(54) СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ И ПЕРЕМЕЩЕНИЙ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ получения и фиксирования картины муаровых полос | 1989 |
|
SU1716323A1 |
| Способ определения деформаций объекта | 1978 |
|
SU769317A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТОПОЛОГИИ ПОВЕРХНОСТИ МУАРОВЫМ МЕТОДОМ | 2004 |
|
RU2267087C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СТЕНКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ МУАРОВЫМ МЕТОДОМ | 2012 |
|
RU2497074C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ МЕХАНИЧЕСКОГО СОСТОЯНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2126523C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ЭЛЕКТРОННО-ПРОЕКЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ОБЪЕКТА | 2001 |
|
RU2216710C2 |
| ЭЛЕКТРОННО-ПРОЕКЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПЕРЕМЕЩЕНИЙ ПОВЕРХНОСТИ ОБЪЕКТА | 1992 |
|
RU2065570C1 |
| Способ дистанционного определения деформаций | 1973 |
|
SU518620A1 |
| УСТРОЙСТВО ДЛЯ ИЗУЧЕНИЯ ГЕОМЕТРИЧЕСКИХ НЕСОВЕРШЕНСТВ РЕЗЕРВУАРОВ МУАРОВЫМ МЕТОДОМ | 2011 |
|
RU2454627C1 |
| СПОСОБ МОДУЛЯЦИОННОЙ ОПТИЧЕСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2401061C1 |
Изобретение относится к измерите.пьной технике и может быть, использовано при исследовании напряженнодеформированного состояния деталей , конструкций, сооружений и вза им1ого перемещения их элементов. Известен способ определения деформаций и перемещений, заключающийся в том, что на поверхность объекта наносят растровые сетки, после нагружения объекта деформированную сетку анализируют путем многосрочногр сканирования приемником лучистой энергии, полученный сигнал вместе с параметрами сканирования ввдят в ЭВМ и обрабатывают по Зс1данной программе. в нем освещают сетку, которая про ецируется на исследуемое изделие. Отражаясь от поверхности изделия, изображение сети попадает с помощью другого объектива на растр приемника лучистой энергии. Если ось проецирования сети на изделие и ось приемник расположены под. некоторым углом друг к другу или, если исследуемая поверх ность изделия деформирована, изображ ние сетки на приемнике образует с ра ром приемника муаровые полосы. Выход ной сигнал с приемника подается в ЭВМ для обработки по заданной программе. Одновременно в ЭВМ вводится информация о параметрах сканирования в заданном -угле. После обработки результаты сравнивают с эталоном и могут использовать для исполнения нужной команды или индикации 1. Однако способ не позволяет измерить жесткие перемещения и деформации протяженных труднодоступных поверхностей объекта, находящегося в тяжелых условиях эксплуатации, так как затруднительно проецировать сетку на протяженную поверхность через среду с малой прозрачностью, а также в связи с тем, что измерительная аппаратура и исследователь должны находиться вблизи исследуемой поверхности. Известно устройство для определения деформаций и перемещений поверхности объекта, состоящее из двух световодов, монохроматического источника света, световой поток от которого направляют в световоды, на конце которых измерительным устройством определяют суммарный световой поток. По интенсивности суммарного светового потока определяют
еличину деформации жестко закрепленого участка одного из световодов, , следовательно, и деформацию иследуемого тела 2 .
Однако устройство не повзоляет змерять большие жесткие перемещеия и деформации протяженных поерхностей, находящихся в тяжелых словиях эксплуатации, так как опти-ески чувствительные волокна одновременно чувствительны к механическим и к температурным воздействиям. Наиболее близким по технической сущности к предлагаемому является способ определения деформаций и перемещений поверхности объекта, заключающийся в том, что на поверхность объекта наносят фоточувствительный слой, выполняющий роль рабочих растровых сеток, сравнивают их с изображением эталонных растровых сеток, после нагружения объекта вновь сравнивают изобра.жени я деформированных сеток с эталонными сетками в растровых сопряжениях и по полученной картине муаровых полос судят о деформации и перемещениях на поверхности объекта З .
Недостаток способа - отсутствие возможности измерения деформаций и перегмещений поверхностей объекта, удаленных друг от друга на значительное расстояние, так как сделать приемки торец световода бесконечно бспы кх невозможно.
На:-;:бс.лее близким по технической .„ущмосги к предлагаемому является устройство для определения деформаций и перемещений поверхности объекта, содержащее приемный световод, растровые сопряжения, включающие эталонные сетки и рабочие сетки, связанные с приемным световодом , блок сканирования и схему обработки информации. Световод в устройстве выполнен так, что.один его орец выполнен по форме поверхности объекта. Устрюйство содержит также кольцевую шторку и объектив с щелевой диафрагмой. Отслеживание торца световода производится с помощью кольцевой шторки
Недостаток устройства - отсутствие возможности измерения деформаций и перемещений объектов при исследовании напряженно-деформированнсЙго состояния протяженных труднодоступных и удаленных на значительное расстояние от регистрирующей .аппаратуры исследуемых поверхностей, находящихся в тяжелых условиях эксплуатации, так как в нем объектив, шторка и значительного сечения световод расположены в непосредственной близости от исследуемой поверхности, и определение деформаций производится только в одной ограниченной зоне.
