(54) ГУСЕНИЧНЫЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| ГУСЕНИЧНЫЙ ПРИВОД ДЛЯ КОНВЕЙЕРА С ЦЕПНЫМ ТЯГОВЫМ ОРГАНОМ | 1972 |
|
SU327099A1 |
| ГУСЕНИЧНЫЙ ПРИВОД ДЛЯ КОНВЕЙЕРА С ЦЕПНЫМ ТЯГОВЫМ ОРГАНОМ | 1972 |
|
SU330080A1 |
| Конвейерный гусеничный привод | 1990 |
|
SU1778047A1 |
| Гусеничный привод конвейера | 1981 |
|
SU1028570A1 |
| ГУСЕНИЧНЫЙ ПРИВОД ДЛЯ КОНВЕЙЕРОВ с ЦЕПНЫМ ТЯГОВЫМ ОРГАНОМ | 1964 |
|
SU165404A1 |
| Промежуточный привод для тяговой цепи конвейера | 1980 |
|
SU941255A1 |
| Гусеничный привод | 1978 |
|
SU753723A1 |
| Приводное устройство цепного конвейера | 1982 |
|
SU1049376A1 |
| ГУСЕНИЧНЫЙ ПРИВОД КОНВЕЙЕРА | 1969 |
|
SU254382A1 |
| Гусеничный привод конвейера | 1979 |
|
SU867798A1 |
Изобретение относится к области конвейеростроения, а именно к приводным устройствам конвейеров.
Известен гусеничный привод для конвейера с цепным тяговым органом, содержащий бесконечно за мкнутую тяговую цепь с шарнирно закрепленными на ней кулаками с хвостовиками, взаимодействующими с валиками щарниров тягового органа конвейера, установленными на ходовых роликах, у которого, для обеспечения одновременной загрузки всех толкающих кулачков, находящихся в зоне зацепления с тяговым органом конвейера, на осях тяговой цепи установлены Г-образные рычаги, соединенные пружиной с хвостовиками кулаков 1.
Недостатком этой конструкции является то, что она не обеспечивает плавный выход толкающих кулачков из зацепления с цепным тяговым органом конвейера, т. к. при переходе лесущего кулачок звена с прямолинейной направляющей на звездочку, во взаимодействие с цепью конвейера приходят все более удаленные от оси цепи привода точки поверхности кулака, имеющие на криволинейном участке траектории приводной цепи скорость больщую, чем скорость толкающих кулачков на прямолинейной направляющей. Кроме того, нри
выходе кулака из зацеиления происходит дополнптельный поворот его относительно щарнирно связанного с ним звена цепи, из чего следует, что нрулчина, связывающая Г-образные рычаги хвостовиками кулачков, еще больше растянется, а усилие, с которым выходящий из зацепления кулак действует на цепь, будет увеличиваться до полного выхода к лака из зацепления. Таким образом, при выходе кулака из зацепления совершается дополиительная работа, связанная с растяжением пружины.
Наиболее близким к изобретеиию является гусеничный привод, содержащий бес5конечно замкнутую тяговую цепь с шарнирно закрепленными на ней кулачками, опирающимися на направляющую через бегунки. Кулаки устаиовлены на ходовых роликах, расположенных на направляю0щих, причем, с целью увеличения количества одновременно толкающих кулаков, направляющие выполнены в виде шариирно соединенных между собой секций, установленных на подпружиненных олорах (2.
5 Такая конструкция гусеничного привода обеспечивает плавный вход и выход толкающих «злаков.
Недостатком конструкции является то, что одна подпружиненная секция направ0ляющих может удерживать в зацеплении
не более двух кулаков и, следовательно, для обеспечения одновременной загрузки, например, шести кулаков потребуется установ.ить 3 шарни.рио соединенных .секции, для восьми .кулаков - 4 и т. д., а увеличение числа иодпружинеЕных секций влечет за собой значительное усложнение конструкции иривода в целом.
Целью изобретения является унрощенне конструкции привода нри увеличении количества одиовременно загрулкенных кулаков.
Указанная цель достигается тем, что каждый кзлак соединен с бегунком иосредством подпружинен.ного держателя.
