OS
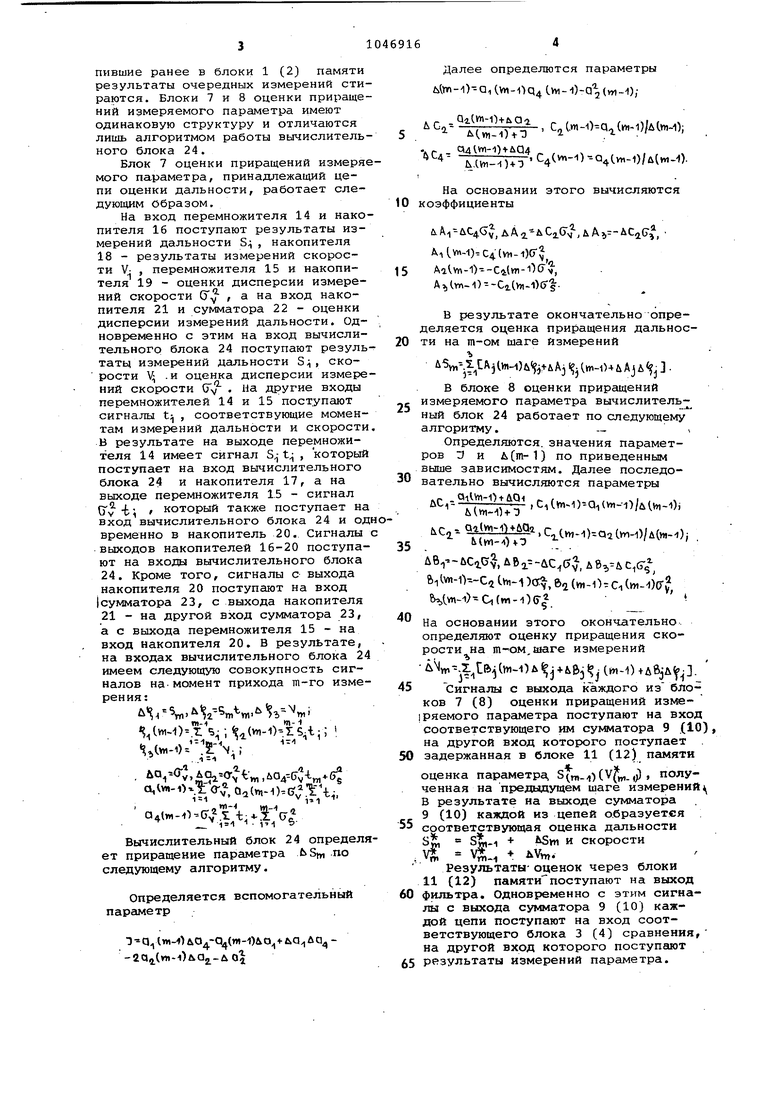
X) :) Изобретение относится к радиотехнике и предназначено для фильт рации результатов измерений двух функционально связанных параметро например, дальности и скорости, которые выражены цифровым кодом. Известен цифровой рекурсивный фильтр, содержащий первый и второ сумматоры, при этом один из первы входов первого сумматора образует вход фильтра, а выход второго сум матора образует его выход, выход первого сумматора соединен с входом второго сумматора, состоящего из двух последовательно соединенных элементов задержки tilНедостатком устройства является относительно низкая точность фильтрации двух функционально свя занных параметров, например, скорости и дальности, поскольку для получения максимально точных оценок необходимо вести одновременную обработку результатов измерений дальности и скорости. Наиболее близким по техническо сущности к предлагаемому является нелинейный цифровой фильтр, содер жащий две цепи, каждая из которых состоит из последовательно соединенных блока сравнения, двустороннего ограничителя, сумматора и нерекурсивного фильтра, выход которого подключен к другим входам соответствующего ему блока сравнения и сумматора, а также блока оценки дисперсии измерений, вход которого подключен к выходу соответствующего ему двустороннего ограничителя первый выход -- к входу соответствующего двустороннего ограничителя второй выход - к управляющим входам нерекурсивных фильтров, причем выход сумматора каждой из цепей подключен к другому сигнальному входу нерекурсивного фильтра другой цепи 1 2. Недостатком устройства является относительно большое время фильтра ции, обусловленное необходимостью хранения и обработки относительно большого объема измерительной инфо мации в,нерекурсивных фильтрах, которая используется для получения оценок дальности и скорости на каж дом шаге измерений. Цель изобретения - увеличение быстродействия. Для достижения поста вленной цели в цифровой рекурсивный фильтр, содержащий две цепи, каждая из которых состоит из блока сравнения, сумматора и блока оценки дисперсии измерений, в каждую цепь введены два блока памяти и блок оценки при ращений измеряемого параметра, при этом вход первого блока памяти каж дои цепи объединенС первыми входами блоков оценки приращений измеряемого параметра и является соответствующим входом устройства, в