(54) ЗАГРУЗОЧНЫЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВИЛЬНЫЙ АГРЕГАТ | 1991 |
|
RU2068531C1 |
| Вакуумная элеваторная электропечь | 1978 |
|
SU765621A1 |
| Автоматическая линия загрузки шахтных печей для производства активированного угля | 1989 |
|
SU1666442A1 |
| Устройство для загрузки поддонов | 1980 |
|
SU943511A1 |
| Мусоровоз | 1985 |
|
SU1265099A1 |
| Устройство для опорожнения емкостей | 1987 |
|
SU1535765A1 |
| УСТАНОВКА ИОННО-ПЛАЗМЕННОЙ ОБРАБОТКИ ИЗДЕЛИЙ | 2013 |
|
RU2538708C2 |
| Контейнер | 1986 |
|
SU1406068A2 |
| УСТАНОВКА ДЛЯ ПЕРЕМЕЩЕНИЯ И РАЗДЕЛКИ НА ФРАГМЕНТЫ ПЕНАЛОВ С ОБЛУЧЕННЫМ ГРАФИТОМ УРАН-ГРАФИТОВЫХ АТОМНЫХ РЕАКТОРОВ | 2007 |
|
RU2349977C2 |
| КОМПЛЕКТ УСТРОЙСТВ И СПОСОБ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА В МНОГОМЕСТНУЮ ШАХТНУЮ ПУСКОВУЮ УСТАНОВКУ ВЕРТИКАЛЬНОГО ПУСКА | 2011 |
|
RU2493046C2 |
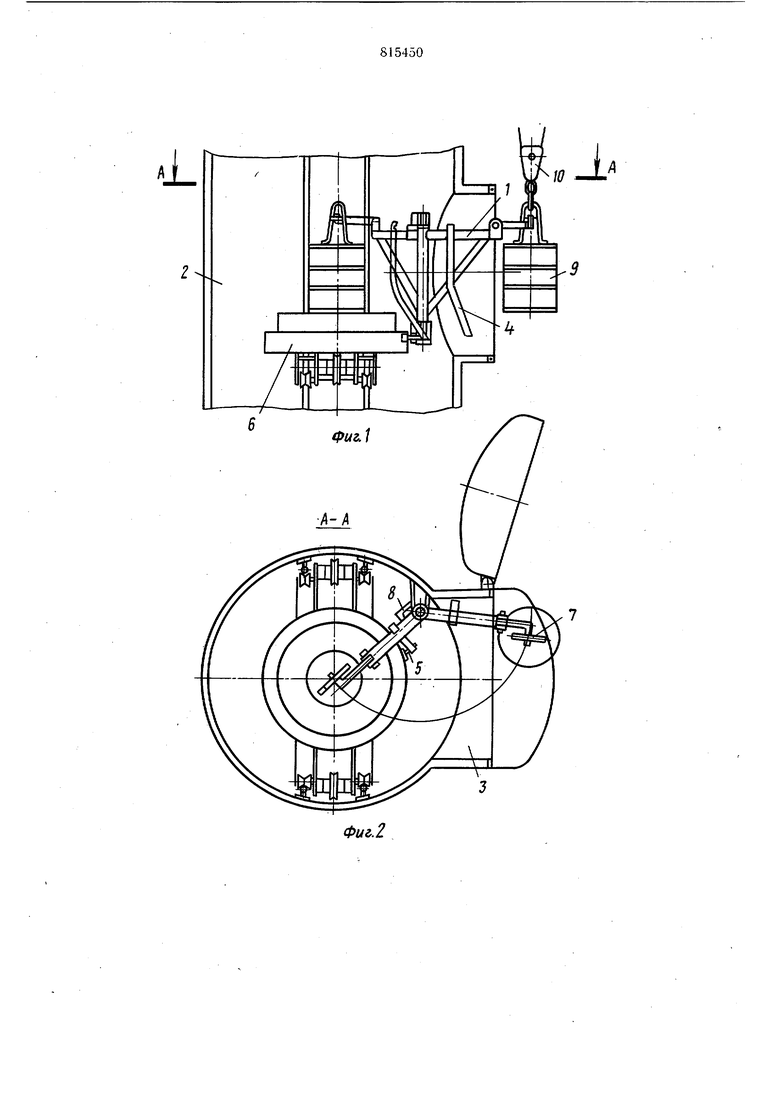
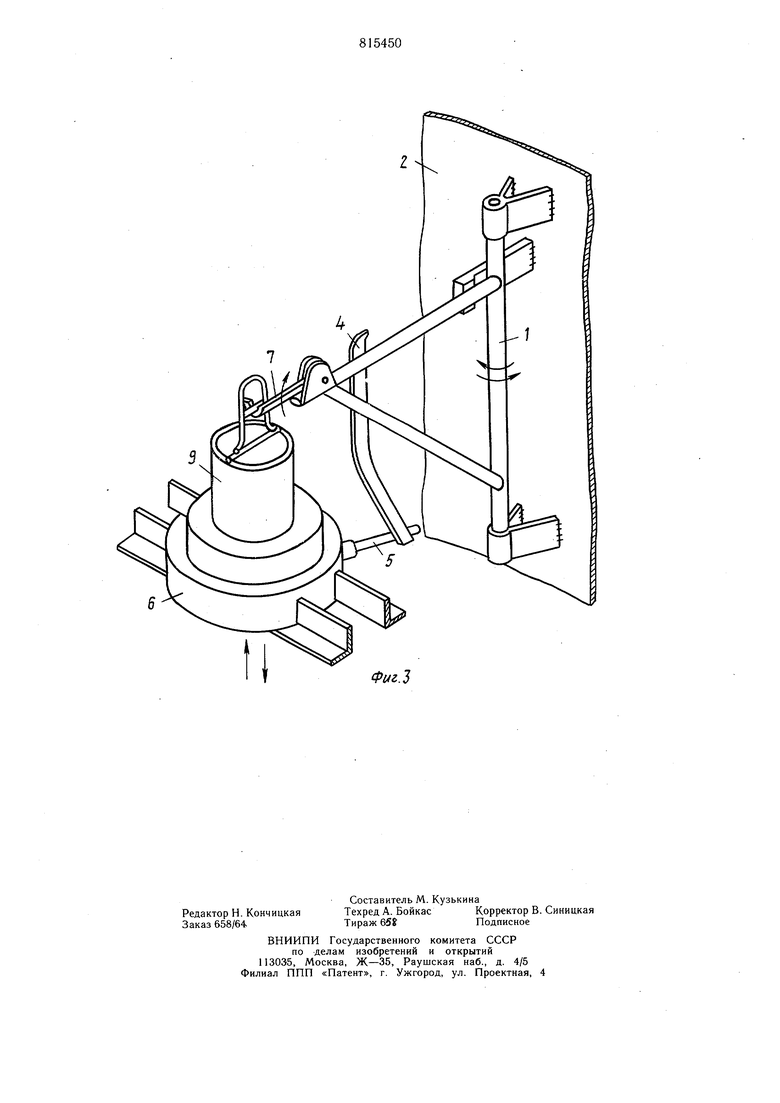
Изобретение относится к загрузочным механизмам -преимущественно вакуумных элеваторных электропечей для термической обработки изделий в вакууме. Известен загрузочный механизм содержащий вертикальную колонну, установленную на подвижной платформе с закрепленным на ней захватывающим устройством IJ. Однако известный загрузочный механизм металлоемкий и загромождает полезную площадь цеха. Загрузка контейнеров таким механизмом требует больщих физических усилий. Известен .также загрузочный механизм, содержащий с захватом и каретку. Указанный механизмне занимает полезной площади цеха и не требует больщих физических усилий при перемещении грузов 2 Однако в кран-укосине захват свободно подвешен на тросе, поэтому зев его расположен в вертикальной плоскости, вследствие чего на него невозможно подвещивать контейнер непосредственно с захвата кранбалки. Кроме того, расцепление и зацепление свободно подвешенного захвата кранукосины и ушка контейнера может осуществляться только вручную после установки контейнера на каретку печи, т. е. в зоне высокой температуры. Это занимает много времени, ухудшает условия труда и не соответствует требованиям техники безопасности. Цель изобретения - сокращение времени загрузки и улучщение условий труда. Поставленная