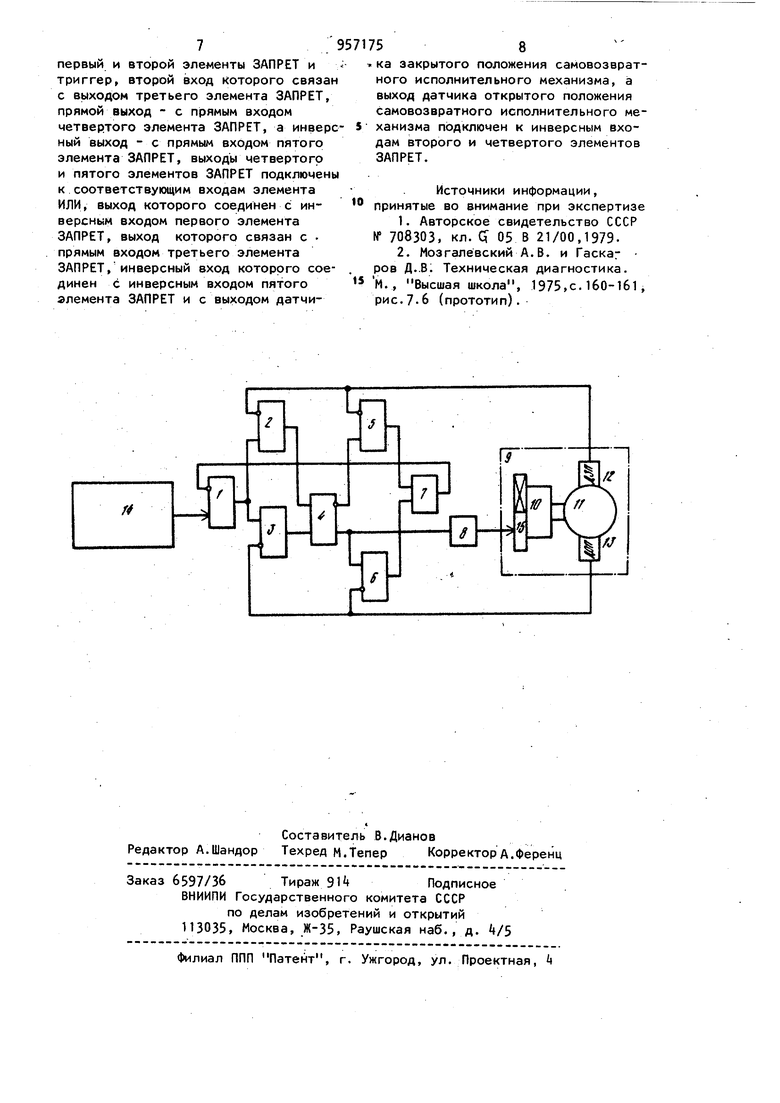
изобретение относится к автоматике и может быть использовано в системах дистанционного автоматизирован ного управления оборудованием технических средств, содержащим самовозвратные исполнительные механизмы с одним входом управления для перевода в одно открытое или закрытое) положение, например, в системах управления судовыми техническими средствами.. Известно устройство для программного управления, содержащее усилите ли, логические элементы, элементы за держки, релейные элементы и датчики положения механизмов 1 . Недостаток данного устройства ограниченные функциональнь1 е возможности вследствие невозможности управления при последов ательном псЗступлении на один вход устройства (по одному каналу передачи) кратковременных командных сигналов на рткрытие исполнительного механизма и возврат механизма в противоположное (исходное) состояние. Наиболее близким техническим решением к предлагаемому является устройство для программного управления, содержащее датчики положения исполнительного механизма и блок формирования команд, подключенный через усилитель к управляющему элементу. Недостатком известного устройства является низкая надежность работы устройства вследствие невозможности запоминания кратковременных команд управления 2. Целью изобретения является.повышение надежности устройства. Поставленная цель достигается тем, что в устройство для программного управления самовозвратным исполнительным механизмом, содержащее блок формирования командных сигналов, усилитель, выход которого подключен к входу управляющего элемента, датчики закрытого и открытого положе„3НИИ самовозвратного исполнительного механизма, элемент ИЛИ и триггер, .введены пяТь элементов ЗАПРЕТ, выход блока формирования командных сигна лов соединен с входом усилителя через последовательно включенные первый и второй элементы ЗАПРЕТ и триггер, второй вход которого связан с выходом третьего элемента ЗАПРЕТ, прямой выход - с прямь1м входом четвертого элемента ЗАПРЕТ, а инверсный выход - .с прямым входом пятого элемента ЗАПРЕТ, вы;х;оды, четвертого и пя того элементов ЗАПРЕТ подключены к соо ветствующим входам элемента ИЛИ, ,выход которого соединен с инверсным входом.первого элемента ЗАПРЕТ, выход которого связан с пpямt.lм входом . третьего элемента ЗАПРЕТ, инверсный вход которого соединен с инверсным входом пятого элемента ЗАПРЁТ и с вы ходом датчика закрытого положения самовозвратного исполнительного механизма, а выход датчика откры того положения самовозвратного ис полнительного механизма подключен к инверсным входам второго и четвертого элементов ЗАПРЕТi На .чертеже представлена блок-схема устройства... Устройство содержит первый 1, вто рой 2 и третий 3 элементы ЗАПРЕТ,триггер , четвертый 5 и пятый 6 элементы ЗАПРЕТ, элемент ИЛИ 7 УРИлитель 8, объект 9/управляющий элемент 10, самовозвратный исполнительный меха.низм 11, датчики закрытого 12 и открытого 13 положения. Устрой ство также содержит блок Il формирования командного сигнала. Входным элементом исполнительного механизма может быть электромагнит 15 электрогидравлического распределителя приво да механизма или электромеханическое реле пускателя электропривода. Устройство работает следующим образом.. В качестве исходного примем закрытое состояние механизма 11,когда на выходе блока 1 командный сигнал отсутствует, а на инверсные входы элементов ЗАПРЕТ 2 и 5 поступает сигнал от датчика 12, вследствие чего выходные сигналы на всех элементах схемы отсутствуют за исключением инверсного выхода триггера k, но на выход элемента-ЗАПРЕТ 5 этот Сигнал не проходит ввиду наличия запрещающего сигнала на его инверс5 . 4 ном входе. Следовательно, при поступлении командного сигнала от блока 1 на прямой вход элемента ЗАПРЕТ 1 с его выхода поступит сигнал на прямые входы элементов ЗАПРЕТ 2 и 3, однако на выходе будет сформирован сигнал только у .