каждой цепи выход первого блока памяти через последовательно включенные блок сравнения и блок оценки дисперсии измерений подключен к вторым входам блоков оценки приращений измеряемого параметра, в каждой цепи вход второго блока памяти объединен с другим входом блока сравнения и подключен к выходу суммато- . ра, первый вход которого соединен с выходом блока оценки приращений измеряемого параметра, а второй вход - с выходом второго блока памяти. На фиг. 1 представлена структурная электрическая схема цифрового рекурсивного фильтра, на фиг 2 структурная электрическая схема блока оценки приращений измеряемого параметра. Цифровой рекурсивный фильтр (фиг. 1) содержит две цепи, каждая из которых состоит из последовательно соединенных блока 1 (2) памяти, блока 3 (4) сравнения, блока 5 (6) оценки дисперсии измерений, блока 7 (8) оценки приращений измеряемого параметра, второй вход которого подключен к ВХОДУ блока 1 (2) памяти, сумматора 9 (10), выход которого подключен к другому входу блока 3 (4) сравнения, и блока 11 (12) памяти, выход которого подключен к другому входу сумматора 9 (10) . При этсал выход блока 5 (6) оценки дисперсии измерений каждой из цепей подключен к входу блока 7 (8) оценки приращений измеряемого параметра другой цепи. Блок 7 (8) оценки приращений измеряемого параметра (фиг. 2) содержит генератор 13 опорных сигналов, перемножители 14-15, накопители 16-21, сумматоры 22-23 и вычислительный блок 24. Рекурсивный цифровой фильтр работает следующим образом.. Результаты измерений дальности S и скорости V в моменты времени t поступают на соответствующие входы цифрового рекурсивного фильтра (фиг. 1). Примем, что измерения дальности и скорости характеризуются несмещенными ошибками измерений с дисперсиями (J и ( соответственно . Результаты измерений заносятся в соответствующие им блоки 1 (2) памяти, представляющие собой регистры записи числа, и в блоки 7 (8) оценки приращений измеряемого параметра. При поступлении в блоки 1 (2), памяти очередных измерений, поступившие ранее в блоки 1 (2) памяти результаты очередных измерений стираются. Блоки 7 и 8 оценки приращений измеряемого параметра имеют одинаковую структуру и отличаются лишь алгоритмом работы вычислительного блока 24.
Блок 7 оценки приращений измерямого параметра, принадлежащий цепи оценки дальности, работает следующим Образом.
