(54) ИНЕРЦИОННЫЙ СТРЯХИВАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный стряхиватель | 1984 |
|
SU1346070A2 |
| Стряхиватель плодов | 1987 |
|
SU1482581A1 |
| ЭЛЕКТРИФИЦИРОВАННОЕ УСТРОЙСТВО ДЛЯ СТРЯХИВАНИЯ КЕДРОВЫХ ШИШЕК С ДЕРЕВЬЕВ | 2021 |
|
RU2777467C1 |
| Устройство для стряхивания плодов | 1980 |
|
SU880327A2 |
| УДАРНЫЙ СТРЯХИВАТЕЛЬ | 2007 |
|
RU2332832C1 |
| Встряхиватель плодоуборочной машины М.В.Литвина | 1987 |
|
SU1558337A1 |
| Устройство для стряхивания плодов с деревьев | 1982 |
|
SU1109087A1 |
| Машина для уборки плодов | 1975 |
|
SU581905A1 |
| Устройство для стряхивания плодов | 1987 |
|
SU1419578A1 |
| Встряхиватель плодоуборочного комбайна | 1988 |
|
SU1662408A1 |
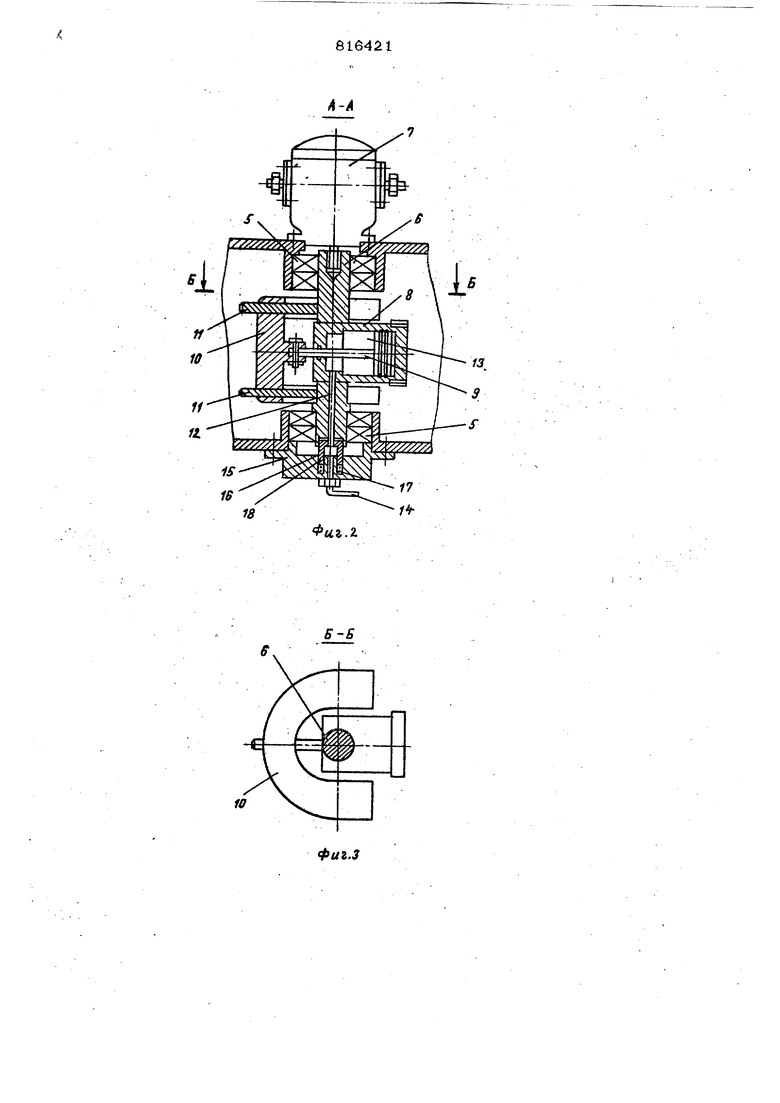
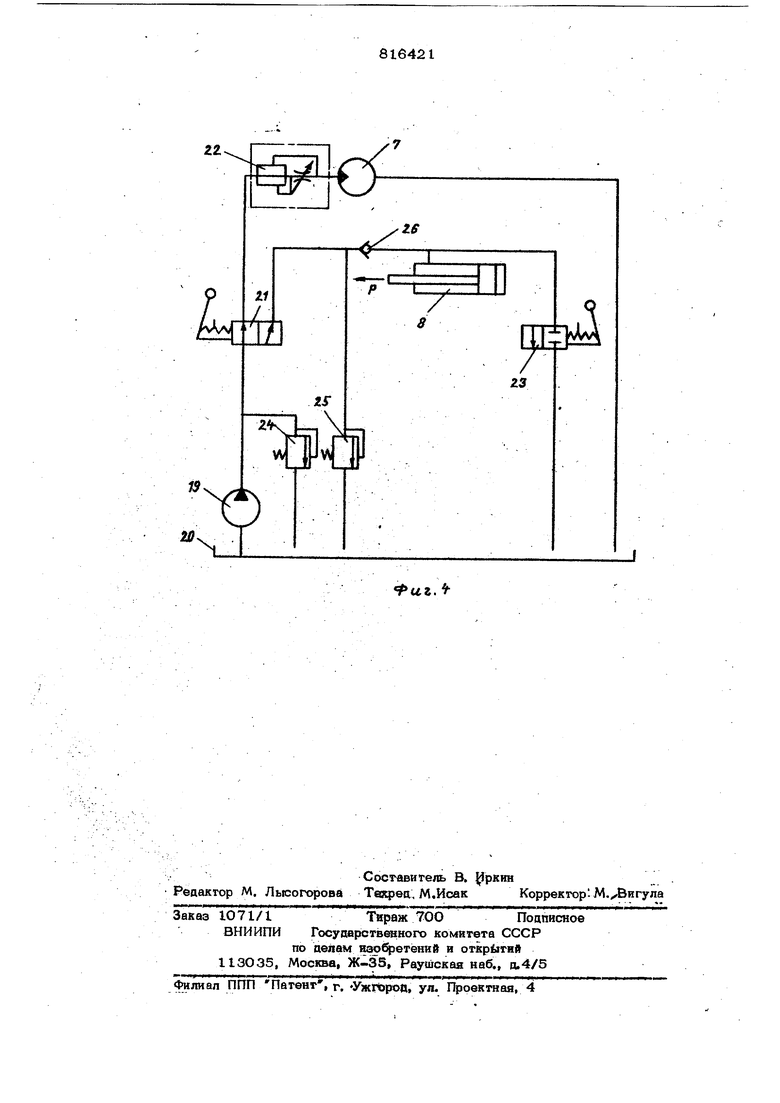
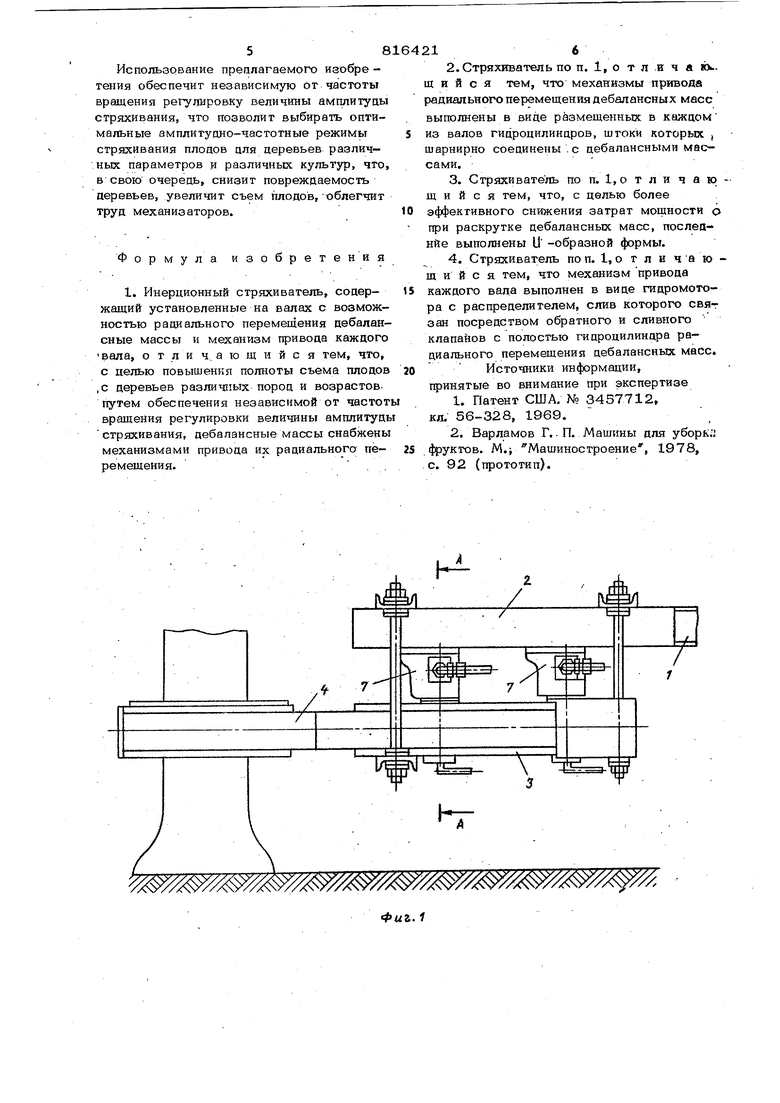
Изобретение относится к сельхозмашиностроению и может быть использовано Б машинах для уборки плодов. Известны инерционные стряхиватели пло доуборочных машин, содержащие раму с установленным на ней захватом. В раме размещены два вала, на каждом из которых посажены дебалансные массы (дебалансы). При вращении валов с дебалансами возникают инерционные силы, которые приводят в колебание систему стряхиватель-дерево. Регулирование величины возмущающей .силы возможно производить только за счет изменения частоты вращения цебалансов. При уменьшении частоты вращения уменьшается возмущающая сила и, следовательно, амплитуда стряхивания и наоборот ll. Соотношение межпу оптимальными амплитудами для уборки деревьев различных параметров и различных культур не равно соотношению оптимальных частот колебаНИИ. Таким образом, регулирование ампли туды колебаний стряхивателя, взаимосвязанное с частотой, не обеспечивает оптимальные режимы, необходимые для уборкиг различных культур с деревьев различных параметров. Наиболее близкий к предлагаемому инерционный стряхиватель содерхшт уста-, новленные на валах с возможностью радиального перемещения подпружиненные дебалансные массы и механизм привода каждого вала. В статическом положении грузы, расположенные на валу, находятся в сбалансированном