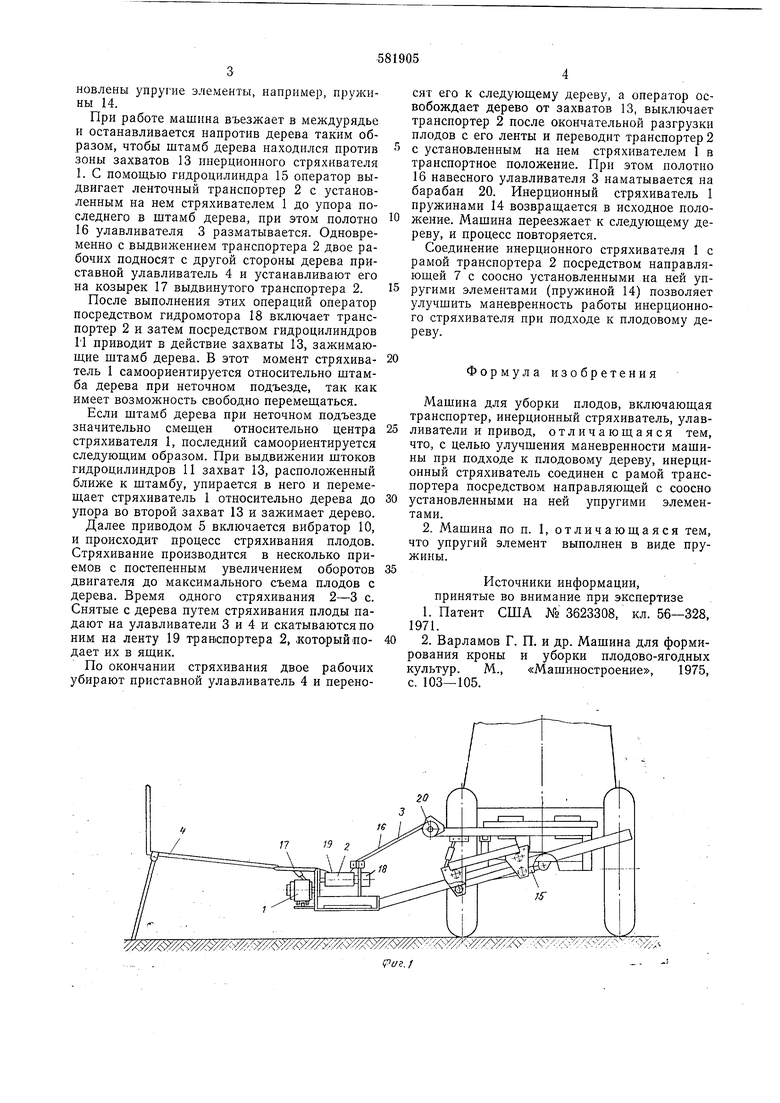
Изобретение относится к сельскохозяйственному машиностроению и предназначено для механизироваиной уборки плодовых культур. Известны машины для уборки плодов со стряхивателями, которые жестко установлены на раме машины 1J. Недостатками таких машин являются большие затраты времени на маневрирование при захвате штамба дерева. Наиболее близка к изобретению машина для уборки плодов, включаюш,ая транспортер, инерционный стряхиватель, улавливатели и привод 2. В такой машине корпус встряхивателя подвешен к раме машины на трех подвесках через амортизируюш,ие резиновые подушки. Такая подвеска требует точного подвода встряхивателя к штамбу дерева. С этой целью ходовая часть машины полностью гидрофицирована, все колеса имеют индивидуальные привод п управление. Однако такая конструкция машины не дает значительного повышения производительности труда. Кроме того, эта машина недостаточно маневренна при подходе к плодовому дереву. С целью улучшения маневренности при подходе к плодовому дереву в предлагаемой машине инерционный стряхиватель соединен с рамой транспортера посредством направляющей с соосно установленными на ней упруги ми элементами, выполненными в виде пружины. На фиг. 1 схе матично изображена предлагаемая машина для уборки плодов, вид сзади; на фиг. 2-инерционный стряхиватель, обш.ий вид. Машина включает инерционный стряхиватель 1, ленточный транспортер 2, улавливатели - навесной 3 и приставной 4, привод 5. Инерционный стряхиватель 1 служит для сообш,ения вибрации дереву и состоит из корпуса 6, который посредством направляющей 7 перемещается возвратно-поступательно в роликовых опорах 8, установленных на раме 9 ленточного транспортера 2, и самоориентируется относительно штамба дерева. Корпус 6 опирается также на раму 9 транспортера 2 посредством опор качения, что позволяет устанавливать инерционный стряхиватель 1 в горизонтальное положение. Колебательное движение стряхивателя 1 обеспечивается вибратором 10 от привода 5. Внутри корпуса 6 стряхивателя монтируются гидроцилиндры 11, корпуса которых жестко соединены между собой скобой 12. Штоки гидроцилиндров 11 соединены с захватами 13, имеющими возможность перемещаться по скобе 12 и зажимать штамб дерева. Для возврата стряхивателя 1 в исходное (среднее) пололсение в направляющей 7 установлены упругие элементы, например, пружины 14.
