Изобретение касается управления динамическими объектами.
Известно устройство, обеспечивающее управление переориентацией объекта за счет реализации пропорционального закона управления. Устройство содержит после- довательносоединенные
усилитель-преобразователь, блок гироскопических исполнительных органов, объект управления, датчик углового рассогласования, второй выход объекта управления через датчик угловой скорости подключен к второму входу усилителя-преобразователя, первый вход которого связан с выходом датчика углового рассогласования. Недостаток известного устройства - неоптимальные временные затраты на процесс управления.
Известная система ориентации и стабилизации, выбранная в качестве прототипа, содержит последовательно соединенные блок исполнительных органов, объект управления, датчик угловой скорости, усили- тепь-преобразователь, первый сумматор, первый релейный элемент, выход которого соединен с входами двух схем совпадения, вторые входы которых соединены с выходом второго релейного элемента, второй выход объекта управления соединен с входом датчика угла, выход которого соединен с входами двух сумматоров, второй вход второго сумматора соединен через усилитель с выходом усилителя-преобразователя, а выход - с входом второго релейного элемента, выМ
0 х|
Ј
ходы схем совпадения соединены с входами блока исполнительных органов,
Недостатком известного устройства является возможность возбуждения значительных амплитуд колебаний упругодеформируемых элементов (УДЭ). Это приводит к необходимости длительной стабилизации и демпфированию возбужденных в процессе ориентации колебаний упругого элемента.
Целью изобретения является сокращение длительности переходного процесса переориентации динамического обьекта с присоединенными упругодеформируемыми элементами.
С этой целью устройство для управления объектом с присоединенными УДЭ, содержащее объект управления с присоединенными УДЭ, вход которого связан с выходом бло ка исполнительных органов, а первый и второй выходы соединены соответственно через датчик углового рассогласования и датчик угловой скорости с информационными входами первого и второго ключей, управляющие входы которых подключены к выходу блока пуска, выходы первого и второго ключей соединены соответственно с первым и вторым входами формирователя основного управляющего момента, дополнительно снабжено моделью объекта как твердого тела, формирователемвспомогательногоуправляющего момента, вычислителем интервалов управления и блоком переключения основного управляющего момента, причем первый и второй входы модели объекта как твердого тела соединены с первым и вторым входами блока исполнительных органов и первым и вторым выходами формирователя вспомогательного управляющего момента, первый вход которого соединен с выходом модели объекта как твердого тела, второй и третий входы связаны с выходом датчика угловой скорости, четвертый вход связан с выходом датчика углового рассогласования. а пятый вход соединен с первым выходом блока переключения основного управляю- щего момента, второй и третий выходы которого подключены соответственно к третьему и четвертому входами блока исполнительных органов и модели объекта как твердого тела, первый вход блока переключения основного управляющего момента подключен к первому выходу формирователя основного управляющего момента, а второй вход подключен к второму выходу фоомирователя основного управляющего моме-нта и первому
0
5
0
5
0
5
0
5
0
входу вычислителя интервалов управления, второй и третий входы которого соединены соответственно с выходами первого и второго ключей, первый и второй выходы вычислителя интервалов управления соединены соответственно с третьим и четвертым входами блока переключения основного управляющего момента, а третий выход вычислителя интервалов управления подключен к третьему входу формирователя основного управляющего момента.
Отсутствие в технической и патентной литературе сведений по выполнению данного устройства для управления объектом с присоединенными УДЭ в целях достижения описанного эффекта, показывает новизну взаимосвязи между совокупностью существенных признаков изобретения и положительным эффектом. Это обеспечивает существенное отличие данного изобретения от всех известных устройств-аналогов.