Цель изобретения - расширение функциональных возможностей.
Поставленная цель достигается тем, что в способе после нанесения на поверхность объекта рабочих сеток поочередно освещают растровые сопряжения сеток с помощью передающих световодов, муаровые полосы ориентируют параллельно оси приемного световода и проецируют их в приемный световод через его боковую поверхность, а растровые сопряжения освещают, передающим световодом с его
торцовой и боковой поверхностей. Устройство для осуществления способа снабжено передающим световодом, связанным с эталонными сетками, и приемным световодом, каждый
5 световод выполнен ленточным, а схема обработки информации связаны с приемным световодом.
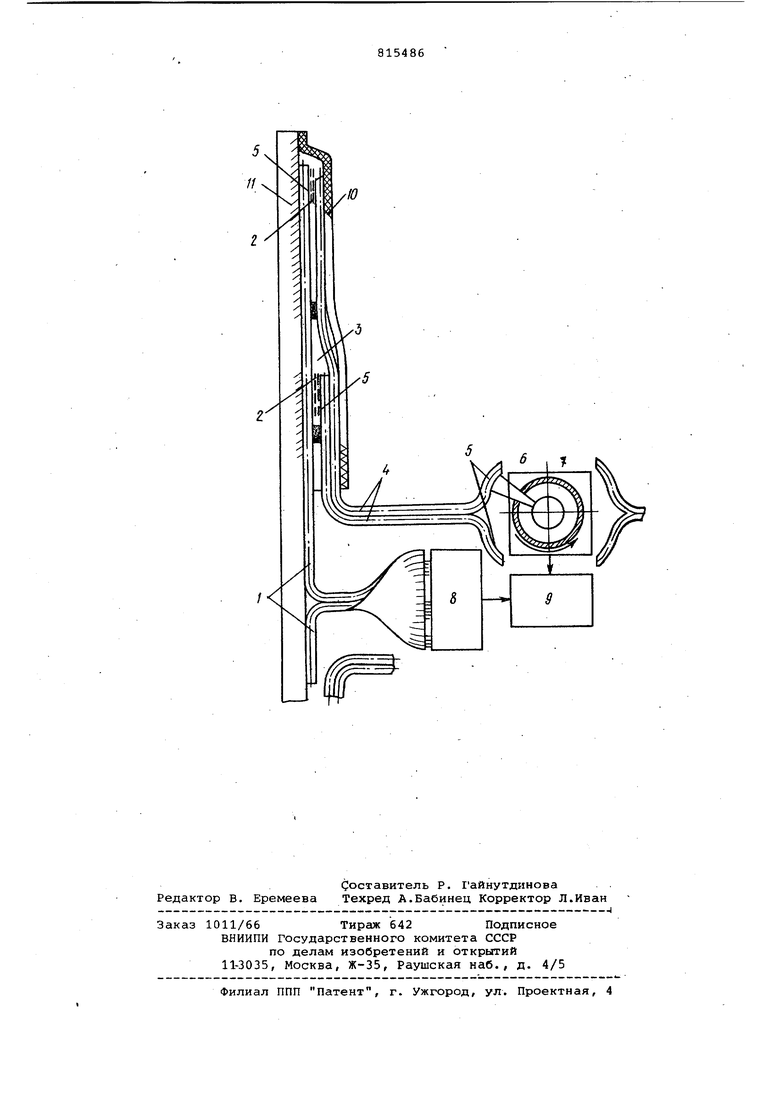
На чертеже изображено устройство определения деформаций и перемещений
Q поверхности объекта.
Устройство состоит из приемного .ленточного волокнистого световода 1, рабочих сеток 2., эталонных сеток 3, переданвдих ленточных световодов 4, элементов 5 связи, блока 6 сканирования с осветителем 7 и схемы обработки информации в виде, дешифратора 8 и ЭВМ 9, цифровой управляющий вход которой соединен с выходом дешифратора 8, вход которого соединен
D со свободным концом приемного светОвода 1, вход запуска. ЭВМ соединен с блоком 6 сканирования. Световоды 1 и 4 закрыты обтекателем. 10, при-t крепленным к исследуемой поверхности объекта 11, защищающим их от внешних воздействий и обеспечивающим плотное .прилегание сеток.
Приемный световод 1 несет на своей боковой поверхности элементы 5.
0 связи, например в виде матированных участков световода, и рабочие сетки 2, нанесенные, например, вакуумным способом, на матированные участки . световода. На одном конце на боковой поверхности передающего ленточного световода 4 расположены
эталонная сетка 3 с элементом 5 связи, а на другом - элемент 5 связи, который оптически связан с блоком 6 сканирования. Передаквдий световод
0 4 размещен на приемном световоде 1 с совмещением сеток 4 и связан с ним на заданном расстоянии от сеток.
Эталонную сетку 3 передающего световода 4 можно закреплять с некоторым напуском над его торцом,обеспечивая освещение растровых сопряжений передающим световодом с его торцовой и боковой поверхностей.