При работе машина въезжает в междурядье и останавливается напротив дерева таким образом, чтобы штамб дерева находился против зоны захватов 13 инерционного стряхивателя 1. С помощью гидроцилиндра 15 оператор выдвигает ленточный транспортер 2 с установленным на нем стряхивателем 1 до упора последнего в штамб дерева, при этом полотно 16 улавливателя 3 разматывается. Одновременно с выдвижением транспортера 2 двое рабочих подносят с другой стороны дерева приставной улавливатель 4 и устанавливают его на козырек 17 выдвинутого транспортера 2.
После выполнения этих операций оператор посредством гидромотора 18 включает транспортер 2 и затем посредством гидроцилиндров 11 приводит в действие захваты 13, зажимающие штамб дерева. В этот момент стряхиватель 1 самоориентируется относительно штамба дерева при неточном подъезде, так как имеет возможность свободно перемещаться.
Если штамб дерева при неточном подъезде значительно смещен относительно центра стряхивателя 1, последний самоориентируется следующим образом. При выдвижении штоков гидроцилиндров 11 захват 13, расположенный ближе к штамбу, упирается в него и перемещает стряхиватель 1 относительно дерева до упора во второй захват 13 и зажимает дерево.
Далее приводом 5 включается вибратор 10, и происходит процесс стряхивания плодов. Стряхивание производится в несколько приемов с постепенным увеличением оборотов двигателя до максимального съема плодов с дерева. Время одного стряхивания 2-3 с. Снятые с дерева путем стряхивания плоды падают на улавливатели 3 и 4 и скатываются по ним на ленту 19 транспортера 2, который-подает их в ящик.
По окончании стряхивания двое рабочих убирают приставной улавливатель 4 и переносят его к следующему дереву, а оператор освобождает дерево от захватов 13, выключает транспортер 2 после окончательной разгрузки плодов с его лепты и переводит транспортер 2 с установленным па пем стряхивателем 1 в транспортное положение. При этом полотно 16 навесного улавливателя 3 наматывается на барабан 20. Инерционный стряхиватель I пружинами 14 возвращается в исходное положение. Машина переезжает к следующему дереву, и процесс повторяется.
Соединение инерционного стряхивателя 1 с рамой транспортера 2 посредством направляющей 7 с соосно установленными на ней упругими элементами (пружиной 14) позволяет улучшить маневренность работы инерционного стряхивателя при подходе к плодовому дереву.
Формула изобретения
Машина для уборки плодов, включающая транспортер, инерционный стряхиватель, улавливатели и привод, отличающаяся тем, что, с целью улучшения маневренности машины при подходе к плодовому дереву, инерционный стряхиватель соединен с рамой транспортера посредством направляющей с соосно установленными на ней упругими элементами.
2. Машина по п. 1, отличаюшаяся тем, что упругий элемент выполнен в виде пружины.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3623308, кл. 56-328, 1971.
2.Варламов Г. П. и др. Машина для формирования кроны и уборки плодово-ягодных культур. М., «Машиностроение, 1975, с. 103-105.
| название | год | авторы | номер документа |
|---|---|---|---|
| Плодоуборочная машина | 1976 |
|
SU627779A1 |
| Машина для уборки плодов | 1980 |
|
SU891017A2 |
| Машина для уборки плодов | 1985 |
|
SU1314976A1 |
| Машина для сбора плодов | 1985 |
|
SU1335172A1 |
| Плодоуборочная машина | 1979 |
|
SU990124A1 |
| Стряхиватель плодов | 1976 |
|
SU620238A1 |
| Стряхиватель плодов | 1978 |
|
SU731922A2 |
| УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ ПЛОДОВ С ДЕРЕВЬЕВ К ПЛОДОУБОРОЧНОМУ АГРЕГАТУ | 1973 |
|
SU376057A1 |
| УСТАНОВКА ДЛЯ СТРЯХИВАНИЯ ПЛОДОВ С ДЕРЕВЬЕВ | 1968 |
|
SU210544A1 |
| Комбайн для уборки плодов | 1990 |
|
SU1711711A1 |