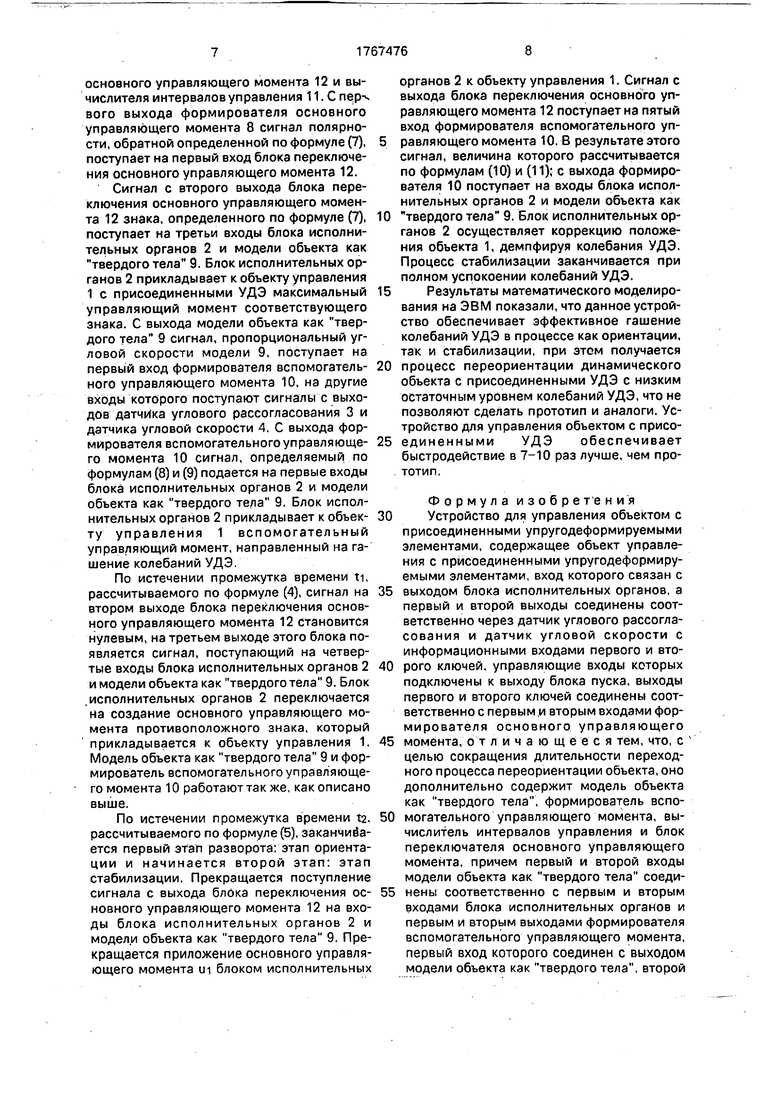
На чертеже представлена функциональная схема устройства для управления объектом с присоединенными УДЭ,
Устройство содержит объект управления 1 с присоединенными УДЭ, блок исполнительных органов 2, датчик углового рассогласования 3 и датчик угловой скорости 4, два ключа 5 и 6, блок пуска 7, формирователь основного управляющего момента 8, модель объекта как твердого тела 9, формирователь вспомогательного управляющего момента 10, вычислитель интервалов управления 11, блок переключения основного управляющего момента 12. Следует отметить, что для реализации модели объекта как твердого тела, формирователей основного и вспомогательного управляющих моментов, вычислителя интервалов управления, блок переключения основного управляющего момента могут быть использованы известные элементы электронной техники. Ключи 5 и 6 могут быть реализованы на базе микросхем 1100СК2. КР1100СК2. Блок исполнительных органов выполнен на основе реактивных двигателей (сопел).
В основу изобретения положено следующее. Известно, что уравнения движения обьекта с присоединенными УДЭ могут быть представлены в виде
-if-J
bi si + и ;
i 1
(1)
mi si + mi w ОД si/лг + mi of si - bi у , (2) где у- координата корпуса обьекта управления;
I - массово-инерционный параметр корпуса объекта управления;
bi - коэффициент взаимовлияния корпуса объекта и УДЭ;
si - обобщенная координата упругого элемента;
cat - частота i-ro тона собственных колебаний УДЭ;
ц - логарифмический декремент затухания 1-го тона:
п - число учитываемых тонов колебаний УДЭ;
mi - модальная масса i-ro тона;
и - управляющий момент.
То есть движение объекта как твердого тела (без учета УДЭ) в соответствии с (1) может быть описано уравнением
-ly u(3)
Оптимальный по быстродействию разворот такого твердого тела можно осуществить, прикладывая основной управляющий момент релейного вида, имеющий два интервала знакопостоянства, длительности которых ti и ta вычисляются по формулам
ti --t Trrsf9n °1 + 2(4)
. Г(;
sing uf,
(5)
.„,
2 v k0 ui k0 ui где УО , УО - координаты объекта управления в момент начала переориентации;
ko - коэффициент передачи объекта управления как твердого
ui - максимальная величина основного управляющего момента;
ti - длительности интервалов постоянства основного управляющего момента, i 1, 2.