О Измерительных каналов, в состав которых входит приемный световод 1 с сетками 2 и передающие световоды 4 с эталонными сетками 3, может быть несколько, а остальные элементы уст5 poйcfia - в единичном экземпляре.
Элементы 5 связи на световодах получают путем травления их поверх- i ностей кислотами или же пескоструйной обработкой.
Определение перемещений поверхностей объекта производят следующим образом.
Растровое сопряжение,,образуемое рабочими сетками 2, нанесенными на поверхность объекта, и эталонными сетками 3, является своего рода оптическим индикатором перемещения.Передающий 4 и приемный 1 световоды жёстко соединены между собой на заданном расстоянии от растрового сопряжения. Передающий световодужесточают, например, путем его наклейки на стальную пластину, если исследуемая поверхность стальная,т.е. необходимо учитывать температурные коэффициенты линейного расширения исследуемой поверхности и пластины. Сравнивают рабочие растровые сетки с изображениями эталонных растровых сеток.
Для определения перемещения на заданной поверхности объекта блоком б сканирования от источника света поочередно освещают торец и элемент 5 связи передающего световода 4, т.е. освещают растровые сопряжения сеток с передачей информации о за- сватке на вход запуска ЭВМ 9. На другом конце передающего световода 4 через элемент 5 связи торец световода 4 проходит через растровое сопряжение. После нагружения объекта 11 вновь сравнивают изображение деформированных сеток с эталоннЕлми сетками в растровых сопряжениях, получают картинумуаровых полос, параллельных оси приемного световода 1, соориентированных путем соответствующего выбора направлений линии сеток и их взаимным расположением. Линии сеток 2, например, должны быть почти перпендикулярны оси приемного световода 1, а линии эталонных сеток 3 при их наложении на сетке 2 должны быть почти парал-. лельны линиям сеток 3. При этом перемещения определяют вдоль оси приемного световода 1. Муаровые полосы проецируются в приемный световод 1, а их профильное изображение на торце приемного световода расишфровывают деифратором 8, сигналы от которого поступают на цифровой управляющий вход ЭВМ 9, в памяти которой зафиксировано начальное положение полос ,и, кроме того, в память ЭВМ заранее вво ят информацию о шаге муаровых полос конкретного растрового сопряжения. сли исследуемая поверхность объекта 11 на измерительной базе станет длиняться или же укорачиваться,, то етка 2 по отношению к эталонной етке 3 станет перемещаться в аправлении оси приемного световода 1, а муаровые г1Олосв 1 будут перемещаться перпендикулярно оси приемногО световода 1- Причем количество полос, которое проходит через любую точку растрового поля, равно количеству штрихов движущейся сетки, которые прошли эту же самую точку. С помощью дешифратора 8 и ЭВМ 9 производится считывание полос, проходящих любую фиксированную точку и получают значения перемещения точки иссле0дуемой поверхности, выраженное через число шагов сетки. Зная перемещение на заданной базе, в ЭВМ 9 производится вычисление деформаций, определяется радиус кривизны поверх5ности и, при необходимости, величины нагрузок при условии, что в память были введены необходимые для расчета параметры, например, проведенная жесткость, геометрические характеристики сечений, информация о де-
0 формации противоположной поверхности исследуемого объекта конструкции и др. В ЭВМ может производиться и статистическая обработка информации. При этом часть информации может быть
5 введена на индикаторное устройство.
При определении деформаций поверхности объекта крепят между собой световоды 1 и 4 в непосредственной близости от сеток 2 и 3, что умень0шает измерительную базу до равной длине сеток. Деформация сетки 2 вызывает изменение шага линий сетки, что приводит к появлению муаровых полос или же, в случае применения сеток с равным шагом линий, к изменению шага муаровых полос. Зная их, можно описанным методом определить деформацию в точке крепления растрового сопряжения.
Для определения угловых деформаций муаровые полосы могут быть получены с применением радиальных сеток и комбинациями других видов сеток. При этом необходимо соблюдать основное условие, при- котором муаровые полосы должны быть параллельны оси приемного световода или же быть в виде пятна, не превышающего всю ширину ленты приемного световода, которое должно перемещаться поперек приемного световода.
Поочередное освещение растровых сопряжений с помощью передающих световодов, ориентация муаровых полос параллельно оси приемного световода, проецирование их в приемный световод через его боковую поверхность, освешение растрового сопряжения пере дающим световодом с его торцовой и боковой поверхностей, для чего устройство снабжено ленточным передающим световодом, связанным с эталонными сетками, и ленточным приемным световодом, который связан со схемой обработки информации, позволяет расширить функциональные возможности за
счет возможности определения деформаций и перемещений протяженных труднодоступных и удаленных на значительное расстояние от измерительной аппаратуры исследуемых поверхностей, находящихся в тяжелых условиях эксплуатации. Кроме того, способ и устройство позволяют определять деформацию и перемещения поверхностей объективов, удаленных друг от друга на значительное расстяние.
Формула изобретения
Источники информации, принятые во внимание при экспертиз
/