состоянии. Под действием инерционной центробежной силы, возникакяцей при вращении, грузы по направляющим начинают перемадаться в радиальном направлении, если центробежная сила превыситсилы сопротивления пружин 2. Известная конструкция поЬволяет снизить затраты мощности в пусковой момент, так как цебалансы, а следовательно, и их центры инерции, рас положеныближе, чем в рабочем положении к оси вращения. На рабочих оборотах, как и в устройстве. выданном в качестве аналога, величина возмущающей силы взаимосвязана с оборо тами, хотя одновременно на нее влияет до определенного числа оборотов и изменение расположения центров инерции це- балансов. Недостатком стряхивателя является низкая .полнота съема плодов с деревьев различных пород и возрастов, так как отсутствует возмоншость независимой от частоты вращения регулировки величины амплитуды стряхивания., Цель изобретения - повыииение полноты съема плодов с деревьев различньк пород и возрастов путем обеспечения независимой от частоты вращения регулировки величгаы амплитуды стряхивания. Указанная цель достигается тем, -.что .дебалансные массы снабжены механизмами привода их радиального перемещения. Механизмы привода радиального перемещения дебалансных масс выполнены в виде размещенных в каждом из валов гид роцилиндров, штоки которых шарнирно сое динены с дебалансными массами. Причем последние выполнены f -образ ной формы. Кроме того, механизм привода каждог вала выполнен в виде гидромотора с распродели телем, слив которого связан посре ством обратного и сливного клапанов с полостью гицроцилинщэа радиального пере .мещения дебаланЪных масс. На фиг. 1 изображен стряхиватель, виц сбоку; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2 лш фиг, 4 - гидравлическая схема стряхи ; в а теля. - Инерционный стряхиватель состоит из подвешенной на трактор рамы 1, к котор подвижно гфикреплена каретка 2. К карет ке 2 жестко подвешен корпус 3 стряхива теля с шарнирно укрепленным к нему зах ватом 4. В корпусе 3 стряхивателя на подшипниках 5 установлены валы 6, каждый из которых приводится во вращение гидромотором 7.. В каждый из валов 