цель достигается тем, что механизм снабжен укрепленной на кранукосине направляющей и упором, закрепленным на каретке и взаимодействующим с направляющей, при этом захват выполнен в виде Г-образного крюка, расположенного в горизонтальной плоскости, и укреплен на кран-укосине с возможностью поворота в вертикальной плоскости. Расположение крюка Г-образной формы в горизонтальной плоскости позволяет устанавливать на него контейнер за нижнее ушко непосредственно с крюка кран-балки. Шарнирное крепление указанного крюка с возможностью откидывания в вертикальной плоскости в совокупности с направляющей планкой обеспечивает автоматическое расцепление крюка при подъеме каретки с контейнером и отвод кран-укосины, что сокращает время загрузки печи и исключает проведение ручных работ по зацеплению и расцеплению контейнерй з полости печи, а это улучшает условия труда. На фиг. 1 изображена фронтальная проекция механизма загрузки; на фиг. 2 -- разрез А-А на фиг. 1; на фиг. 3 - изометрическая проекция меха 1изма загрузки. Механизм загрузки, представляющий собой кран-укосину 1, укреплен на боковой поверхности 2 печи около загрузочного люка 3. К кран-укосине 1 прикреплена направляющая планка 4, имеющая возможность контактирования с упором 5 подвижной каретки 6. На кран-укосине 1 щарнирно укреплен откидной Г-образный крюк. Поворот кран-укосины 1 ограничен заранее отрегулированным упором 8, так, что зев крюка 7 в крайнем положении кран-укосины 1 находится над центром каретки 6. Контейнер 9 с деталями устанавливается на крюк 7 кран-укосины 1 нижним ушком с помощью крюка 10 кранбалки (на чертеже не показана), которая захватывает его за верхнее ушко. Загрузочный механизм работает следующим образом. Кран-укосину 1 поворачивают так, чтобы ее крюк 7 вышел из загрузочного люка 3. контейнер 9 с деталями захватывается крюком 10 кранбалки за верхнее ушко и надевается за нижнее ушко на крюк 7 кранукосины 1. Затем кран-укосину 1 поворачивают до упора 8 вручную или пневматическим толкателем, затем закрывают и герметизируют люк 3 печи. После вакуумирования полости печи включают механизм подъема каретки 6. Поднимаясь вверх, каретка 6 захватывает контейнер 9 и поднимает его вверх, снимая с крюка 7 кран-укосины 1. Затем упор 5, движущейся вверх каретки 6, касается направляющей планки 4 и, взаимодействуя с ней, отводит кран-укосину 1 в свободное пространство печи в сторону люка 3. Если крюк 7 не успевает окончательно вместе с кран-укосиной 1 отойти.