На основании (3) значение коэффициента передачи объекта как твердого тела составляет
ко -1/1.(6)
Знак основного управляющего момента на первом интервале определяется выражением
ui /ui/sign Ч ;
На первом этапе осуществления разворота объекта с присоединенными УДЭ - этапе ориентации - объект управляется как твердое тело в соответствии с выражениями (3)-(7) при помощи основного управляющего органа; одновременно осуществляется частичное демпфирование колебаний УДЭ при помощи вспомогательного управляющего органа, а именно сравнивается значение угловой скорости объекта у и угловой скорости модели объ
екта как твердого тела ум , получаемая величина ошибки, вычисляемой как
Ау у-ум(8)
используется как управления объектом. При
5 этом формируется вспомогательное управляющее воздействие U2 в соответствии с выражением
U2 /u2/sign Ay(9),
где U2 - максимальное значение вспомога10 тельного управляющего момента.
На втором этапе разворота динамического объекта с присоединенными УДЭ - этапе стабилизации - к объекту управления прикладывается управляющий момент, оп15 ределяемый в соответствии с выражениями U2 lu2lsign a ;(10)
6 kiy + k2y + кзДу ,(11)
где ki, k2, кз - коэффициент пропорциональности ,
20у, у- текущие значения угла и угловой
скорости.
Использование такого закона управления, учитывающего разностный сигнал А у, который несет информацию с поведении
25 удэ, позволяет эффективно демпфировать остаточные колебания УДЭ. После приведения объекта управления в заданное положение процесс управления заканчивается. Устройство для управления объектом с
30 присоединенными УДЭ, работает следующим образом. Текущие значения угла рассогласования к угловой скорости объекта управления 1 снимаются соответственно с датчика углового рассогласования 3 и датчи35 «а угловой скорости 4. При необходимости совершения разворота объекта 1 включают блок пуска 7 (это может быть нажатие кнопки Пуск), разрешающий сигнал поступает на входы ключей 5 и 6. Начальные значения
0 рассогласования по углу и угловой скорости поступают соответственно на второй и третий входы вычислителя интервалов управления 11 и первый и второй входы формирователя основного управляющего
45 момента 8. На двух выходах вычислителя интервалов управления 11 формируются сигналы, пропорциональные длительности интервалов управления ti, t2, вычисленные по формулам (4) и (5), поступающие на тре50 тий и четвертый входы блока переключения основного управляющего момента 12. Сигнал, пропорциональный у0 /(k0ui), с третьего выхода вычислителя интервалов управления 11 поступает на третий вход
55 формирователя основного управляющего момента 8. Сигнал знака, вычисленного по формуле (7), поступает с второго выхода формирователя основного управляющего момента 8 на входы блока переключения
основного управляющего момента 12 и вычислителя интервалов управления 11. С пер-ч вого выхода формирователя основного управляющего момента 8 сигнал полярности, обратной определенной по формуле (7), поступает на первый вход блока переключения основного управляющего момента 12.
Сигнал с второго выхода блока переключения основного управляющего момента 12 знака, определенного по формуле (7), поступает на третьи входы блока исполнительных органов 2 и модели объекта как твердого тела 9. Блок исполнительных органов 2 прикладывает к объекту управления 1 с присоединенными УДЭ максимальный управляющий момент соответствующего знака. С выхода модели объекта как твердого тела 9 сигнал, пропорциональный угловой скорости модели 9, поступает на первый вход формирователя вспомогатель- ного управляющего момента 10, на другие входы которого поступают сигналы с выходов датчика углового рассогласования 3 и датчика угловой скорости 4. С выхода формирователя вспомогательного управляюще- го момента 10 сигнал, определяемый по формулам (8) и (9) подается на первые входы блока исполнительных органов 2 и модели объекта как твердого тела 9, Блок исполнительных органов 2 прикладывает к объек- ту управления 1 вспомогательный управляющий момент, направленный на гашение колебаний УДЭ.
По истечении промежутка времени ti, рассчитываемого по формуле (4), сигнал на втором выходе блока переключения основного управляющего момента 12 становится нулевым, на третьем выходе этого блока появляется сигнал, поступающий на четвертые входы блока исполнительных органов 2 и модели объекта как твердого тела 9. Блок .исполнительных органов 2 переключается на создание основного управляющего момента противоположного знака, который прикладывается к объекту управления 1. Модель объекта как твердого тела 9 и формирователь вспомогательного управляющего момента 10 работают так же, как описано выше.
