154) ГУСЕНИЧНЫЙ ПРИВОД КОНВЕЙЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерный гусеничный привод | 1990 |
|
SU1778047A1 |
| ГУСЕНИЧНЫЙ ПРИВОД для КОНВЕЙЕРОВ С ЦЕПНЫМ ТЯГОВЫМ ОРГАНОМ | 1970 |
|
SU275832A1 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| Гусеничный привод | 1979 |
|
SU810573A1 |
| Механизм подачи горной машины | 1979 |
|
SU866182A1 |
| Гусеничный привод | 1978 |
|
SU753723A1 |
| КРИВОЛИНЕЙНЫЙ МНОГОПРИВОДНОЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2209167C2 |
| ГУСЕНИЧНЫЙ ПРИВОД ДЛЯ КОНВЕЙЕРА С ЦЕПНЫМ ТЯГОВЫМ ОРГАНОМ | 1972 |
|
SU330080A1 |
| Устройство для поворота грузовых подвесок конвейера | 1983 |
|
SU1155535A1 |
| Цепной накопительный конвейер | 1985 |
|
SU1266803A1 |
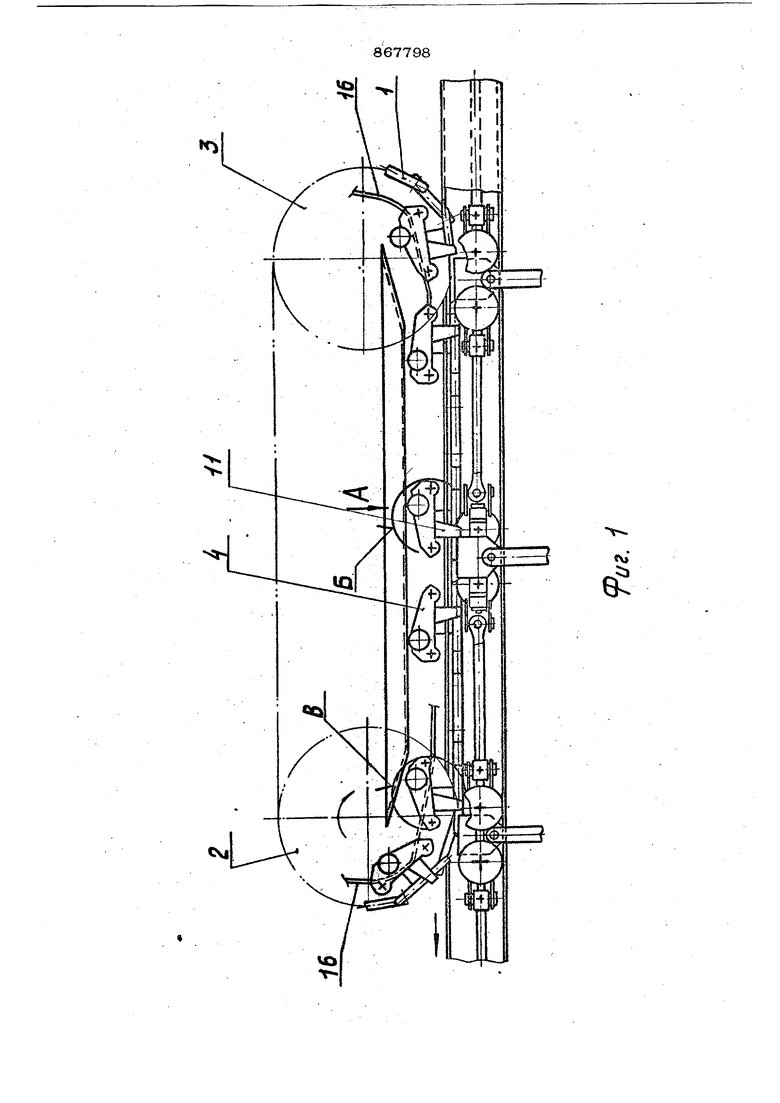
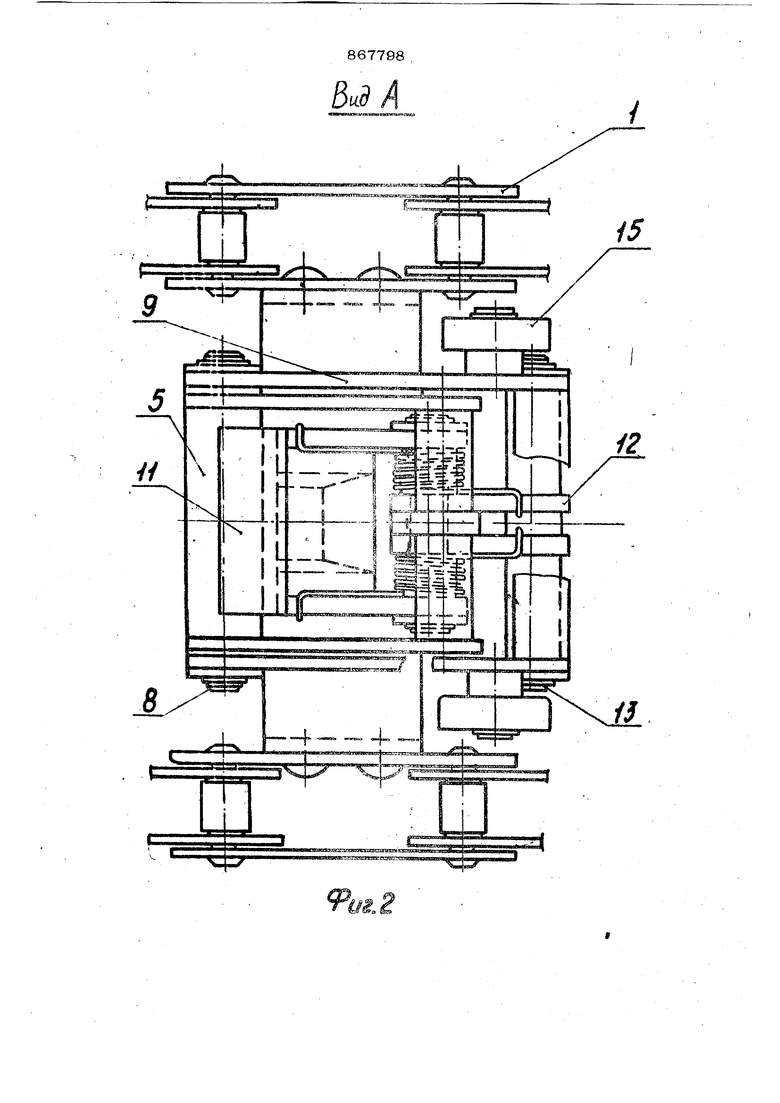
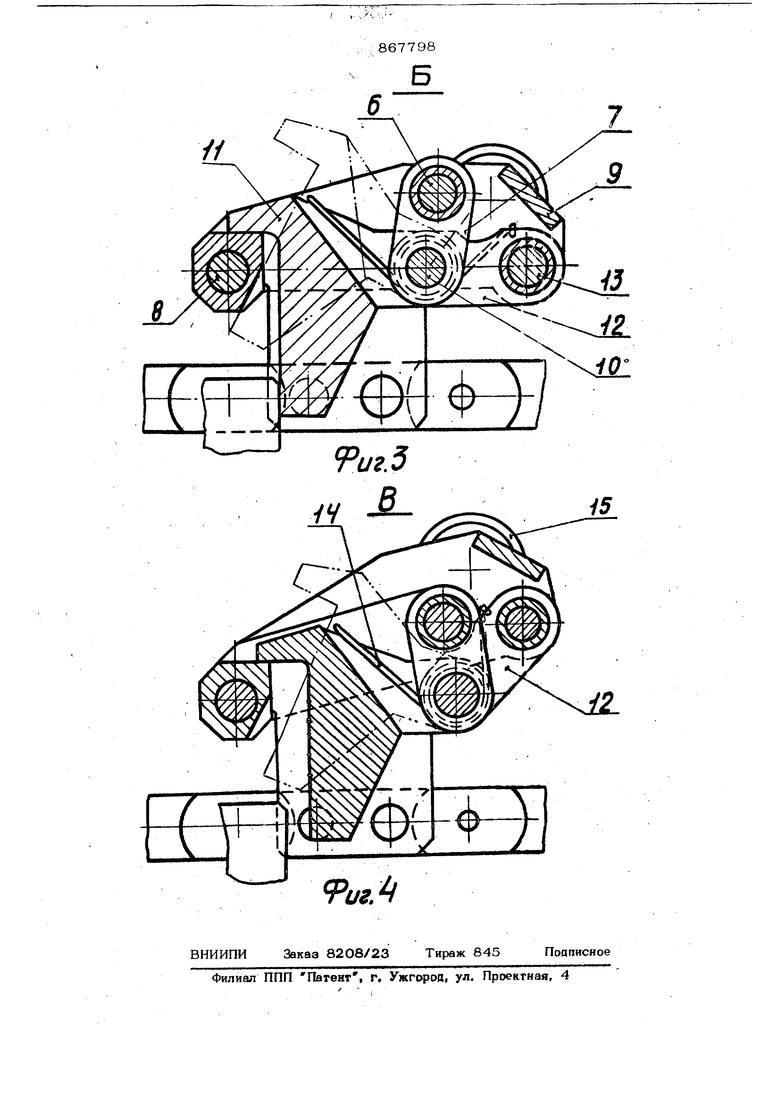
Изобретение относится к подъемно- транспортному оборудованию и может быт использовано для привода конвейерных сис тем. Известен гусеничный привод для конвейеров с цепным тяговым органом, включающий приводную цепь с шарн1фно смонтированными на ней кулаками, взаим ад.вйствуюшими со звеньями цепи, .передние я задние ролики, бесконечные криволинейные направляющие, установленные эксцент рично относительно осей концевых звездочек I.. . Наиболее близким к предлагаемым гусеничные приводы конвейеров, включающие огибающие концевые звездочки, бесконечные приводные цепи с закрепленными ва них подпружиненными кулаками, взашмк действующими с упорами конвейера я роликами, взаимодействукшими с кошфами УВ известных гусеничных приводах не 1федусматрнвается плавное зацепление ку лаками привода упоров конвейера, кулаки испытывают динамические нагрузки и трение, что снижает срок службы контактирующих