элемента 3. На выходе элемента ЗАПРЕТ 2 сигнал будет отсутствовать, так как на его инверсный вход поступает сигнал от датчика 12. . Поступающий от .элемента ЗАПРЕТ 3 на вход триггера k сигнал переводит его в устойчивое состояние, при котором появляется сигнал на прямом выходе триггера и в дальнейшем сохраняется независимо от .наличия сигнала на этом -его входе. При этом сигнал на инверсном выходе триггера исчезнет.После срабатывания триггера -командный сигнал от блока 1 можно снимать. Выходной сигнал, триггера k поступает на прямой вход-элемента ЗАПРЕТ 6, а так как сигнал на его инверсном входе отсутствует, то выходной сигнал этого элемента через элемент ИЛИ 7 поступает на инверсный вход элемента ЗАПРЕТ 1, прекращая тем самым прохождение через него командного сигнала от блока И. Этим завершается переход схемы в устойчивое состояние, соответствующее переводу механизма 11 в открытое положение, Срабатывание механизма 11 обеспечивается поступлением выходного си|- нала от триггера k через усилитель 8 на вход элемента 10. Как только ме ханизм 11 начинает отходить от положения Закрыто исчезает сигнал обратной связи от датчика 12, т.е. исчезает сигнал на инверсном входе элементов ЗАПРЕТ 2 и 5, но к этому времени на прямых входах элементов сигнала уже нет, поэтому на выходе этих элементов сигнала также нет, Указанное состояние схемы сохра- няется в течение всего времени перехода механизма из положения Закрыто в положение Открыто. После полного срабатывания механизма 9 сигнал обратной связи от датчика 13 поступает на инверсный вход элементов ЗАПРЕТ 3 и 6. При э-гом состояние элемента 3 не меняетс.я, так как к этому времени команд ный сигнал от блока , поступающий но вход элемента 1, уже должен быть снят и, следовательно, сигнал на прямой вход.элемента 3 не будет поступать, триггер 4 сохраняет заданное состояние, а выходной сигнал элемента 6 исчезает. Выходной сигнал триггера. 4, поступающий ч рез усилитель 8 на вход элемента 1 удерживает самовозвратный механизм в положении Открыто. . С поступлением сигнала от датчика 13 схема приводится в состояние, обеспечивающее прием командного сиг нала на возврат механизма 11 в исходное (закрытое) положение. , По команде на возврат механизма 11 в исходное состояние происходит следующее срабатывание элементов ус ройства. Командный сигнал от блока 1 проходит через элемент ЗАПРЕТ. 1- (звиду отсутствия запре.щающего сигнала на его инверсном входе) и поступает на прямые входы элементов ЗАПРЕТ 2 и 3. Однако на выходе будет сформирован сигнал только у элемента 2 (у элемента 3 присутствует запрещающий сигнал на инверсном входе). . .Поступающий от элемента 2 на вход триггера сигнал переводит его в устойчивое состояние, при котором появляется сигнал на.его инверсном выходе и в дальнейшем сохраняется независимо от наличия сиг нала на этом его входе. При этом сигнал на прямом выходе триггера снимается. После срабатывания триггера k командный сигнал от .блока 1 можно снимать. Сигнал от инверсного выхода триггера k проходит через эл мент ЗАПРЕТ 5 {ввиду отсутствия запрещающего сигнала на его инверсном входе) и через элемент ИЛИ 7 посту пает на инверсный вход элемента ЗАПРЕТ 1, прекращая тем самым прохождение через-него командного сигнала от блока . Усилитель 8, после исчезновения сигнала на прямом выходе триггера , снимает питание с входа элемента 10, тем самым обеспечивается возвра механизма в исходное (закрытое) сое тояние. Отход механизма от положе иия Открыто приводит к снятию сигнала, поступающего от датчика 13 на инверсные входы элементов 3 и 6, но состояние выходов этих элементов не меняется ввиду отсутствия сигнала на их прямом, входе. До прихода механизма 11 в закрытое положение сост яние всей схемы также не меняется. После полного срабатывания механизма 11 сигнал от датчика 12 поступает на инверсные входы элементои ЗАПРЕТ 2 и 5. При этом состояние элемента 2 не меняется, так как к этому времени сигнал на его первом входе уже должен отсутствовать, три1 гер сохраняет заданное состояние, выходной сигнал элемента 5 исчезает. С поступлением сигнала от датчика. 