12
Изобретение относится к области автоматики и может быть использовано в системах дистанциодного управления оборудованием технических средств, содержащим двухпозицион- ные объекты с двумя входами управления для перевода их в одно из двух рабочих состояний (механизмы, задвижки, заслонки, шиберы и т.д.) например , в системах управления матери- альными потоками в промышленности строительных материалов.
Целью изобретения является обеспечение воздействия на исполнительный механизм в переходном режиме и повышение функциональной надежности устройства.
На фиг, 1 представлена структурная схема устройства для управления двухпозиционным объектом5 на фиг„2 - функциональная схема формирователя команд; на фиг. 3- функциональная схема распределителя канальных сигналов; на фиг. 4 - функциональная схема блока начальной установки.
Устройство содержит формирователь 1 команд, распределитель 2 канальных сигналов,блок 3 начальной установки, элементы 4 и 5 Запрета, элементы 6 и 7 задержки, усилители 8 и 9, управляющий элемент 10 (усилитель- преобразователь или магнитный пускатель) , двухпозиционный объект 11.
Двухпозиционный объект 11 выполне с механической памятью заданного по- ложения и состоит из исполнительного .механизма 12 и датчиков 13 и 14 положения (датчика 13 открытого положения и датчика 14 закрытого положения Входными элементами объекта 11 слу- жат электромагниты (или электромеха-, нич ескиё реле пускателя), соответствующие двум оабочим положениям объекта: Открыто и Закрыто.
Формирователь 1 команд состоит из переключателя 15, неподвижные контакты которого через резисторы 16 и 17 подключены к источнику напряжения и ко входам гасителя дребезга, выпол ненного на элементах И-НЕ 18 и 19.
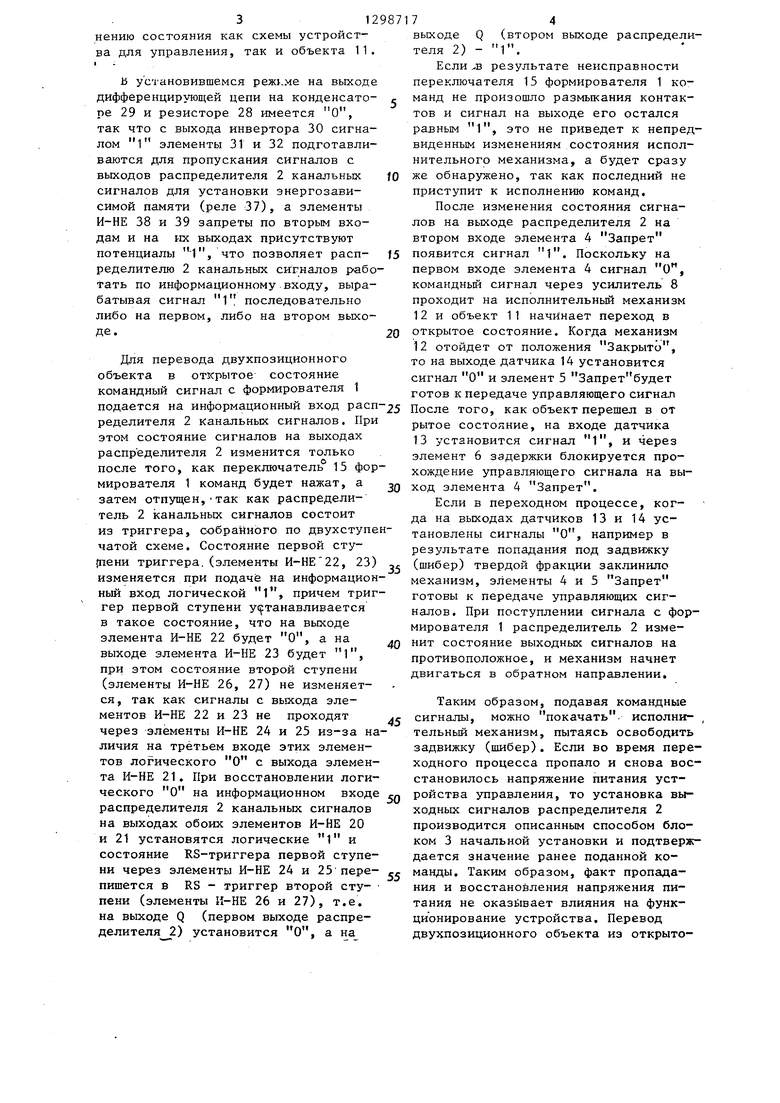
Распределитель 2 канальных сигналов может быть реализирован на элементах И-НЕ 20-27, соединенных по схеме двухтактного триггера,
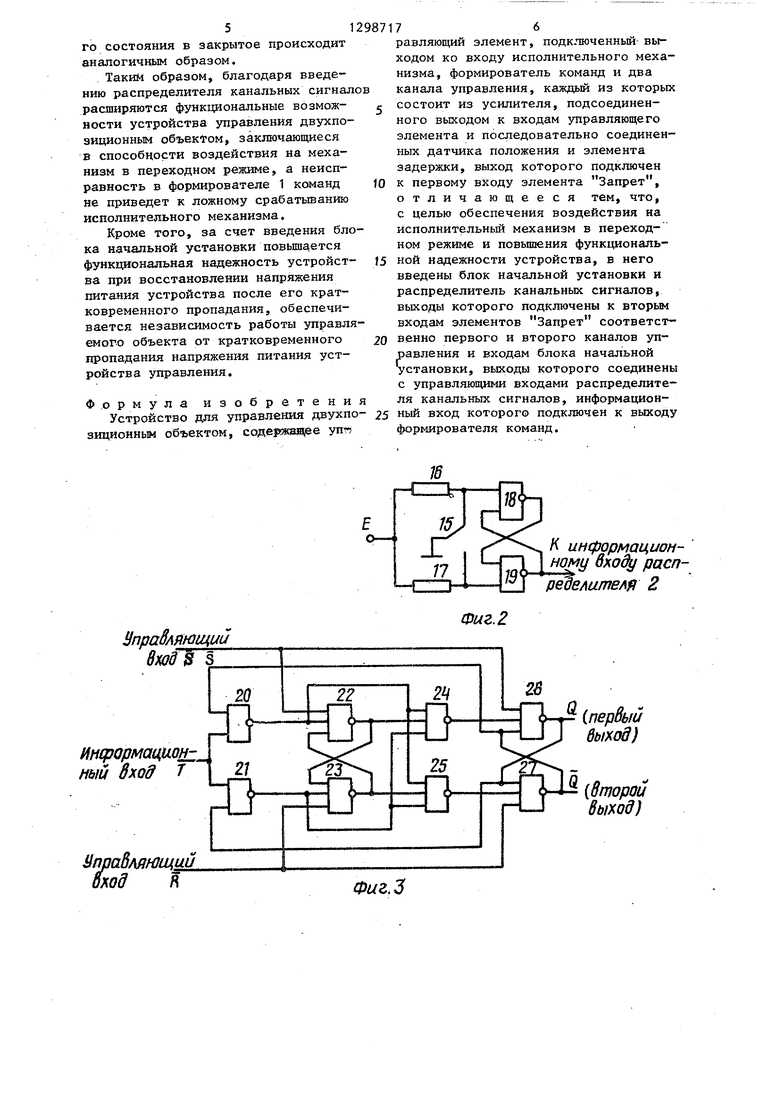
Блок 3 начальной установки содержит дифференцирующую цепочку из резистора 28 и конденсатора 29, а также инвертор 30, элементы И-НЕ 31 и