6 встроен гицроцилиндр 8. Шток 9 гидроцилиндра 8 соединен шарнирно с дебалансной массой (дебалансом) 10, установленным на направляющих11 вала 6. Направл$шщие 11 жестко связаны с валом 6. В нижнем торце вала 6 выполнен кана 12, соединяющий полость 13 гидроцилин ара 8 с трубкой 14 гидросистемы. Для герметичного соединения канала 12 с гидромагистралью применено уплотадющее устройство, состбящее из корпуса 15, клапана 16, поджимаемого к торцу вала 6 пружиной 17, и ряда у плотни тельных колец 18-,. Гидросистема (фиг. 4), предназначенная для регулирования силы стряхивания, включает в себя гидронасос 19, засасывающий масло из гидробака 20 и нагнетающий его к распределителю 21, дроссель-регулятор 22, управляющий скоростью вращения вала 6 гидромотора 7, распределитель 23, управляющий гидроцилинцроМ 8, который служит для изменения положения и, соответственно, радиуса центра инерции дебаланса 10 (фиг, .2), предохранительный клапан 24, сливной клапан 25 и обратный клапан 26 линии связи. Устройство работает следующим образом.. . . После зажима дерева захватом 4 (фиг. 1) оператор ручкой распределителя 21 включает гидромоторы 7, Дебалансы 1О, имеющие в первоначальном положении незначительный радиус центра инерции, начинают вращаться с заданной (необходимой) частотой, регулируемой дросселем 22. При вращении дебалансов 10 возникает небольшая центробежная сила инерции Р приложенная к штоку 9 гидроцилиндра 8, Оператор посредством ручки распределителя 23 соединяет полость 13 гидроцилиндра 8 со сливом гидросистемы. Под действием силы Р на штоке 9 гидроцилиндра 8 жидкость через сливную магистраль поступает в бак 20 гидросистемы, а шток 9 гидроцилиндра 8 совершает поступательное движение, перемещая и -образный дебаланс 10 от оси вращения вала 6, тем самым увеличивая возмущающую силу до величины, необходимой для полного снятия плодов с деревьев без повреждения последних. После этого ручка распределителя 23 переводится в первоначальное положение и стряхиватель работает, с заданной частотой и силой стряхивания. При выключении стряхивателя ручкой распределителя 21 гидромогоры 7 останавливаются, слив