I
Изобретение относичся к области автоматики и может быть использовано в системах дистанциоииого автоматизированного управления оборудованием технических средств (ТС), содержащим двухнозициоиные объекты с двумя входами управлени;: для иеревода их в одно из двух рабочих состояний (механизмы, арматуру и т. д.), наиример, в системах уиравления судовыми ТС.
Известны устройства, нредназначеиные для уиравлер1ия об1гектам с двумя рабочими состояниями 1, 2J, содержащие .югические элементы, усилители, элементы задержки, релейные элементы и датчики обратной связи. Однако эти устройства обесиечивают иеревод объекта в одно из двух рабочих состояний ири ностуилении команд, соответствующих этим состояниям, на свой (отдельный) вход или нри ностунленни команд но одиому каналу на один вход. При этом наличие сигиала означает команду на открытие (нуск), а отсутствие сигиала- на закрытие (остановку), т. е. не обесиечивают двухпозицнонное уиравление объектом ири иоследовательном ностунлении кратковремен 1Ь х командных сигналов ио одному каналу передачи команд.
Из известных устройств для уиравлеиия двухнозициоиными объектами (с двумя раоочнми состоящий: ;, з.анрнмер «открыто и «закр1ято - д. арматуры, «нущси и «остановлен - д.1я NicxaHH3MOB) нанболее бл11зкнм по технической сун;ности является устройство |3, которое состоит нз двух усил11телс1, элемента НЕ (инвертора) и двух элементог; «Запрет и ослществляет лиравлеиис дв -хнозииионным об1зектом, сиа;жен1П)1м датчиками обратной связи, которые характеризуют два его состоян 1я - работу и ост;;иов; у или два по.южеиия заropipiio (;рг;ча ;:p :;rryp J (открыто, з;1крыто). llepBbiii вход licpnoro э.гсмеита «Заирсг сос.чпнен с BI,;ходом .чогнчсского )стройства (,) формирования yiipanления, а первый второго элемента «Запрет подключен к выходу инвертора (элемента lib), вход которого соед1111ен с н.ых1Дом ЛУ. Вторь;с (инверсные) BXO;U I -).1е енто1 «Запрет подключены к выхо;L: M соотпотствхк-щих датчиков обргпноГ .яз:;. ыхоль; у;;Сл;ентов «Запрет иодключен1)1 ко входам ус1:.1ите.;ей, выходы которь х c;:e.4i:Hc;ibi со входигими э,:еме11тад:и л: хх;:(;зипиг ииоЧ) оьсхта.
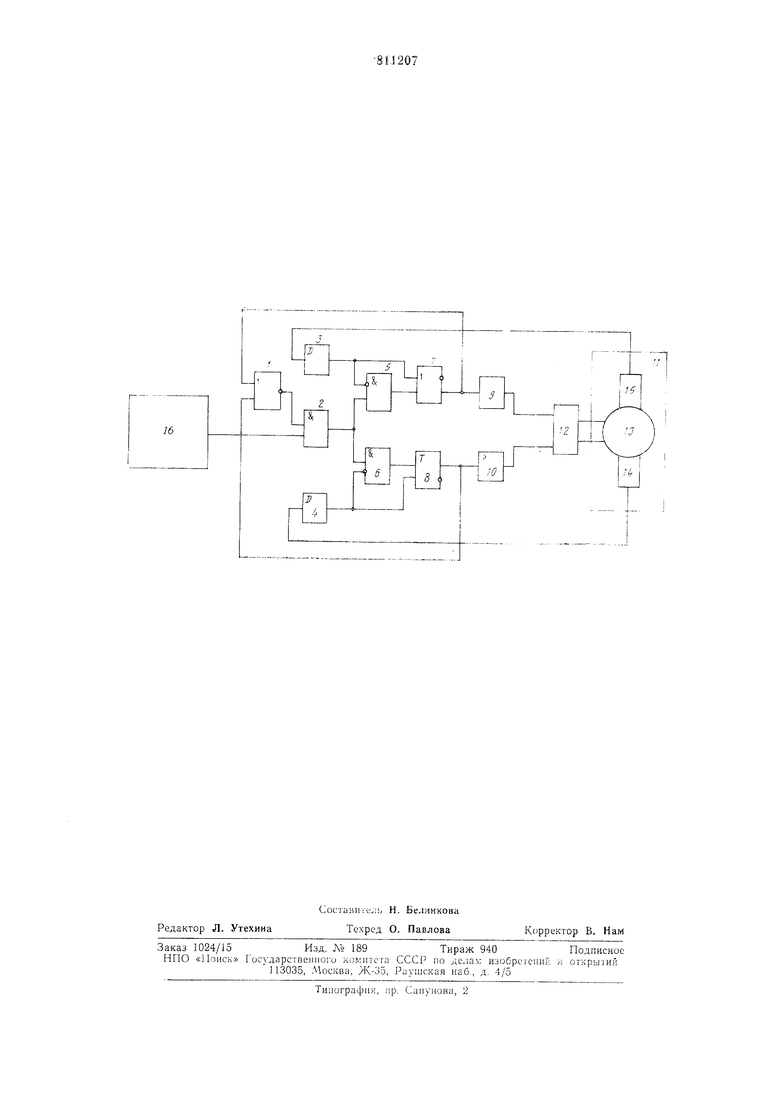
Зуо ттрс)п, О сс:ечнзаст у рау /юнис .xi:;зи I;( Гоьектом ири использо i. одногг 1:ередачи . Нсдсстаток ;;ai;iii4 зак.иочастся втп;, ч Т одно состояние обьекта (как ;рави.1о это раоочее состояние для механизма н открытое состояние для арматуры) 1;оддерживается постоянным поступлением командного сигнала з течение всего периода удержания объекта в данном состоянии. Это время может достигать нескольких часов, В другое (противоио.южное) состояние объект переводится при снятии кома 1дпого сигнала. Таким образом, необходимость д.