172
32, дифференцирующие цепи, в качестве которых применены конденсаторы 33 34 и резисторы 35, 36, установочные обмотки 37.1 и 37.2 поляризованного реле 37, контакт 37.3 которого используется как элемент энергонезависимой памяти состояния распределителя 2 канальных сигналов, элементы И-НЕ 38 и 39, включенные по схеме гасителя дребезга, усилительные элементы 40 и 41, резисторы 42 и 43, диоды 44 и 45.
Устройство работает следунмцим образом.
Пусть в качестве исходного состояния принято закрытое состояние объета 11, когда на выходе формирователя 1 командный сигнал отсутствует, а на первый вход элементы 5 Запрет поступает сигнал от датчика 14 через элемент 7 задержки.
На второй вход элемента 5 поступает сигнал с первого выхода распределителя 2 канальных сигналов. Сигналы на выходах элементов 6, 4, 5, 8,9 и 10 отсутствуют,
I
Если при этом пропадает напряжени питания устройства, то положение исполнительного элемента не изменится, так как управляющий элемент 10, приняв команду, самоблокируется. При восстановлении напряжения питания через ди4)ференцирующую цепочку, состоящую из конденсатора 29 и резистора 28, подается логическая 1 на вход инвертора 30 и вторые входы элементов И-НЕ 38 и 39 блока 3 начальной установки, на первые входы которых поступают сигналы с контатов поляризованного реле 37, соответствующие последнему перед пропаданием напряжения питания состоянию .. распределителя 2 канальных сигналов, Сигналами с выходов этих элементов распределитель 2 канальных сигналов устанавливается в то состояние, которое было задано последним управ- сигналом, т.е. сигнал 1.будет на первом выходе. Потенциалом О с выхода инвертора 30 блокируется передача на выход элементов И-НЕ 31 и 32 сигналов с выходов распределителя 2 канальных сигналов через дифференцирующие цепи на конденсаторах 33, 34 и резисторах 36, 35, Таким образом, пропадание и восстановление напряжения питания устройства управления не приведет к изме312
нению состояния как схемы устройства для управления, так и объекта 11.