По истечении промежутка времени t2, рассчитываемого по формуле (5), заканчивается первый этап разворота: этап ориентации и начинается второй этап: этап стабилизации. Прекращается поступление сигнала с выхода блика переключения ос- новного управляющего момента 12 на входы блока исполнительных органов 2 и модели объекта как твердого тела 9. Прекращается приложение основного управляющего момента ui блоком исполнительных
органов 2 к объекту управления 1. Сигнал с выхода блока переключения основного управляющего момента 12 поступает на пятый вход формирователя вспомогательного управляющего момента 10. В результате этого сигнал, величина которого рассчитывается по формулам (10) и (11); с выхода формирователя 10 поступает на входы блока исполнительных органов 2 и модели объекта как твердого тела 9. Блок исполнительных органов 2 осуществляет коррекцию положения объекта 1, демпфируя колебания УДЭ. Процесс стабилизации заканчивается при полном успокоении колебаний УДЭ.
Результаты математического моделирования на ЭВМ показали, что данное устройство обеспечивает эффективное гашение колебаний УДЭ в процессе как ориентации, так и стабилизации, при этом получается процесс переориентации динамического объекта с присоединенными УДЭ с низким остаточным уровнем колебаний УДЭ, что не позволяют сделать прототип и аналоги. Устройство для управления объектом с присо- единенными УДЭ обеспечивает быстродействие в 7-10 раз лучше, чем прототип.
Формула изобретения Устройство для управления объектом с присоединенными упругодеформируемыми элементами, содержащее объект управления с присоединенными упругодеформируемыми элементами, вход которого связан с выходом блока исполнительных органов, а первый и второй выходы соединены соответственно через датчик углового рассогласования и датчик угловой скорости с информационными входами первого и второго ключей, управляющие входы которых подключены к выходу блока пуска, выходы первого и второго ключей соединены соответственно с первым ,и вторым входами фор- мирователя основного управляющего момента, отличающееся тем, что, с целью сокращения длительности переходного процесса переориентации объекта, оно дополнительно содержит модель объекта как твердого тела, формирователь вспомогательного управляющего момента, вычислитель интервалов управления и блок переключателя основного управляющего момента, причем первый и второй входы модели объекта как твердого тела соединены соответственно с первым и вторым входами блока исполнительных органов и первым и вторым выходами формирователя вспомогательного управляющего момента, первый вход которого соединен с выходом модели объекта как твердого тела, второй
и третий входы связаны с выходом датчика угловой скорсоти, четвертый вход - с выходом датчика углового рассогласования, а пятый вход - с первым выходом блока переключения основного управляющего момента, второй и третий выходы которого подключены соответственно к третьему и четвертому входам блока исполнительных органов и модели объекта как твердого тела, первый вход блока переключения основного управляющего момента подключен к первому выходу формирователя основного управляющего момента, а второй вход
к второму выходу формирователя основного управляющего момента и первому входу вычислителя интервалов управления, второй и третий входы которого соединены соответственно с выходами первого и второго ключей, первый и второй выходы вычислителя интервалов управления соединены соответственно с третьим и четвертым входами блока переключения основного управляющего момента, третий выход вычислителя интервалов управления - с третьим входом формирователя основного управляющего момента.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления динамическим объектом с присоединенным упругим элементом | 1989 |
|
SU1767477A1 |
| Система терминального управления упругим объектом | 1987 |
|
SU1434403A1 |
| Система идентификации колебаний присоединенного к объекту упругого элемента переменной жесткости | 1986 |
|
SU1432457A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1989 |
|
SU1659981A2 |
| Устройство для регулирования расхода жидкости | 1984 |
|
SU1236434A2 |
| Устройство для регулирования расхода жидкости | 1983 |
|
SU1158979A1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2006 |
|
RU2326447C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2305050C1 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2011 |
|
RU2494006C2 |
Изобретение относится к управлению динамическими объектами, в частности к устройствам для управления объектами с присоединенными упругодеформируемыми элементами. Цель изобретения - сокращение длительности переходного процесса переориентации объекта. С этой целью устройство для управления объектом с присоединенными упругодеформируемыми элементами, содержащее объект управления, блок исполнительных органов, датчики угловой скорости и углового рассогласования, два ключа, блок пуска, формирователь основного управляющего момента, дополнительно снабжено моделью объекта как твердого тела, формирователем вспомогательного управляющего момента, вычислителем интервалов управления, блоком переключения основного управляющего момента. 1 ил,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Разыграев А.П | |||
| Основы управления полетом космических аппаратов и кораблей | |||
| М.: Машиностроение, 1977 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| А.Уильямса | |||
| Книга I | |||
| M,: Мир, 1987 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Теоретические основы оптимального управления упругими космическими аппаратами | |||
| М.: Машиностроение, 1986. | |||
