоты. 114 Сзт матор 19 определяет сигнал, пропорциональный частоте питания обмотки управления СОм г СОд + СО , где QU - частота обмотки управления ; (Jp- частота обмотки возбуждения; заданная частота вращения. Схема 20 сравнения замыкает отрнцйтельную обратнуй связь по частоте вращения ротора. Напряжение (0ц с выхода сумматора 19 поступает на вход блока 31 фукциональной связи напряжения и частоты, определяющий функциональную зависимость амплитуды напряжения питания обмотки управления от частоты в установившемся режиме (например, закон Костенко). Преобразователь 21 напряжения в частоту осуществляет преобразование напряжения йу в частоту i, L , тактирующую считывание постоянных программируемых устройств 15. Частота -1 отличается от частоты питания обмотки управления в и раз, где п - число дискрет формируемого напряжения на один период. Вторая схема 25 сравнения определяет отклонение А действительного значения угла нагрузки Од от заданного его значения 8д , определяемого блоком 24 определения заданного значения угла нагрузки Б функции заданной частоты вращения Sо (йэ) , где So (са) функциональная зависимость типа насьщение. Знак отклонения i угла нагрузки определяется дискриминатором 26знака отклонения угла нагрузки и далее воздействует на направление счета реверсивного счет чика 16. Преобразователь 23 напряжения в число импульсов преобразует амплитуду отклонения л в пачки импульсов высокой частоты. Максимальное число импульсов в каждой пачке (серии) ограничено длительностью паузы на выходе преобразователя 21 напряжения в частоту. Коррекция фазы напр.яжения питающего обмотку управления происходит и раз за период, т.е. после каждого импульса преобразователя 21 напряжения в -частоту, направление коррекции определяется дискриминатором 26 знака отклонейия угла нагрузки, Третбя схема 27 сравнения сравнивает отклонение д с некоторой константой К, зависящей от мощности и назначения электроприйода и определяющей целесообразнобть коррекции амплитуды Напряжения обмотки управления. Если то работает
.только канал коррекции фазы, если , то открывается второй управляемый ключ 28 и происходит коррекция закона изменения напряжения в функции частоты, задаваемого блоком 31. Блок 29 задания коррекции напряжения определяет функциональную зависимость корректирующего сигнала от величины отклонения Л угла нагрузки (нелинейная зависимость типа, пропорциональное звено с ограничением).
В результате в установившемся режиме в электроприводе осуществляется отрицательная обратная связь по.мгновенному значению частоты вращения, позволяющая избежать режима автоколебаний, обусловленных нелинейностью фазового детектора, а фа-
.зовая подстройка напряжения питания обмотки управления позволяет ком- пенс фовать автоколебания, обусловленные нелинейностью исполнительного двигателя как элемента системы автоматического управления. В случае возникновения больших возмущаюпщх воздействий на валу двигателя дополнительно подключается канал коррекции закона изменения амплитуды напряжения обмотки управления, стремящийся вернуть систему р режим маль1Х колебаний. В обоих режима угол нагрузки поддерживается вблизи его заданного значения, что позволяет значительно улучшить энергетические показатели электропривода.
Измеритель 11 скорости вьшолнен в виде измерителя ЭДС вращения и функционирует следующим образом.
Сигнальная обмотка 4 уложена в пазах и с полюсностью обмотки 3 возбуждения. ЭДС, наводимая в сигнальной (. обмотке, состоит из трансформаторной составляющей Ед , ЭДС вращения и ЭДС от высших гармонических Е г
ЕС
вычитая ЭДС Е и после соответствующей фильтрации получает ЭДС вращения. Такая реализация измерителя 5 частоты вращения позволяет уменьшить постоянную времени в цепи обратной связи поскорости,что улучшает качество системы и позволяет избежать использование дополнительной вращающейся машины, чтЬ повьЩ1ает надежность системы электропривода.
Блок 14 управлений частотой преобразователя регулируемой частоты представляет собой постоянное
5 -програмшфуемое устройство с. преобразователем частоты импульсов в код адреса считьгоаемых ячеек памяти, выполненным в виде реверсивного счетчика 16 на входе и формирователя 17
0 сигналов з равления частотой к виду/ необходимому для нормальной работы преобразователя регулируемой частоты. В постоянное программируемое устройство йредваритёльно записаны
5 состояния ключей преобразователя регулируемой частогы ria каждый тактовьй импульс входного сигнала для одного периода питающего напряжения
е желаемой формы (например, по закону
0 ШИМ)J что позвсшяет уменьшить потери в машине и увеличить значение полезной составляющей вращающего момента.:
5 Данный электропривод, в отпкчие от прототипа, за счет выбора необходимой для данного режиМа работы структуры и параметров регулятора позволяет прецизионно стабилизировать мгновенное значение скорости относительно ее заданного значения при поддержании постоянной для данной скорости перегрузочной способности. Формирование гармонического
состава напряжений, питающих обмотки машины двойного питания, позволяет значительноулучшить Энергетические показатели электропривода, а именно: снизить цотери в обмотках и стали
0 машины двойного питания, Избежать возникновения паразитных составляющих электромагнитного момента от высших гармонических поля, увеличить значение полезного вращающего момента. Использование в качестве измерителя скорости Статического датчика позволяет повысить надежность электропривода.
KJ2 K.J3
K.r
| Электропривод | 1980 |
|
SU955484A2 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Электропривод | 1980 |
|
SU1059647A2 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