I :
li установившемся режиме на выходе дифференцирующей цепи на конденсато- ре 29 и резисторе 28 имеется О, так что с выхода инвертора 30 сигналом 1 элементы 31 и 32 подготавливаются для пропускания сигналов с выходов распределителя 2 канальных сигналов для установки энергозависимой памяти (реле 37), а элементы И-НЕ 38 и 39 запреты по вторым входам и на их выходах присутствуют потенциалы 1, что позволяет расп- ределителю 2 канальных сигналов работать по информационному.входу, вырабатывая сигнал 1 последовательно либо на первом, либо на втором выхо- Де.
Для перевода двухпозиционного объекта в открытое состояние командный сигнал с формирователя 1 подается на информационный вход расп ределителя 2 канальных сигналов. При этом состояние сигналов на выходах распределителя 2 изменится только после того, как переключатель 15 формирователя 1 команд будет нажат, а затем отпущен,так как распределитель 2 канальных сигналов состоит из триггера, собранного по двухступечатой схеме. Состояние первой сту- |пени триггера.(элементы И-НЕ 22, 23) изменяется при подаче на информационный вход логической 1, причем триггер первой ступени у танавливается в такое состояние, что на выходе элемента И-НЕ 22 будет О, а на выходе элемента И-НЕ 23 будет 1, при этом состояние второй ступени (элементы И-НЕ 26, 27) не изменяется, так как сигналы с выхода элементов И-НЕ 22 и 23 не проходят через элементы И-НЕ 24 и 25 из-за наличия на третьем входе этих элементов логического О с выхода элемента И-НЕ 21. При восстановлении логического О на информационном входе распределителя 2 канальных сигналов на выходах обоих элементов И-НЕ 20 и 21 установятся логические 1 и состояние RS-триггера первой ступени через элементы И-НЕ 24 и 25 пере- пишется в RS - триггер второй сту- пени (элементы И-НЕ 26 и 27), т.е. на выходе Q (первом выходе распределителя) установится О, а на
74
выходе Q (втором выходе распределиО П 1 П
теля 2) - 1 .
Если в результате неисправности переключателя 15 формирователя 1 команд не произошло размыкания контактов и сигнал на выходе его остался равным 1, это не приведет к непредвиденным изменениям состояния исполнительного механизма, а будет сразу же обнаружено, так как последний не приступит к исполнению команд.
После изменения состояния сигналов на выходе распределителя 2 на втором входе элемента 4 Запрет появится сигнал 1. Поскольку на первом входе элемента 4 сигнал О, командньй сигнал через усилитель 8 проходит на исполнительный механизм 12 и объект 11 начинает переход в открытое состояние. Когда механизм
12отойдет от положения Закрыто, то на выходе датчика 14 установится сигнал О и элемент 5 Запрет будет готов к передаче управляющего сигна.п После того, как объект перешел в от рытое состояние, на входе датчика
13установится сигнал 1, и через элемент 6 задержки блокируется прохождение управляющего сигнала на выход элемента 4 Запрет.
Если в переходном процессе, когда на выходах датчиков 13 и 14 установлены сигналы О, например в результате попадания под задвижку (шибер) твердой фракции заклинило механизм, элементы 4 и 5 Запрет готовы к передаче управляющих сигналов. При поступлении сигнала с формирователя 1 распределитель 2 изменит состояние выходных сигналов на противоположное, и механизм начнет двигаться в обратном направлении.
Таким образом, подавая командные сигналы, можно покачать исполни:- тельный механизм, пытаясь освободить задвижку (шибер). Если во время переходного процесса пропало и снова восстановилось напряжение питания устройства управления, то установка выходных сигналов распределителя 2 производится описанным способом блоком 3 начальной установки и подтверждается значение ранее поданной команды. Таким образом, факт пропадания и восстановления напряжения питания не оказывает влияния на функционирование устройства. Перевод двухпозиционного объекта из открытого состояния в закрытое происходит аналогичным образом.