поверхностей. Цель изобретения - обеспечение надежности работы гусеничного привода. Поставленная цель достигается тем, что каретка снабжена обоймой, серьгой и тягой, при этом обойма установлена на каретке посредством оси, серьга одним концом ша{жирно установлена на обойме, а другим посредством дополнительной оси Связана с кулаком и тягой, которая шарнкр1ю. срейинена с обоймой. На фиг. I схетлатично изображен гусеничный привод; на фиг. 2 - вид А ва фиг. I} на фиг. 3 - положение Б кулака в рабоч.ей зоне привода на фнг. I; на фиг. 4 - положение В кулака в момент выхода его из зацепления на фиг, I. Гусеничный привод включает приводные цепи I, попарно огибающие приводные 2 и натяжные 3 звездочки. К внутренним пластинам прнвсщных це1ей I жестко крепятся клетки 4, состо|Ящие из корпуса 5, в котором на оси 6 шариирно установлена серьга7, а на оси 8 - обойма 9. На оси Ю серьги 7 шаршфно установлен кулак 11. Ось lO также связана с обоймой 9 посредством тяги 12 установленной в обойме на оси 13. Отно сительно корпуса 5 кулак 11 фиксируется пружиной 14, Снаружи обоймы 9 установлены ролики 15. С целью обеспечения реверсивной работу привода каретки 4 закреплены на при водных цепях попарно. Причем шаг направленных в одну сторону кулаков изменяет свою величину относительно шага упорор тягового органа конвейера от наибольшего значения в момент входа в рабочую зону привода до наименьшего в момент выхода из нее. Гусеничный привод конвейера работает следующим образом. При входе каретки 4 в рабочую зону привода ролики 15, установленные на обойме 9, набегают на копирные направляющие 16; При этом обойма 9 поворачивается на оси .8 и увлекает за собой ось 13, которая через тягу 12 поворачивает вокруг оси 6 Серьгу 7. Серьга 7, связанная осью Ю с