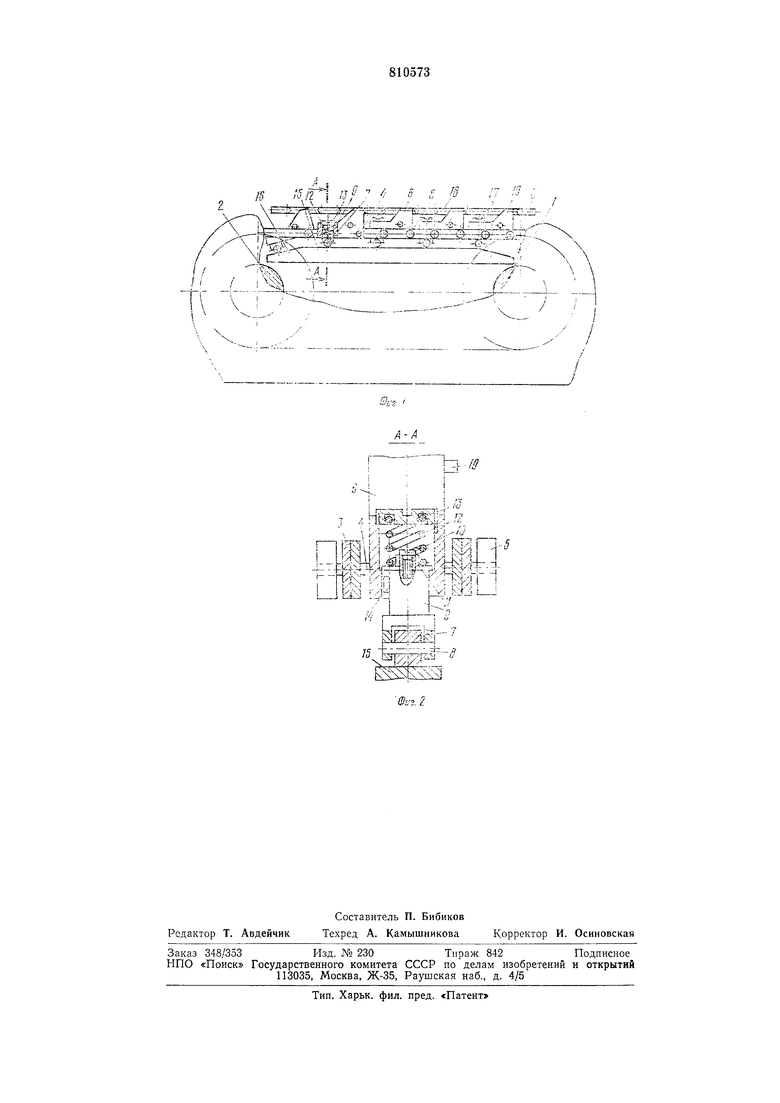
На фиг. 1 изображен общий вид гусеничного привода; на фиг. 2 - разрез Л-А фиг. 1.
Гусеничный привод содержит приводную 1 и натяжную 2 звездочки, бесконечную приводную цеиь 3 с валиком 4, которые на внешних концах снабжены бегунками 5, передвигаюшимися .по жесткой направляюш,ей (на чертеже условно не показана).
Между внутренними пластинами цепи 5 на валиках 4 шарнирно смонтированы кулаки 6, снабженные бегунками 7, установленными на осях 8 в держателях 9, а на противоположном бегунку конце к держателю 9 прикреплен винтом 10 колпачок 11, на котором сбазирована пружина 12, удерживаемая в кулаке 6 резьбовой пробкой 13. От проворота держатель 9 удерживается шпонкой 14. Кроме того, привод содержит также жесткую направляющую 15 для бегунков 7, .имеющую наклонные участки ввода в зацепление 16 и вывода из зацепления /7 с цепью 18 конвейера кулаков 6, снабженных ограничителями 19.
Привод работает следующим образом.
Приводная цепь 3 посредством кулаков
6 входит в зацепление с цеиью 18 конвейера, сообщая ей движение. Передвигаясь но наклонному участку 16, кулаки плавно входят в зацепление с цепью конвейера и плавно выходят из него на участке 17 направляющей 15.
Нагрузка на кулаки 6 передается пружинам 12, которые, сжимаясь, передают нагрузку через держатели 9 на бегунки 7.
Последние, запираясь в направляющую 15, удерживают кулаки в зацеплении. Пружины 12 обеспечивают параллельную загрузку всех кулаков, находящихся в зацеплении. При прохождении кулаками звездочек,
ограиичитель 19 иредотвращает проворот кулаков 6 на валиках 4.
Описанная конструкция гусеничного привода обладает простотой конструкции нри увеличении количества одновременно нагруженных толкающих кулаков.
Формула изобретения
Гусеничный привод, содержащий бесконечно замкнутую тяговую цень с щарнирно закрепленными на ней кулаками, опирающимися па направляющую через бегунки, отличающийся тем, что, с целью упрощения его конструкции при увеличении количества одновременно загруженных кулаков, каждый кулак соединен с бегунком посредством подпружиненного держателя. Источники информации, прниятые во
внимание при экспертизе:
SS.lM fJ 7 6 5 S
IS