На вход перемножителя 14 и накопителя 16 поступают результаты измерений дальности S, накопителя 18 - результаты измерений скорости У , перемножителя 15 и накопителя 19 - оценки дисперсии измерений скорости (j , а на вход накопителя 21 и сумматора 22 - оценки дисперсии измерений дальности. Одновременно с этим на вход вычислительного блока 24 поступают результату измерений дальности S, скорости .и оценка дисперсии измерений скорости (7у . На другие входы перемножителей 14 и 15 поступают сигналы t;j , соответствующие моментам измерений дальности и скорости В результате на выходе перемножителя 14 имеет сигнал , который поступает на вход вычислительного блока 24 и накопителя 17, а на выходе перемножителя 1.5 - сигнал G- -t который также поступает на вход вычислительного блока 24 и одвременно в накопитель 20, Сигналы выходов накопителей 16-20 поступают на входы вычислительного блока 24. Кроме того, сигналы с выхода накопителя 20 поступают на вход Iсумматора 23, с выхода накопителя 21 - на другой вход сумматора 23, а с выхода перемножителя 15 - на вход накопителя 20, В результате, на входах вычислительного блока 24 имеем следующую совокупность сигналов на-момент прихода т-го измерения:
.,.,1
(ум-О.тЧ-; «(vn-D-is t;; I
,ы-1).;
, ла1.45 ОГчН- „,.б а,«-1).|.о,(п,иЬ(У,-.|Ч.
°4i--.,.i;a
-1
6Вычислительный блок 24 определяет приращение параметра bSm по следующему алгоритму.
Определяется вспомогательный параметр
(и--|)
Далее определются параметры Mim-i ai()-Qi().
- -Х-Уо С,(.т-Фа(.и)/дЫ-1); V г q4lvri--i)t&a4
)TTC4 - --°4tvi -i)/u(t-i)t
На основании этого вычисляются коэффициенты
u.A-,--uC4..j.ACi(Jv,iA,3-AC,iG-, .
AUvw-ibC4(ni-i)(r5, A7(.v«-l)-C4twi-i)Gv, А,,Ы-1)-Сг(у,-1)еГ|.
В результате окончательно определяется оценка приращения дальности на т-ом шаге измерений г
ni--.(vn-i)u(it&Aj 1. Cm-04bAjA j .
В блоке 8 оценки приращений измеряемого параметра вычислительный блок 24 работает по следующему алгоритму.
Определяются, значения параметров t3 и л(т-1) по приведенным выше зависимостям. Далее последовательно вычисляются параметры
--l(), («.-.); ,
йВ,-йСгС, АЬг--йс,б, AB,,.&c,G-5 6ilvn-l)-C Ch,-i )сг, ъ (.}.с, Cw-l)(r,
4(.w-i)-Ci(w--))G|
На основании этого окончательно, определяют оценку приращения скорости на т-ом,шаге измерений
Ь
.)(т-1)+д6.5-А..
Сигналы с выхода Каждого из блоков 7 (8) оценки приращений измеРяемого параметра поступают на вход соответствующего им сумматора 9 .(10), на другой вход которого поступает .
задержанная в блоке 11 (12) памяти
оценка параметра, S,.;,)(V.,;), полученная на предыдущем шаге измерений
8результате на выходе сумматора
9(10) каждой из цепей образуется соответствующая оценка дальности
sS, Syl,-i + bSwi и скорости V V., + AVvn.
Результаты-оценок через блоки 11 (12) памяти поступают на выход
фильтра. Одновременно с этим сигналы с выхода сумматора 9 (10) каждой цепи поступают на вход соответствующего блока 3 (4) сравнения, на другой вход которого поступают
Результаты измерений параметра.
Результаты сравнения возводятся в квадрат и усредняются по результатам нескольких сравнений в блоке 5 (6) оценки дисперсии. В результате с выхода блока 5 (6) в блок 7 (8) поступаю необходимые оценки дисперсии ошибек измерений GgC&v/Этим самым обеепепивается адаптация фильтра к измерению точности измерений параметров, что обеспечивает повышение точности фильтрации.