распределителя соединяется через обратный Клапан 26 с полостью 13 гидроцилиндра 8. Рабочая жидкость давит на поршень гидродилин фа 8 и перемещает шток 9 в первоначальное положение, а вместе с ним и дебаланс 10. При повышении давления в системе выше необходимого для перемещения штока 9 срабатывает сливной клапан 25, когторый перепускает рабочую жидкость в гкщробак 20. Использование преалагаемого изобретения обеспечит независимую о г частоты вращения регулировку величины амплитуды стряхивания, что позволит выбирать оптимальные амплитуоно-частотные режимы стряхивания плодов для деревьев различных параметров и различных культур, что, в свою очередь, снизит повреждаемость деревьев, увеличит съем плодов, -облегчит труд механизаторов. Формула изобретения 1. Инерционный стряхиватель, содержащий установленные на валах с возможностью радиального перемещения цебалансные массы и механизм привода каждого вала, о т л и ч, а ю щ и и с я тем, что, с целью повышения полноты съема плодов ,с деревьев различных пород и возрастовпутем обеспечения независимой от частот вращения регулировки величины амплитуды стряхивания, дебалансные массы снабжены механизмами привода их радиального перемещения.. 2.СтряхиБатель по п. 1, о т л .и я а RVщ и и с я тем, что механизмы привода радиального перемещения дебалансных масс выполнены в вице размещенных в каждом из валов гицроцилиндров, штоки которых j шарнирно соединены . с дебалансными массами, 3.Стряхиватель по п. 1,о тли ч а ю щ и и с я тем, что, с целью более эффективного снижения затрат мощности о при раскрутке дебалансных масс, последние выполнены U -образной формы. 4.Стряхиватель по п. 1, о т л и чающийся, тем, что механизм привода каждого вала выполнен в виде гидромотора с распределителем, слив которого свяг зав посредством обратного и сливного клапанов с полостью гидроцилиндра радиального перемещения дебалансных масс. Источники информации, принятые во внимание при экспертизе 1.Патент США, № 3457712, кл. 56-328, 1969. 2,Варламов Г..П. Машины для уборк. фруктов. M.J Машиностроение , 1978, с. 92 (прототип). Фиъ.1
AH:ii
IS
bU
Щ
2К
W
хЬ
W
Ч
az.