кулаком 11, отводит последний в крайнее заднее положение, тем самым увеличивается расс ояние между предыдущим (ведушим тяговый орган кон вейера) и выходящим в рабочую зону кулаком. За счет этого увеличешш шага кулак II, встулакший во взаимодействие с конвейером, подводится к упору тяговог ;0ргана конвейера с зазором. В случае набегания кулака на упор тя1ГОВОГО органа конвейера кулак за счет подпружинивания имеет возможность отклониться и 1фоскользнуть по поверхности упора, не вызывая заклинивания. При выходе каретки 4 из рабочей зоны привода ролики 15 снова входят в контакт с копирами 16, при этом происходит аналогичное описанному выше взаимодействие деталей каретки, однако по ходу движения гфоисходит уменьшение расстояния между кулаками, выходящими из зацепления с последуклцим. За счет этого уменвшвния шага происходит плавная передача тягового усилия на последукгаий кулак и создание гарантированного зазора между тягового органа и выходящим из зацеттления кулаком. Формула изобретения Гусеничный привод койвейера, включающий огибающие концевые звездочки, бесконечные пр1юодные цепи с закрепленными на нигс каретками с подщэужиненными кулаками, взаимодействукяпими с упорами конвейера и ролшсами, .взаимодействующими с копирами, отличающийся тем, что, с целью обеспечения надежности рюботы, каретка снабжена обоймой, с ьгой и тягой, при этом обойма установлена на каретке посредством оси, серьга одним концом шаршфно установлена на обойме, а другим, посредством дополнительной оси, связана с кулаком и тягой, которая шарнярно соединена с обоймой, Источники информации, принятые во внимание при 1.Авторское свидетельство СССР N 275832, кл. В 65 G 23/16, 1968. 2,Патент Великобритании № 1364316, кл. В 8 А, опублик. 1971 (прототип).
«