Таким образом, благодаря введению распределителя канальных сигнало расширяются функпзнональные возможности устройства управления двухпо- зиционным объектом, заключающиеся в способности воздействия на механизм в переходном режиме, а неисправность в формирователе 1 команд не приведет к ложному срабатьюанию исполнительного механизма,
Кроме того, за счет введения блока начальной установки повышается функциональная надежность устройства при восстановлении напряжения питания устройства после его кратковременного пропадания, обеспечивается независимость работы управляемого объекта от кратковременного пропадания напряжения питания устройства управления.
Ф.ормула изобретения Устройство для управления двухпо- зиционным объектом, соде}35кгда е упг)
равляющий элемент, подключенный- выходом ко входу исполнительного механизма, формирователь команд и два канала управления, каждьм из которых
состоит из усилителя, подсоединенного выходом к входам управляющего элемента и последовательно соединенных датчика положения и элемента задержки, выход которого подключен
к первому входу элемента Запрет, отличающееся тем, что, с целью обеспечения воздействия на исполнительный механизм в переходном режиме и повьппения функциональной надежности устройства, в него введены блок начальной установки и распределитель канальных сигналов, выходы которого подключены к вторьм входам элементов Запрет соответственно первого и второго каналов управления и входам блока начальной установки, выходы которого соединены с управляющими входами распределителя канальных сигналов, информационный вход которого подключен к выходу формирователя команд.
К информационному бмду распCM
dH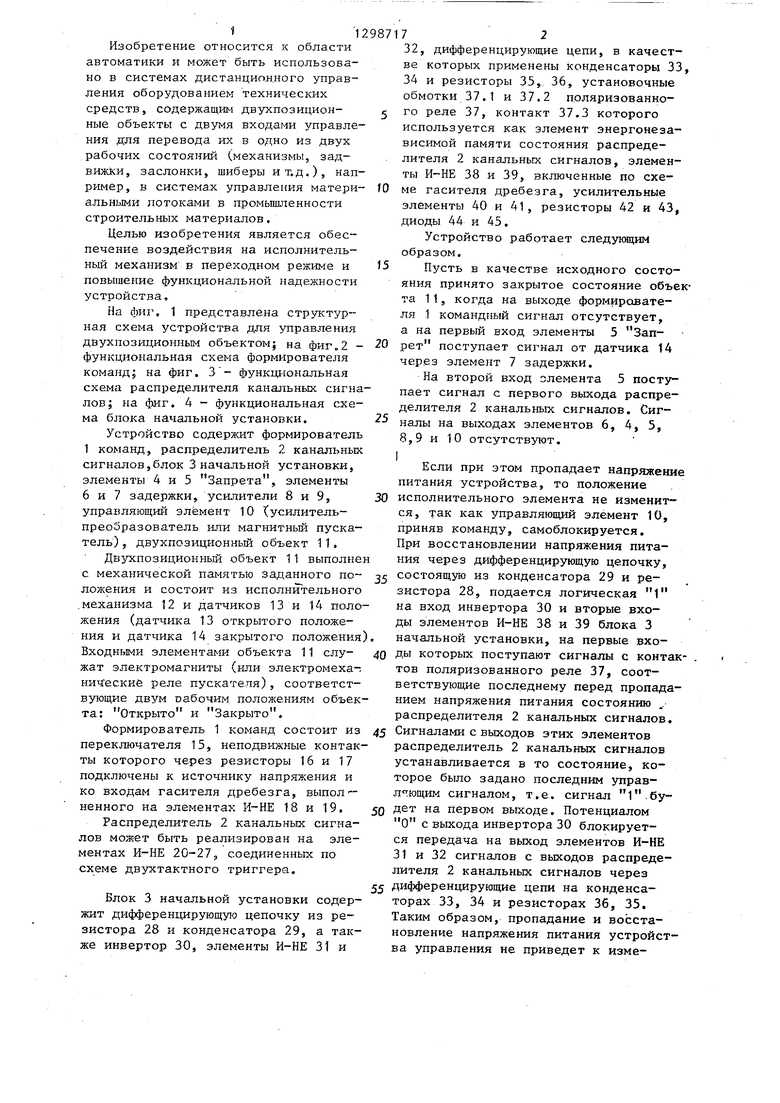
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сигнализации состояния исполнительных механизмов | 1987 |
|
SU1453430A1 |