12 схема приводится в состояние, при котором обеспечивается прием следующего командного сигнала на перевод механизма 11 в открытое положение. Для нормальной работы устройства длительность поступления командного сигнала .от блока It должна быть не менее суммарного времени срабатывания элементов 1,2 и + (или 1 ,3 и k) и не более времени перехода механизма 11 из одного состояния в другое. Практически, длительность сигнал.а принимается равной 1-3 сек. Предлагаемое устройство, по сравнению с известными, позволяет повысить надежность управления, что достигается за счет уменьшения требуемого времени поступления в устройство управления командного сигнала,. а также изменения физической сущности команды на возврат механизма, в исходное (закрытоеJ состояние.Если в известном устройстве командный сигнал на возврат механизма, поступающий в устройство от блока команд, принят в виде отсутствия напряжения, в этом устройстве - кратковременный сигнал в виде номинального значения напряжения. - . Формула изобретения Устройство для программного управления самовозвратным исполнительным механизмом, содержащее блок формирования командных сигналов, усилитель, выход которого подключен к входу управляющего элемента, датчики закрытого и открытого положений самовозвратного исполнительного механизма, элемент ИЛИ и триггер, отличающееся тем, что, с целью повышения.надежности устройства, в него введены пять элементов ЗАПРЕТ, выход блока формирования командных сигналов соединен с входом усилитепя через последовательно включенные 7957 первый и второй элементы ЗАПРЕТ и триггер, второй вход которого связан с выходом третьего элемента ЗАПРЕТ, прямой выход - с прямым входом четвертого элемента ЗАПРЕТ, а инверс- 5 ный выход - с прямым входом пятого элемента ЗАПРЕТ, выходы четвертого и пятого элементов ЗАПРЕТ подключены к соответствующим входам элемента ИЛИ, выход которого соединен с ин- версным входом первого элемента ЗАПРЕТ, выход которого связан с прямым входом третьего элемента ЗАПРЕТ,инверсный вход которого соединен с инверсным входом пятого элемента ЗАПРЕТ и с выходом датчи58ка закрытого положения самовозвратного исполнительного механизма, а выход датчика открытого положения самовозвратного исполнительного механизма подключен к инверсным входам второго и четвертого элементов ЗАПРЕТ. Источники информации, принятые во вну)мание при экспертизе 1.Авторское свидетельство СССР № 708303, кл. С 05 В 21/00,1979. 2.Мозгалевский А.В. и Гаскаг ров Д..В. Техническая диагностика. М., Высшая школа, 1975,с.1бО-1б1 , рис.7.6 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмом намотки | 1978 |
|
SU716959A1 |
| Устройство для сигнализации состояния двухиозиционного исполнительного механизма | 1979 |
|
SU858046A2 |
| Устройство для функционального контроля системы автоматизированного управления самовозвратными механизмами | 1977 |
|
SU708312A1 |
| Система автоматического управления роторным конвейером | 1986 |
|
SU1361506A1 |
| УСТАНОВКА ДЛЯ ХИМИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ НА ПОДВЕСКАХ | 1990 |
|
SU1820637A1 |
| Устройство для программногоупРАВлЕНия дВуХпОзициОННыМОб'ЕКТОМ | 1979 |
|
SU811207A1 |
| Устройство для сигнализации состояния исполнительных механизмов | 1987 |
|
SU1453430A1 |
| Устройство для автоматической остановки изделия | 1980 |
|
SU950458A1 |
| Устройство для программного управления подъемно-транспортным механизмом | 1984 |
|
SU1166063A2 |
| Устройство для сигнализации состояния исполнительного механизма | 1982 |
|
SU1076932A1 |
Ln U
/
г
I
J
