(54) ПРОМЕЖУТОЧНЫЙ ПРИВОД ДЛЯ ТЯГОВОЙ ЦЕПИ
КОНВЕЙЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Гусеничный привод конвейера | 1981 |
|
SU1028570A1 |
| Гусеничный привод | 1979 |
|
SU810573A1 |
| КРИВОЛИНЕЙНЫЙ МНОГОПРИВОДНОЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2209167C2 |
| ГУСЕНИЧНЫЙ ПРИВОД ДЛЯ КОНВЕЙЕРА С ЦЕПНЫМ ТЯГОВЫМ ОРГАНОМ | 1972 |
|
SU327099A1 |
| Гусеничный привод тягового органа конвейера | 1985 |
|
SU1283181A1 |
| ГУСЕНИЧНЫЙ ПРИВОД для КОНВЕЙЕРОВ С ЦЕПНЫМ ТЯГОВЫМ ОРГАНОМ | 1970 |
|
SU275832A1 |
| КОЛЬЦЕВОЙ КОНВЕЙЕР | 2003 |
|
RU2255031C1 |
| Гусеничный привод цепного конвейера | 1984 |
|
SU1177228A1 |
| Конвейерный гусеничный привод | 1990 |
|
SU1778047A1 |
| ГУСЕНИЧНЫЙ ПРИВОД ДЛЯ КОНВЕЙЕРОВ с ЦЕПНЫМ ТЯГОВЫМ ОРГАНОМ | 1964 |
|
SU165404A1 |
1
Изобретение относится к промышленному транспорту, а именно к промежуточному приводу для тяговой цепи конвейера.
Известна конструкция гусеничного привода, включающая приводную и натяжную звездочки, огибаемые приводной цепью с шарнирно закрепленными на ней кулаками, снабженными на концах бегунками. Между звездочками на корпусе привода установлена направляющая шина для приводной цепи и бегунков кулаков. Направляющая шина состоит из секций, шарнирно соединенных между собой. Шина имеет наклонные участки ввода и вывода кулаков из зацепления с тяговой цепью конвейера. Шарнирные секции направляющей установлены на пружинах 1.
Однако привод предусматривает возможность работы при конструкции приводной цепи исключительно с шарнирно закрепленными на ней кулаками, что вызывает необходимость использовать две направляющие, одна из которых предназначена для приводной цепи, а другая - для бегунков кулаков, при этом первая направляющая выполняется жесткой, а вторая - подпружиненной; привод не может быть применен, если
кулаки выполнены заодно целое с цепью или закреплены жестко на звеньях приводной цепи.
Известен также промежуточный привод тяговой цепи конвейера, содержащий беско5 нечно-замкнутую тяговую цепь с шарнирно закрепленными на ее звеньях подпружиненными звеньями, и направляющую шину 2. В этом приводе за счет упругого закрепления кулаков снижены динамические ЛИЯ, действующие на элементы привода и тяговую цепь. Однако, такое закрепление кулаков привода ограничивает его тяговые возможности.
Известен также промежуточный привод для тяговой цепи конвейера, содержащий
15 бесконечно-замкнутую тяговую цепь с жестко закрепленными на ее звеньях кулаками для взаимодействия с тяговой цепью конвейера, и направляющую шину, имеющую горизонтальный участок и расположенные
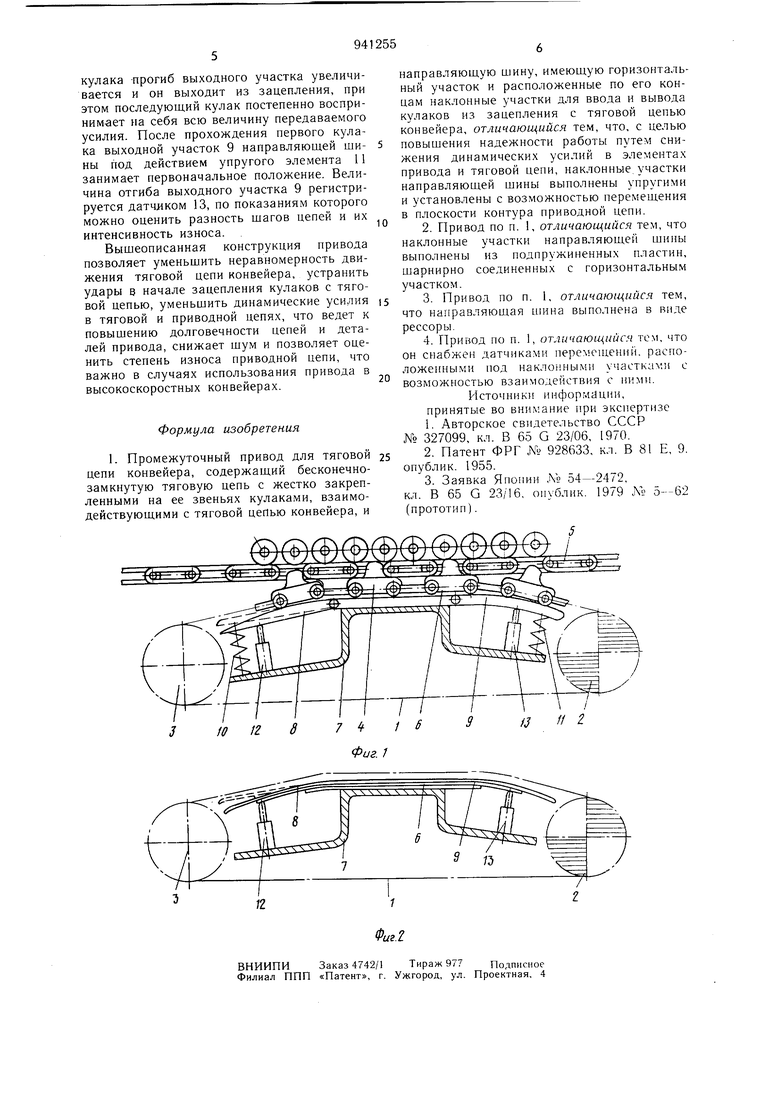
2Q по его концам наклонные участки для ввода и вывода кулаков из зацепления с тяговой цепью конвейера 3.