Таким образом, благодаря введению новых блоков и связей увеличивается быстродействие фильтра при
фильтрации двух функционально связанных параметров (дальности и скорости) , поскольку обеспечивается рекурсивная оценка параметров на каждом шаге измерений только по результатам измерений этих параметров на данном шаге и оценки параметров, полученных на предыдущем шаге измерений. При этом все необходимые вспомогательные величины
определяются рекурсивно, что исключает необходимость хранения и обработки больших массивов измерительной и вспомогательной информации.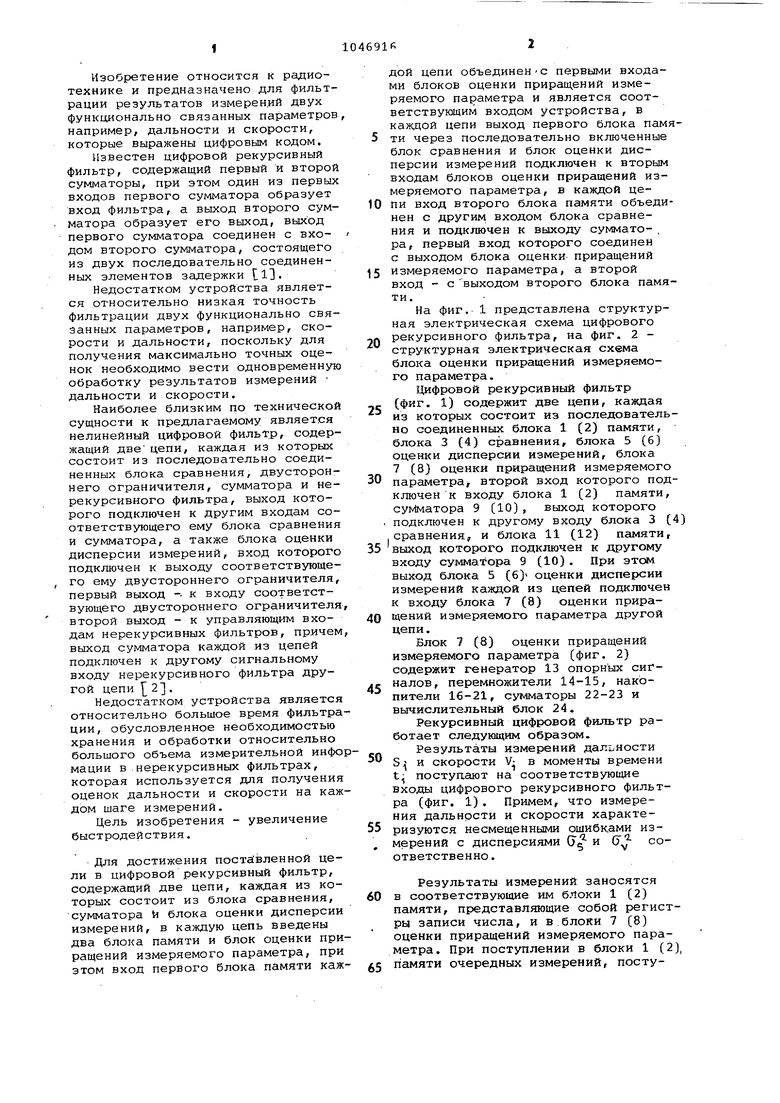
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный цифровой фильтр | 1981 |
|
SU1003339A2 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ | 1982 |
|
SU1090136A1 |
| Нелинейный цифровой фильтр | 1980 |
|
SU928614A2 |
| Нелинейный цифровой фильтр | 1979 |
|
SU813701A2 |
| ЦИФРОВАЯ СИСТЕМА СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1995 |
|
RU2087006C1 |
| Цифровое устройство для подав-лЕНия пАССиВНыХ пОМЕХ | 1979 |
|
SU809018A1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ | 1977 |
|
SU1015757A1 |
| Нелинейный цифровой фильтр | 1981 |
|
SU1042162A2 |
| Нелинейный цифровой фильтр | 1979 |
|
SU871302A2 |
| Нелинейный цифровой фильтр | 1980 |
|
SU951653A2 |