тительной работы (включенного состояния) объекта требует длительного nociyiiления командного сигнала. Отказ в капа.ле передачи командного сигнала (исчезновение сигнала) приводит к переводу объекса в другое состояние. Вероятность такого отказа увелпчнгикггся с увслпчеп;1см врсмс ни прохождения снгпа-та. Кроме тиго, команда на остановку (закрытие), заключающаяся в снятии сиг1;ала, имее невысокую достоверность, так IVHK по с)изичсск1.) сущности эта ко.манда совпадает с итка.о.х; в канале передачи. Цель изобретения - новыпление надежности устройства за смет у.менылеиия требуемого времени нро.чождення по каналу унрав.тення командного сигнала н введении раз.-шчия по физическому смыслу между командой на закрытие (остановку) п отказом в канале у равленпя, когда этот (jTKa3 приводит к нрекраи;ени1) прохождения комапдн(лч) снгна.ча на открьггне (пуск). Иоставлепная цель достигается тем, чти в устройство д;1я програм.;н()го уирав;1епия двухпознппоппым объекто.х;, содер/ка дес управля1он;пй эле., 11одк:1юче11НЫ11 выходом ко входу нсполннтсльпого .чсхапизма, элемепт И, первьи вход которочо сисдпнен с выходом формировате;1я команд, а второй вход - - с выходом элемента 1-Llll - НЕ и два канала уиравлеиия. состояние из усн;игге;1я, нодсоед1гиен1 огсз выходом ко входам унрав.ляющего элемента и П(х:.;сдовательно c(Jeдинeнныx датч1;ка полоиачп.я. элемента задержки н эле.1е1гта Запрет, н каждый кана;1 управ.ленпя введен Tpiiriep, входы KoTjporo соедипепы с вьгхода.мн э, ементов задержки п Запрет даппо1ч: капала управ.ления, а выход - со входом уснлгггеля данного кана.ла унравления п со в(.)Д()м элемента ИЛИ - НЕ, а выход элемента И подключен ко второму входу элемента Запрет каждого канала управления. Схема устройства показапа па чертеже. Oiio содержит э.лемент ILIII - ИК 1. элемент И 2, элементы 3 -6, элс,1епт1)1 Запрет, триггеры 7, 8, усилители 9, 10. Дву,хнознцпонный объект 11, управ.тенне которым оеуществляет устройство, выполнен с механической памятью заданного положения и состоит из управляющего элемента 12 (усилителя-преобразователя или магнитного нускателя), иснолнительного механизма 13 и датчиков положення 14 н 15 (датчики открытого положения 14 и датчика закрытого положения 15). Входными элементами об1лкта 11 служат э.;ектромагниты (или электромехапиче;кие реле пускагеля), cooтвc;cтз юiuнe оабочил: положениям и6ъск:-а. открыто и закрыто. Кроме TOJ4.1, устр(як:тв(. со:;ер;-1Л:т ф:;рм;1роЗсГге.1Ь киманд ib. стоойгтя. D;iujif.:CT с,:ед |;лп- м иби;.1 ii качеств-. исх:.