хронизации подключены к входам логического распределителя, к другим входам которого подключены выходы релейного элемента, источника пускового сигнала и по два выхода с блока ввода - вывода и с датчика наличия и направления вращения, причем вход блока ввода - вывода подключен к выходу источника задающего напряжения, вход датчика наличия и направления вращения подключен к тахогенератору, а каждый из выходов логического распределителя связан через согласующий элемент с соответствующим тиристором встречно-параллельных мостов. Сущность изобретения поясняется чертежами, где на фиг. 1 представлена блок-схема устройства; на фиг. 2 -диаграммы, поясняющие работу устройства. Устройство содержит двигатель 1 незасимого возбуждения, якорь которого подключен к сети переменного тока через два встречно-параллельных моста 2 и 3, вход которых подсоединен через согласующий трансформатор 4 к трехфазному индуктивно-емкостному преобразователю 5; релейный элемент 6, вход которого соединен с выходом сумматора 7, к одному выходу последнего подключен источник задающего напряжения 8, а к другому - тахогенератор 9; три датчика 10-12 тока, включенные по одному в линейные провода между выходом согласующего трансформатора 4 и входом двух встречно-параллельных тиристорных мостов. Выход каждого из датчиков 10-12 соединен с токовыми нуль-органами 13-18, выходы которых заведены на блок 19 синхронизации, а выходы последнего подключены к входам логического распределителя 20, к другим входам которого подключены выходы релейного элемента 6, источник 21 пускового сигнала и по два выхода с блока 22ввода - вывода и с датчика 23 наличия и направления вращения, а выходы логического распределителя - через согласующие элементы 24-35. Устройство работает следующим образом. Сигнал обратной связи по скорости бтг снимается с тахогенератора 9 и подается на элемент 7 сравнения (сумматор), куда также поступает аналоговый сигнал от источника 8, задающего напряжения Сигнал с выхода сумматора 7 AL поступает на вход релейного элемента 6. Датчик наличия и направления вращения представляет собой два разнополярных по входу нульоргана, реагирующих соответственно на положительное и отрицательное напряжения, поступающие с тахогенератора 9. Датчик 23вырабатывает сигналы К к R, комбинация которых в соответствии с табл. 1 позволяет контролировать как вращение двигателя, так и направление этого вращения. к 22 ввода предназначен для преобрая аналогового сигнала бз в сигналы , при помощи которых закодированы ие команды управления в соответсттабл. 2. Таблица 1 Таблица 2 к 20 является логическим распределии представляет собой комбинационогическую схему, вырабатывающую ые сигналы Wi-W и W/-We, поые через согласующие элементы 24- управляющие электроды соответствутиристоров. Минимизированные лоие уравнения выходных сигналов расителя 20 имеют вид: W X,N() W, X, уусмл-V/) W, X,N() W, X, W(MK /R)/ZiyP W,X( W,X,N(MK /R}VZ VP W - X,MiNR /K)J X( W3 X, M() WA X,M() W, X,M() W,X,M() их уравнениях X, Xz, Хз - сигналы низации, реализуемые блоком 20