При наличии жестко закрепленной направляющей шины в этом приводе ввод кулаков в зацепление с тяговой цепью конвейера вызывает увеличение скорости его движения, что является причиной неравномерности движения цепи и ударов и, как следствие, увеличение динамических усилий в деталях всего привода. Целью изобретения является повышение надежности работы путем снижения динамических усилий в элементах привода и тяговой цепи. Для этого наклонные участки направляющей шины выполнены упругими, с ВОЗМОЖностью перемещения в плоскости контура приводной цепи. Наклонные участки направляющей шины могут быть выполнены, или из подпружиненных пластин, шарнирно соединенных с горизонтальным участком, или в виде реесор. Кроме того, привод может быть снабжен датчиками перемещений, расположенными под наклонными участками с возможностью взаимодействия с ними. На фиг. 1 изображен общий вид привода по первому варианту исполнения направляющей шины, вид сбоку; на фиг. 2 - общий вид направляющей по второму варианту ее исполнения. Промежуточный привод для цепи конвейера содержит цепь 1, огибающую при,водную 2 и натяжную 3 звездочки. На цепи установлены кулаки 4, которые входят во рзаимодействие со звеньями тяговой цепи 5 конвейера. Направляющая шина 6 закреплена неподвижно на раме 7. Направляющая шина б имеет участок 8 ввода кулаков 4 в зацепление с тяговой цепью 5 |И участок 9 - вывода кулаков из зацепле;ния с тяговой цепью 5. Участки 8 и 9 могут быть выполнены либо в виде пластин, которые шарнирно крепятся к концам направляющей шины 6 и подпружинены пружинами 10 и И (фиг. 1), либо в виде, например, рессор и за одно целое с направляющей щиной 6 (фиг. 2). На раме 7 установлены датчики 12 и 13, регистрирующие перемещение участков 8 и 9 ввода и вывода кулаков. Привод конвейера работает следующим образом. При движении приводной цепи 1 кулаки 4, перемещаясь по направляющей щине 6, входят в зацепление с тяговой цепью 5 конвейера. В случае, если шаг кулаков меньще щага тяговой цепи конвейера, взаимодействие начнется при движении кулака по участку ввода 8 щины 6. При дальнейщем движении кулак, передавая усилие тяговой цепи конвейера, переходит на шину 6, которая обеспечивает его поступательное движение параллельно тяговой цепи. Их взаимодействие продолжается до тех пор, пока последующий кулак не войдет в зацепление с противостоящим (соответствующим) ему звеном тяговой цепи. В этот момент скорость, передаваемая тяговой цепи вторым кулаком, увеличивается, что позволяет предыдущему кулаку выйти из зацепления. Однако, как только второй кулак должен будет начать передавать усилие тяговой цепи, участок ввода 8 направляющей щины 6 прогинается (изменит свое положение) таким образом, что второй кулак в самый начальный момент зацепления только касается тяговой цепи, не освобождая (не разгружая) от передачи усилия предыдущий кулак. Таким образом, момент входа кулака в зацепление не вызывает удара. При дальнейщем движении приводной цепи кулак, перемещаясь по участку ввода 8 направляющей щины 6, приближается к точке ее соединения с неподвижным участком шины 6. При этом участок 8 под действием упругого элемента - пружины 10 постепенно выпрямляется, занимая первоначальное положение, увеличивая при этом передаваемую нагрузку на второй кулак до полного освобождения первого кулака от взаимодействия с тяговой цепью конвейера. Таким образом, в первоначальный период зацепления в передаче усилия тяговой цепи участвуют два кулака и распределение между ними передаваемого усилия осуществляется постепенно. Величина периода передачи усилия зависит от кинематики деталей привода и от параметров и места установки упругого крепления. В случае исполнения направляющей шины в виде рессоры 6 (фиг. 2), средний прямой участок которой крепится жестко к раме привода, а участки ввода и вывода имеют возможность прогибаться под действием кулаков, работа привода осуществляется в той же последовательности. Разница заключается в том, что входной участок направляющей щины возвращается в исходное положение под действием сил упругости рессоры. Перемещение участка 8 регистрируется датчиком 12, по показаниям которого можно оценить разность шагов цепей 1 и 5. Регулярно производимые замеры позволяют оценить изменение этой разницы. Учитывая, что износ тяговой цепи 5 значительно меньше, чем приводной цепи 1, можно с помощью этих показаний оценить износ приводной цепи. Вышеописанная работа привода имеет место, когда шаг кулаков меньше шага тяговой цепи 5 конвейера. В случае, когда шаг кулаков больше шага тяговой цепи, работа привода осуществляется следующим образом. Каждый кулак 4 передает усилие тяговой цепи конвейера при движении по прямолинейному участку направляющей шины 6 и ее выходному участку 9. Последний под действием реакции со стороны катков кулака при его движении постепенно прогибается. Это заставляет последуюший кулак войти в зацепление с тяговой цепью конвейера. При дальнейщем движении первого