Д;() сост;;:; ;:;;- :. з,;1крыг)е ri.; ;i;iie i/ubCKTa, Н(;гда па iii ixo;i,c ф{,))ва ie,ii: I о ; ; 1Л1апдный cniTia.i oivyTciByiiT, а па их(;ды лемент.;в 5 и 7 плтупает с1Ппал о; датчика 15 через э;1емеп; 3. с, к.1О; ател1)Ии опиалы на nnixo iax э.1емеп ;(;i 2, 5, б. триперов 7 и Ь .:. усилите,;eii У ): Л; будут итсуicTBoBan.,. (Л1гна:1 бхдет носгупать липл с вi.,ixcJДa э,1сл1спта . H,j BTopoii вx(JД элемспта 2. След(; за;сл1И1.1. nj}n nocTyi;.,ieHnn К(.мапдпоги сигнала c/i формирователя 16 i;;; ;1ерь;.,и iixo... /iCAieni .i 2 с еги выхода иосгупи сигпа:: па вх;;ды jJieMCiiTOB о и б. О,(; н;: BI), xcvie б-,(,Ч сф1.;рлЛ1р(Ва; ClOJi;i,i :.,i:,;-,i V . i la ьыхо;.1е элелспча ,,лпал riy,;er oiсу .стБовать, так как па ciij Ии))ерси:;л; Б.(;Д писгунаст сп1Ч1ал i; 1 ылида ;;е,:сп:а 3. 11исгупаюпи1Й от э:;СМ1..1Г1 а (: па :ер1;ь;и вхи,; Tpinncpa о ciirna.i перев ;,,;: г eio в хчгиич :iu)e состоиппе, i:pi, ь( сигнал iia вьи Х(;,;с триггера в иа::- iiennjcM сих);.1;яст;. s; ne.i/iBiicnMo (;Т 1;алпч1Г: СИп:;,;. иа с; о ;:еовчм iixo.i,e. Выхид ои cnina.i ijiiiirijpa h п;/с пас: иа вх(;д элемеита i. При эТ1л; иа ;И,,е Эк.си эле:, епга и i:a вых(;.,ах элел:с1ггов 2 п и с11ГИ1: :л .iaKjT. 1.,,1 дивг;те,, MJiniiMa.jbb ая дл) 1с;л;Н ;С1;. Ич ст и:лспия кома1Г;1кио сгиналс: ит фор.;иривате,л1 16 Д1,:ли-:па быть ис меисе л;;.рииги времеии сраба 1ыв;;; ия элемопив 1, о и триггера а. Д1КЛ5рсмсПпо B.jixi-.jKbi 1иипал пт трн гера S чере:- усн::п1сл;| lU иис; ;:ае; 11аэлелчНТ : 12 ;i пачиигст :1ср in.cin 1Ъ (б:)ект i; cijCTonnLie «iJ;;- иситкры; ;;;-). то, ме хапизм ,10 Lia-innaci i,л ходить (JT ио,ло/кения -;-закр; гго;, исчезает .или;;, tj6)a :И1,,И от датчика 1 о, ). с, JH:с,п:(;т С1ич1ал иа инверспом входе э;1С 1сита 5 и ir, иром входе грпггера 7, Однако ихлевис зиачсише выход;1ь;х си1па;1ов у э кмеик ь иродо.жает сохраняться, la;-, как к ЭТСА;) времени си1Т1ал на иервсм (i.pHMoMi )5Х1;де э,;смеита о итс тств им, llijcjie ИОЛПО1О срабатв;в;л1пя обьекта П сигнал ;,;бр;;тп(,м1 сгяз) oi ,хатчика 14 чере.-: элемеи; i ncicrynaci i:a iiropuii (инверс иь;:) Bxo.i, э,;емеит;; d и .й BXOJ, григ гера 8. 1,лкл.яиис 5лс :снта 6 при этим пе л:с :яетс ;, raiv как сиг,ча;1 i;a его первом вх:|де уже (,)1су;ст1,(ии:л, а {риггер 8 иеревол1:Тся в другие y,;i(jB4HB(je состояние, Jipif котором ,1 иа В1м.о,с в ,;альнейн1ел1 6y.UTr отсутствоваТ:; исзависн :о (JT того, сохраияется .ли сигиа,: иа его втором входе. Командный сигнал от формирователя 16 к этому моменту должен быть снят. Исчезновение выходного сигнала от триггера 8 приводит к ооесточнванию входа элемента 12, устанавливающегося в нейтральное состояние, а иснолнительный механизм 13 остается в заданном (открытом) положении.
Описание работ элементов ycTpoiicina нри полном цикле перевода объекта 11 из одного ноложения (закрытого) в другое (открытое).
