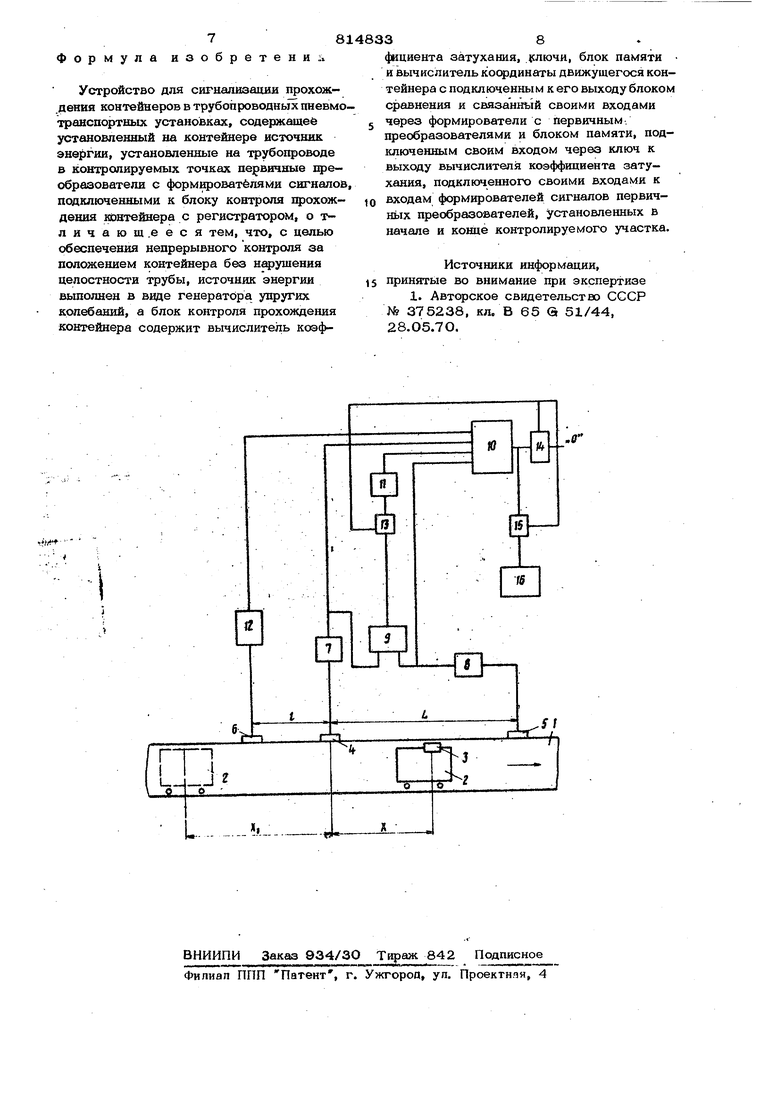
СВОИМИ входами через формирователи с перв .ными преобразователями и блоком памяти, подключенным своими входами через ключ к выходу вычислителя коэффициента затухани подключенного своими входами к входам формирователей сигналов первичных преобр зователей, установленных в начале и конце контролируемого участка. . На чертеже изображено предлагаемое устройство. Устройство содержит контрол ный участок 1 трубопровода, движущийся контейнер 2, на котором помещен генератор 3 упругих колебаний, превичные преобразователи 4, 5, один из которых 4 помещен в начале контрольного участка 1, а другой 5 - в конце этого участка, дополнительный первичный преобразователь 6 упругих.колебаний, расположённый на некотором расстоянии от преобразователя 4. Выходы первичных преобразователей 4, 5 через формирователи 7, 8 сигналов, включающие фильтры и преобразователи мощности, соединены со входами вычислителя коэффициента 9 затухания и вычислителя 10 координаты движущегося контейнера. Кроме того, на другие входы вычислителя Ю координаты движущегося контейнера поступает сигнал с выхода блока 11 памяти и с дополнительного первичного преобразователя 6 после прохождения через формирователь 12. Выход вычислителя коэффициента 9 затухания через ключ 13 соединен со входом блока 11 памяти. Выход вычислителя 1О координаты движущегося контейнера поступает на один из входов блока 14 сравнения и через второй ключ 15 на регистратор 16. Ключи 13 и 15 управляютсявыходны сигналом блока 14 сравнения, на другой вход которого подается сигнал, соответствующий пулевой координате контейнера. В частном случае источником 3 упруг колебаний могут служить шумы от вибра ции движущихся контейнеров и упругие колебания будут распространяться по стенкам трубы, а первичными преобразователями могут служить виброметры или тензодатчики. Основные зависимости для расчета коэффициента затухания упругих колебаний и координаты движущегося контейнера получены следующим образом. Пусть расстояние между наиболее удаленными первичными преобразователя ми 5, 6 выбрано таким, что в пределах контрольного участка может находиться КО один движущийся контейнер или дного. Предположим, что контейнер дится вне контрольного участка на тоянии X от первичного преобразоля 4 и Х U от первичного преобрателя 5. Мощность упругих колебаНи ) воспринимаемая первичным презователем 4 и мощность Кп , воспри-. емая .первичным преобразователем пределяется из формул ( V н,-ы,.,, (L) ifi ci - коэффициент затухания упругих колебаний, и - мощность упругих колебаний генерируемых контролируемым контейнером, - мощность колебаний, генерируемых - м контейнером, Ц - расстояние между первичными преобразователями 4 и 5, количество контейнеров, движущихся в пнеемолите, v - расстояние от i-ro контейнера до первичного преобразователя 4. з уравнений (1) и (2) следует, аким образом, измеряя мощность гих колебаний первичными преобраелями 4, 5, можно определить коэфент затухания ci. ри нахождении контейнера внутри олируемого участка -dix -. „-dX. -sN-t 1-1 j f р х -d(4;,-vL), v%,v ., SN - расстояние между первичными преобразователями 4 и 6, К) - мощность сигнала, измеряемого первичным преобразователем 6, X - расстояние между «i- м контейнером и первичным преобразователем 4, ачим C-. , ,t- A--NoeА и в - составляющие полезной мо ности, воспринимаемой пер вичными преобразователями 4, 5 соответственно, С - составляющая шума от дви жения других контейнеров. Система (4) примет вид N2--в ce (6) H --Ar tct 4 Рещая систему (б), получим А--ам -ън dW где а, в, с, d - постоянные, зависящие от выбранных значени Си L. Веря отношение -S- с учетом (5), по- лучим J (1,.) А откуда V--il4 P iКогда контейнер .. .