в сторону (например, из-за малой высоты нижнего ушка контейнера 9) от движущегося контейнера 9, то крюк 7, поворачиваясь в щарнире, откидывается движущимся контейнером вверх. в это время упор 5 каретки 6, продолжая контактировать с направляющей планкой 4, окончательно отводит кран-укосину в сторону от подвижных частей печи. В дальнейшем происходит процесс термообработки. По окончании его каретка 6 с контейнером 9 автоматически устанавливается в определенное по высоте положение против люка 3. Печь разгерметизируют и подают кран-укосину 1 до упора 8. Крюк 7 при этом заходит в нижнее ущко контейнера 9, после чего опускают каретку б, а подвешенный на крюке 7 контейнер 9 поворотом кран-укосины 1 выводят из полости печи через люк 3 и снимают его с помощью крюка 10 кранбалки. Загрузочный механизм не требует ручного труда для зацепления и расцепления контейнера с деталями в полости печи, а ЭТО улучшает условия -труда. С крюка загрузочного механизма можно транспортировать контейнер с деталями непосредственно на крюк любого другого подъемно-транспортного механизма, что сокращает время загрузки и выгрузки печи. Формула изобретения Загрузочный механизм, содержащий кран-укосину с захватом и каретку, отличающийся тем, что, с целью сокращения времени загрузки и улучщения условий труда, он снабжен укрепленной на кран-укосине направляющей и упором, закрепленным на каретке и взаимодействующим с направляющей, при этом захват выполнен в виде Г-образного крюка, расположенного в горизонтальной плоскости, и укреплен на кранукосине с возможностью поворота в вертикальной плоскости. Источники информации, принятые во внимание при экспертизе 1.Вакуумные элеваторные электропечи сопротивления СЭВ-2.2/11.5 МО1; СЭВ-3.3/11.5 МО1; СЭВ-5.5/11.5 МО1. Проспект ИФОРМЭЛЕКТРО.1970, № 13, М., с. 4, рис. 1. 2.Черненко Л. Д. Механизация подъемно-транспортных работ промыщленных предприятий. Зарубежный опыт. «Техника, Киев, 1968, с. 236.
Фиг.З