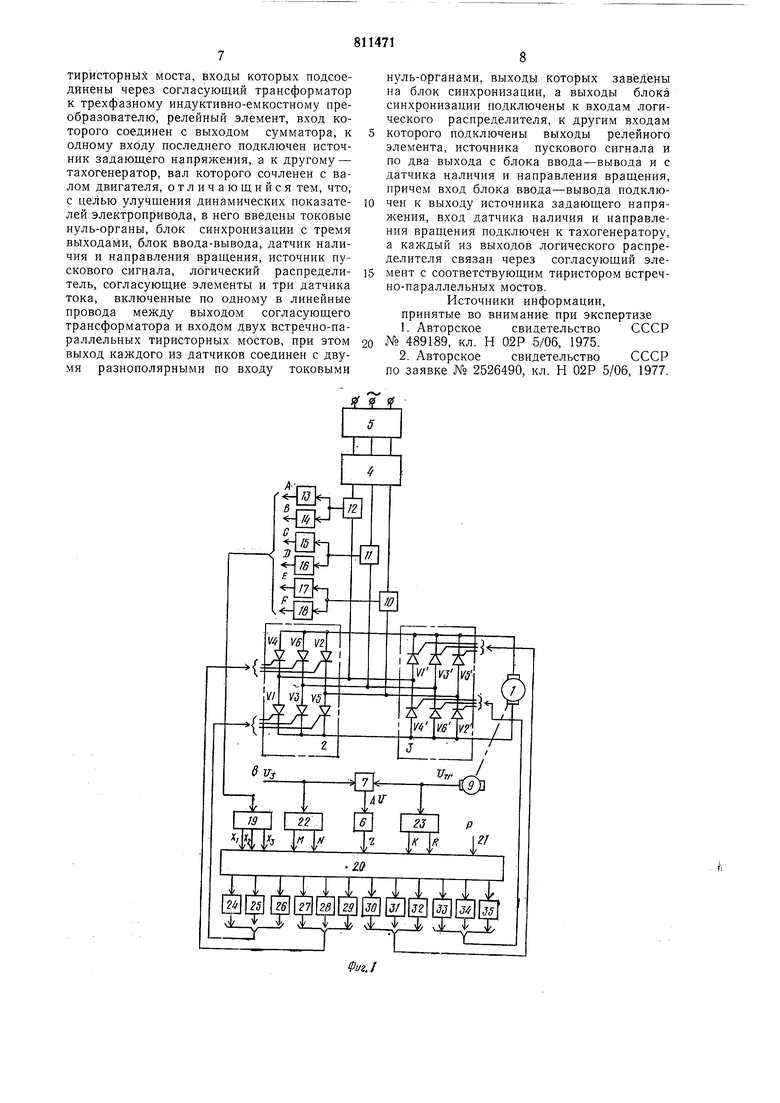
синхронизации в соответствии с уравнениями:
X, ЛО; X, CF; X, - ВЁ.
Временные диаграммы, иллюстрирующие выделение сигналов Xi-Хз, приведены на фиг. 2, где относительно фазных наиряжений вторичной обмотки трансформатора Ua, Us и Uc изображены выходные сигналы токовых нуль-органов 13-18 (А, В, С, D, Е, F) для случая, когда ток проводит каждый вентиль в течение 120 эл. град. Для возможности формирования сигналов синхронизации Xi-Хз при угле проводимости, равном 180 эл. град., что наблюдается при закороченном выходе индуктивно-емкостного преобразователя, токовые нуль-органы 13-18 должны иметь искусственную зону нечувствительности, составляющую не менее 1-2 эл. град. Основное назначение сигналов Xi-Хз состоит в обязательном отпирании всех вентилей - в точках естественного открывания для обеспечения непрерывного потребления тока индуктивно-емкостного преобразователя.
Перед подключением токопараметрического преобразователя к сети на распределитель 20 подается одноразовый кратковременный пусковой сигнал Р от источника 21, который после подключения преобразователя через 50-100 мс может быть снят, так как устройство начнет управляться сигналами, поступающими с токовых нуль-органов.
Если внешняя команда управления была «Стоп, то распределитель 20 импульсов обеспечит работу вентилей анодной группы (V2, Vi; Ve) моста 2 и вентилей катодной группы (Vl; УЗ; Vs) моста 3. При включении упомянутых вентилей образуются короткозамкнутые контуры, благодаря которым произойдет закорачивание выхода индуктивно-емкостного преобразователя и создание режима холостого хода нагрузки двигателя, когда ток в якоре отсутствует.
По команде «Пуск вперед появляется аналоговый сигнал напряжения задания скорости бз, а также сигналы и . Сигналом Us релейный элемент 6 устанавливается в состояние, при котором на его выходе вырабатывается сигнал . При такой комбинации сигналов М, N и Z распределитель импульсов выдает сигналы управления лишь на вентили моста 2, при этом указанный мост начинает работать в выпрямительном режиме и создает в якоре двигателя ток положительной полярности, равный, например, 2, 5 /яп (/ян - номинальный ток якоря). Двигатель разгоняется с постоянным ускорением, так как источник тока автоматически поддерживает в якоре неизменное среднее значение выпрямленного тока. По мере разгона двигателя напряжение тахогенератора Утг сравнивается по абсолютной величине с t/з и при сигнале на выходе с мматора, равном At/ t/3-f/тг А17порог (Af/nopor - напряжение чувствительности релейного элемента) релейный элемент переключается и вырабатывает сигнал .