ЦИФРОВОЙ РЕКУРСИВНЫЙ ФИЛЬТР, содержащий две цепи, каждая Из которых состоит из блока сравнения, блока оценки дисперсии измерений и сумматора, отличающийся тем, что, с целью увеличения быстродействия фильтра, в каждую цепь введены два блока памяти и блок оценки приращений измеряемого параметра, при этом вход первого блока памяти каждой цепи объединен с первыми входами блоков оценки приращений измеряемого параметра и является соответствующим, входом устройства,, в каждой цепи выход первого блока памяти через последовательно включенные блок сравнения и блок оценки дисперсии измерений подключен к вторым входам блоков оценки приращений измеряемого параметра, в каждой цепи вход второго блока памяти объединен с другим входом блока сравнения и подключен к выходу сумматора, первый вход которого соединен i с выходом блока оценки приращений |измеряемого параметра, а второй (Л вход - с выходом второго блока памяти .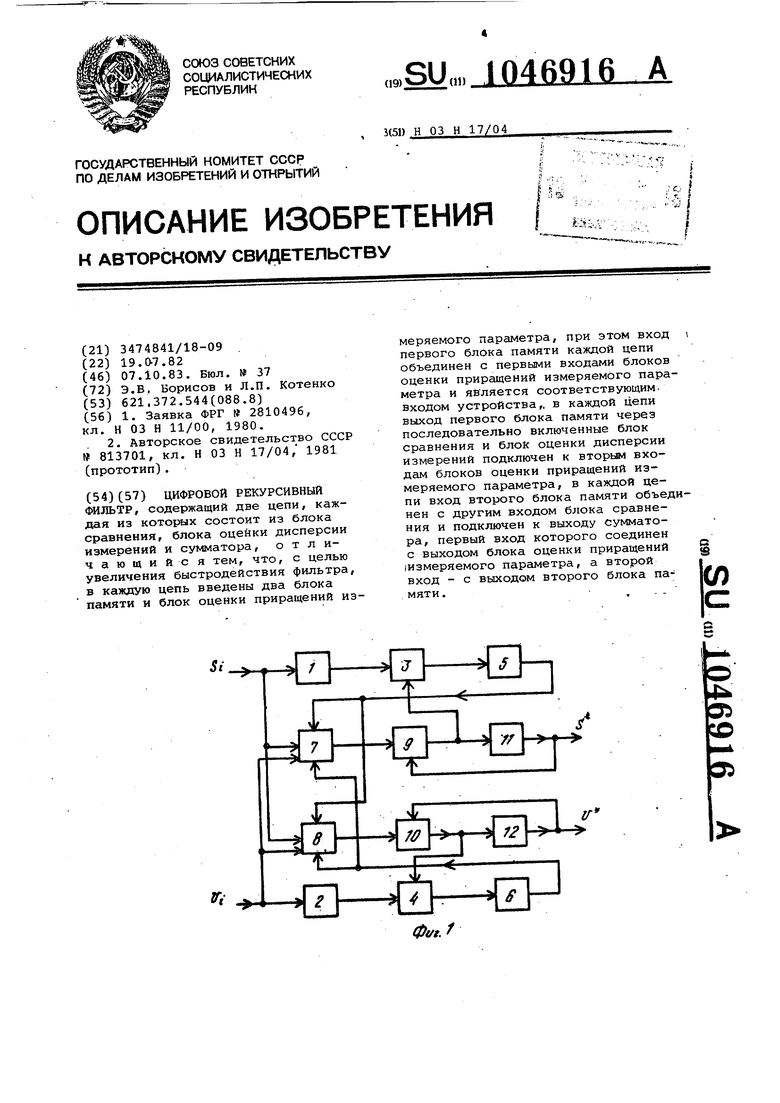
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Полиморфная форма 2-(дифенилацетил)-1H-инден-1,3(2H)-диона с улучшенными показателями скорости наступления гибели и способ ее получения | 2023 |
|
RU2810496C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Нелинейный цифровой фильтр | 1979 |
|
SU813701A2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