После исчезновения выходного сигнала триггера 8 обеспечено исходное состояние устройства для перевода объекта И из открытого положения в закрытое. Для этого необходима подача следующего кратковременного командного сигнала па вход элемента 2. Работа элементов устро11ства нри переводе объекта И в ноложенпе «Закрыто аналогична описанному выше стой .1ишь разницей, что командный сигнал проходит через элемент 5, триггер 7 и уси.штель 9.
Элс.1енты 6 и 4, установленные в каналах обратной связи, осуществляют задержку на заданное время прохождения сигналов от датчиков 15 и 14 на инверсные входы соответственно элементов о и 6. Это продлевает время поступления комапдпых сигналов на входы элс: 1епта 2 после срабатывания датчиков 14 п 16 и обеспечивает необходимое «дожатие рабоче1о органа псполнптельного механизма 13.
Для пормальпой работы устройства длительпост1 постунлспия ко.мандиого сигнала от фор.1проватс;1я 16 должна быть не менее су.ммарного времени срабатыва1П1я элементов 2, 6, 8 (илн 2, 5, 7) и не более времени перехода объекта 11 из одпого состояние в другое. Практически это время принимается в нределах 1-3 сек.
Предлагае.мое устройство по срав;1ени о с известными позво.тяет повысить паде/кность управлеппя, что обеспечивается уменьшением требуемого времени поступления в устройство управления командного сигнала, а также n3MeHeHne.N физической с ;цности команды на остановку (в прототипе командны; сигна;; на остановку ирнняг в виде отсутствия иапряжения, в предлагае.мом устройстве принят кратковрсменHBiii сигнал в виде по.минальпого зпачения напряжения). В ycTpoiicTBc управления при.мепепы стандартные э.1смепты п б.юкп, выпо.шепные па различно э.тементной базе.
Ф о р м у ,1 а и 3 о б р е г е и и я
Щее уПраВЛЯ10 Ц ;;; ЭЛС.СПТ, ОДКЛ1О е :ПЫ1 1
В1лхидом (1 i(;. С :илппте. ьно1-о механиз ;a, э;;емент И. срвыГ1 вход которо;ч)
С выходом (р()р.;роиа КО.,
а второ вход - с выходо.м э.1е.мента 1 Itll - МН, и два ка1;ала управ.1ения, сости щпс из сил 1Теля, 1 одс сдине 1пого выходом ) входам .1як)П1,е1о э.чемента и 1;ос.1едовательно сио,;ппснпых датчпка по:1о -;с1П1я, элемента задержк п э.чсмспта , о т :i 1 ч а lO ц е с с i 1см, , с цел1)1О 1овьипеп; я устро ства, в кажды11 канал -1:ра лс ия внеден триггер,
ХОД1)1 KvlTOporO Ci.C.J iicnb С БЫХОДаМП ЭЛСMC i:o;i задсрж 1 : oi.iipcr .ai;no o рав;1ен я, а вых1)Д со ix)Дo . ) :;(1;:Вле П;я п со входо.м элемента ИЛИ- ill. а Biiixo,, э.чемента И ),клк)чсн ко BTopi м lixoay элемента Запрет ,i;i npaii.. ilcTo4:iHK иифop ;aцпи, 11рппят з1е во экспертизе
1.Авторское свп;1стельство СССР До V303950, кл. G ОоВ 19д|4, 197G.
2.Сб. «Цептра.,к)ва:1:1ое управление суЛ() спсте 1а,п. .Vi.-.I., «Судостроение, 1971), с. 75, рис. 39G.
3.Авторское сви.,стсл11ство СССР lu) заявке 2622878/18-24, кл. G ОЗВ 21/00, 1979 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления самовозвратным исполнительным механизмом | 1980 |
|
SU957175A1 |
| Устройство для моделирования систем массового обслуживания | 1986 |
|
SU1312606A1 |
| Устройство для передачи информации с обратной связью | 1986 |
|
SU1322356A1 |
| Управляющая логическая машина | 1974 |
|
SU539301A1 |
| Устройство для управления двухпозиционным объектом | 1985 |
|
SU1298717A1 |
| Устройство для отображения информации на экране газоразрядной индикаторной панели | 1985 |
|
SU1278829A1 |
| Устройство для контроля параметров садки в методической кольцевой печи | 1985 |
|
SU1310604A1 |
| Устройство для передачи и приема сигналов точного времени | 1985 |
|
SU1290390A1 |
| Устройство для автоматического измерения гидрологических параметров | 1985 |
|
SU1325301A1 |
| Цифровое устройство управления | 1978 |
|
SU813364A1 |