При поступлении сигнал на вход логического распределителя последним подключаются короткоза мыкающие вентили катодной группы V, Уз, V моста 3. Двигатель на выбеге тормозится. При Af/ А Г/порог двигатель получает очередную «порцию энергии. Таким образом, включением и выключением вентилей Уь Уз, Vs осуществляется стабилизация положительной скорости на уровне, определяемом задающим напряжением, посредством модуляции тока якоря, среднее значение которого определяется приведенным моментом инерции и привода и статическим моментом на
валу двигателя.
При реверсе электропривода, т. е. по команде «Пуск назад, устройство ввода вырабатывает сигналы М 0 и , при поступлении которых на вход распределителя 20 снимаются сигналы управления с вентилей моста 2 и подаются на вентили моста 3. На участке спадания скорости двигателя до нуля вентили моста 3 работают в инверторном режиме, благодаря которому
происходит быстрое торможение с рекуперацией кинетической энергии в сеть. Далее происходит разгон двигателя в обратном направлении до скорости, определяемой напряжением задания, когда привод входит
в режим стабилизации отрицательной скорости. РежиА стабилизации отрицательной скорости осуществляется посредством подключения в точках естественного открывания вентилей анодной группы моста 2 (V2,
У/„ FB) аналогично стабилизации положительной скорости.
По команде «Стоп, например, при торможении на отрицательной скорости до нуля на входе логического распределителя
действуют сигналы , , , R l, P-Q. При наличип такой комбинации сигналов распределителем подключаются все вентили моста 2, и на участке спадания скорости до нуля вентили этого моста работают в инверторном режиме. При достижении двигателем нулевой скорости на входе распределителя 20 начинает действовать другая комбинация сигналов: М 0, , , / 1, Я 0, которой будет соответствовать режим короткого замыкания источника тока, когда в работе останутся только вентили анодной группы моста 2 и дополнительно подключатся вентили катодной группы моста 3.
Формула изобретения
Электропривод постоянного тока, содержащий двигатель независимого возбуладения, якорь которого подключен к сети переменного тока чергз два встречно-параллельных
тиристорнЫх моста, входы которых подсоединены через согласующий трансформатор к трехфазному индуктивно-емкостному преобразователю, релейный элемент, вход которого соединен с выходом сумматора, к одному входу последнего подключен источник задающего напряжения, а к другому - тахогенератор, вал которого сочленен с валом двигателя, отличающийся тем, что, с целью улучщения динамических показателей электропривода, в него введены токовые нуль-органы, блок синхронизации с тремя выходами, блок ввода-вывода, датчик наличия и направления вращения, источник пускового сигнала, логический распределитель, согласующие элементы и три датчика тока, включенные по одному в линейные провода между выходом согласующего трансформатора и входом двух встречно-параллельных тиристорных мостов, при этом выход каждого из датчиков соединен с двумя разнополярньши по входу токовыми
нуль-органами, выходь которых заведены на блок синхронизации, а выходы блока синхронизации подключены к входам логического распределителя, к другим входам
которого подключены выходы релейного элемента, источника пускового сигнала и по два выхода с блока ввода-вывода и с датчика наличия и направления вращения, причем вход блока ввода-вывода подключей к выходу источника задающего напряжения, вход датчика наличия и направления вращения подключен к тахогенератору, а каждый из выходов логического распределителя связан через согласующий элемент с соответствующим тиристором встречно-параллельных мостов.
Источники информации, принятые во внимание при экспертизе
1Авторское свидетельство СССР № 489189, кл. Н 02Р 5/06, 1975.
2Авторское свидетельство СССР по заявке № 2526490, кл. Н 02Р 5/06, 1977.
6(6-)(21/()((2,

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный электропривод постоянного тока | 1980 |
|
SU930548A1 |
| Электропривод постоянного тока | 1986 |
|
SU1390758A1 |
| Электропривод постоянного тока | 1980 |
|
SU904168A1 |
| Электропривод | 1981 |
|
SU957394A1 |
| Электропривод постоянного тока | 1983 |
|
SU1145439A1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| Реверсивный вентильный электродвигатель | 1977 |
|
SU744861A1 |
| Реверсивный электропривод постоянного тока | 1989 |
|
SU1598094A1 |
| Устройство для компенсации реактивной мощности многомостового вентильного преобразователя | 1982 |
|
SU1069065A1 |
| Реверсивный вентильный электропривод | 1977 |
|
SU705634A1 |
шгп
Ж
птшш
птпп
пшгп