находится вне контрольного участка, отношение 1-. p-oLu covis.t , В этом случае согласно (9), К Таким образом, как видно из выражений (3), (7), (8), (9), значение координаты контейнера не зависит от параметров излучаемого контейнером сигнала (амплитуды и частоты), 1ри эт влияние шумов от сигналов других контейнеров исключается. Аналогичные зависимости нетрудно получить для случая, когда источником шума являются контейнеры, движущиеся по обе стороны от контрольного участк 1, при этом потребуется еше одни допо нительный первичный преобразователь, установленный на некотором расстоянии от первичного преобразователя 5. Устройство работает следующим обр зом. При движении контейнера 2 вне . контрольного участка 1, Нбшример вне участка торможения, упругие колебания генерируемые генератором 3, восприни ются первичными преобразователями 4, 5, б, выходные сигналы с которых после прохождения через формирователи 7, 8, 12 сигналов поступают на входы 336 вычислителя Ю координаты движущегося контейнера. Кроме того, сигналы с выхода формирователей сигналов 7, 8 поступают на . входы вычислителя 9 коэффициента затухания, где согласно (З) вычисляется коэффициент затухания упругих колебаний. Сигнал с выхода вычислителя 9 коэффидиента затухания через открытый . ключ 13 и блок 11 памяти поступает на один из входов вычислителя 10 координаты движущегося контейнера, на выходе которого, появляется сигнал, соответствующий координате О согласно формулы (9). Сигнал с выхода вычислителя координаты движущегося контейнера поступает на вход блока 14, сравнения где сравнивается с сигналом, соответствующим координате О и поступающим на другой вход блока 14 сравнения. При равенстве сигналов выходной сигнал с блока 14 сравнения держит открытым ключ 13 и закрытым ключ 15, при этом сигнал с выхода вычислителя координаты движущегося контейнера на регистратор 16 не поступает. При дальнейшем движении контейнера 2 он попадает в пределы контрольного участка 1, при этом в вычислителе 1О координаты движущегося контей&ера определяется координата контейнера Х70согласно (7), (8), (9). При поступлении сигнала, характеризующего кофдинату Х О на блок 14 сравнения, последний своим выходным сигналом закрывает ключ 13 и открывает ключ 15, при этом на регистратор 16 поступит соответствующий сигнал, характеризующий координату движущегося контейнера. Измерение координаты движущегося контейнера осуществляется непрерывно во времени, пока контейнер движется в пределах контрольного участка 1. Непрерывное измерение координаты движущегося контейнера, а . следовательно, и его скорости, с требуемой точностью, используя для этой цели минимальное количество первичных преобразователей обеспечит необходимой информацией устройствадля управления движением контейнеров на ответственных участках, например при торможении. Первичные преобразователи упругих колебаний устанавливаются на . . поверхности трубы, при этом не нарушается ее целостность. 7 Формула и 3 о б р тени Устройство для сигнализации прохож.дения контейнеров в трубопроводнь1х пневм транспортных установках, содержащее установленный на контейнера источник энергии, установленные на трубонроводе в контролируемых точках первичные преобразователи с формирователями сигнало подключенными к блоку контроля прохож дения контейнера с регистратором, о тличающ.ееся тем, что, с целью обеспечения непрерывного контроля за положением контейнера без крушения целостности трубы, источник энергии выполнен в ввде генератора упругих колебаний, а блок контроля прохождения контейнера содержит вычислитель коэф38фициента затухания, ключи, блок памяти и вычислитель координаты движущегося контейнера с подключенным к его выходу блоком сравнения и связаннь1й своими входами через формирователи с первичным. преобразователями и блоком памяти, под шюченным своим входом через ключ к выходу вычислителя коэффициента затухания, подключенного своими входами к входам формирователей сигналов первичнь1х преобразователей, установленных в начале и конце контролируемого участка. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 375238, кл. В 65 (а 51/44, 28.О5.70.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2574167C1 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 1992 |
|
RU2039366C1 |
| Установка для присоединения проволочных выводов | 1991 |
|
SU1773643A1 |
| Устройство для управления объектом с присоединенными упругодеформируемыми элементами | 1989 |
|
SU1767476A1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ РАСХОДОМЕР ПОТОКА ГАЗА ИЛИ ЖИДКОСТИ | 2011 |
|
RU2460047C1 |
| Устройство для оценки функциональ-НОгО СОСТОяНия цЕНТРАльНОй НЕРВНОйСиСТЕМы | 1978 |
|
SU850043A1 |
| Устройство для определения информации о параметрах процесса резания | 1983 |
|
SU1119825A1 |
| Импульсно-фазовое устройство для контроля толщины | 1990 |
|
SU1747894A1 |