| Система для передачи и приема дискретной информации | 1988 |
|
SU1564669A1 |
| Система автоматизированного управления зоотехническими объектами | 1978 |
|
SU989535A1 |
| Устройство для приема команд телеуправления | 1987 |
|
SU1441436A1 |
| СИСТЕМА ЦЕНТРАЛИЗОВАННОГО ОПОВЕЩЕНИЯ | 1973 |
|
SU386416A1 |
| Устройство для приема команд телеуправления | 1984 |
|
SU1229791A1 |
| Устройство управления резонансным позиционным механизмом | 1987 |
|
SU1451646A1 |
| Установка для регулирования положения сооружений | 1991 |
|
SU1795000A1 |
| ЭЛЕКТРОННЫЙ ВЫКЛЮЧАТЕЛЬ | 2004 |
|
RU2266613C1 |
| Устройство для программного управления объектами | 1989 |
|
SU1777120A1 |
Изобретение относится к области автоматики и может быть использовано в системах дистанционного управления оборудованием технических средств, содержащим двухпозиционные объекты. Целью изобретения является обеспечение воздействия на исполнительный механизм в переходном режиме и повышение функциональной надежности устройства. В устройство введены распределитель 2 канальных сигналов и блок 3 начальной установки. Введение блока 3 начальной установки и распределителя 2 канальных сигналов позволяет при кратковременном пропадании и восстановлении напряжения питания устанавливать устройство в состояние, соответстую- щее последнему поданному командному сигналу, исключить влияние длительности командного сигнала на работу устройства и обеспечивает возможность воздействия на объект (управления объектом) во время переходного режима. 4 ил. i (Л Фиг.1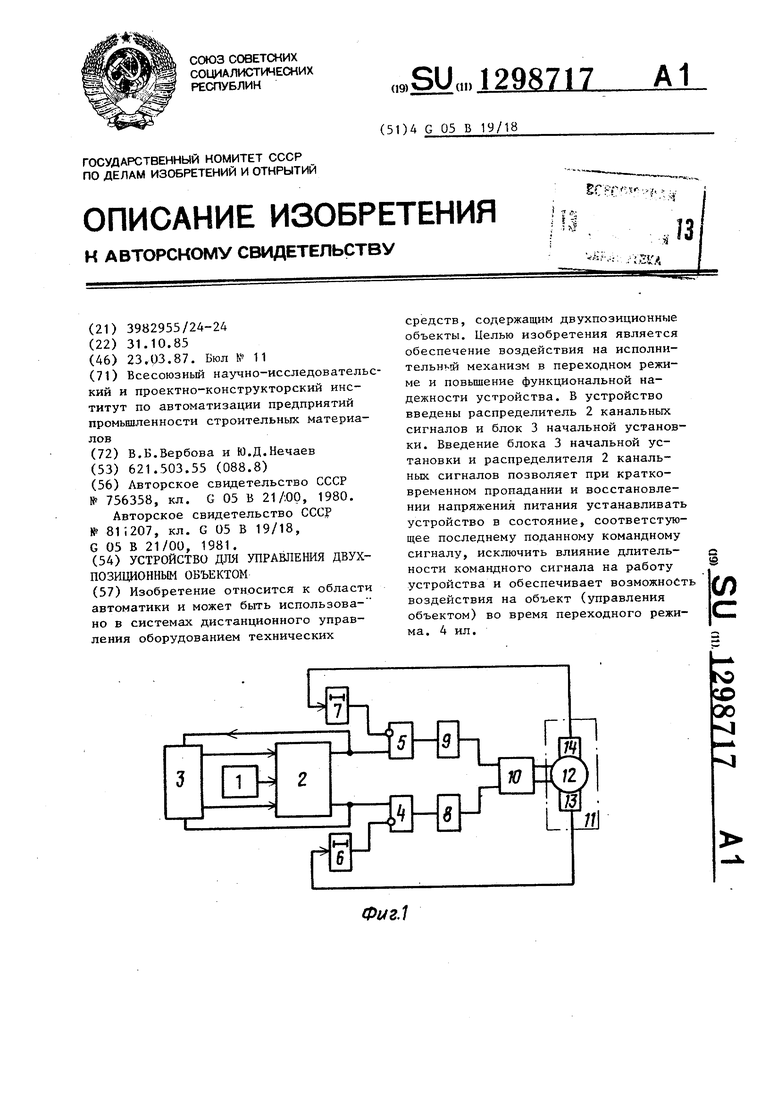
Редактор Н.Егорова
Составитель А.Исправникова
Техред М, Ходанич Корректор Г, Решетник
Заказ 888/50 Тираж 864Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Авторское свидетельство СССР № 756358, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Горный компас | 0 |
|
SU81A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
