(54) ДАТЧИК ПЕРЕМЕЩЕНИЯ - ИНДУКТОКОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктосин | 1983 |
|
SU1136266A1 |
| Датчик положения - многоотсчетныйиНдуКТОКОР | 1977 |
|
SU817892A1 |
| Датчик перемещений | 1978 |
|
SU817893A1 |
| Датчик перемещений - индуктокор | 1976 |
|
SU817739A1 |
| Многоотсчетный датчик положенияи СпОСОб изМЕРЕНия пОлОжЕНия СпОМОщью дАТчиКА | 1976 |
|
SU817738A1 |
| Индуктосин | 1974 |
|
SU606192A1 |
| Синусно-косинусный датчик угла | 1976 |
|
SU652658A1 |
| Вращающийся трансформатор | 1989 |
|
SU1669058A1 |
| Двухотсчетный вращающийся трансформатор | 1989 |
|
SU1646023A1 |
| Синусно-косинусный датчик угла | 1978 |
|
SU765945A1 |
I
Изобретение относится к электротехнике и измерительной технике и может быть ис. пользовано в устройствах измерения перемещений подвижных узлов станков, машин и приборов.
Известны индуктивные датчики, называемые индуктосинами, содержащие ротор и статор, на которых расположены плоские печатные обмотки, выполненные из радиально расположенных последовательно соединенных проводников и имеющие вид периодического зигзага. На роторе, как правило, располагается одна непрерывная обмотка, а на статоре - две квадратурные обмотки, смещенные между собой на целое число периодов зигзага ± 1/4 часть периода 1.
Недостатком известного устройства является невысокая точность.
Наиболее близким к предлагаемому является индуктор, содержащий ротор и статор с плоскими печатными- обмотками, выполненными из радиально расположенных проводников и объединенными в группы, смещенные друг относительно друга в радиальном направлении, первая из которых содержит по две квадратурных обмотки на статоре и роторе, взаимная
индуктивность которых изменяется на Р периодов за один оборот ротора, состоящих из одинаковых в пределах обмотки секций, включенных встречно и согласно, имеющих по 2Nравномерно расположенных по окружности секций в каждой обмотке на статоре, а другие группы состоят из двух обмоток на роторе и одной на статоре, причем обмотки различных групп роторов соединены последовательно в короткозамкнутые цепи и количество секций каждой обмотки ротора в четное число раз меньше 2.
Недостаток указанного датчика состоит в невысокой точности из-за погрешности, создаваемой контурными токами секционированных обмоток.
Цель изобретения - повышение точности датчика перемещений.
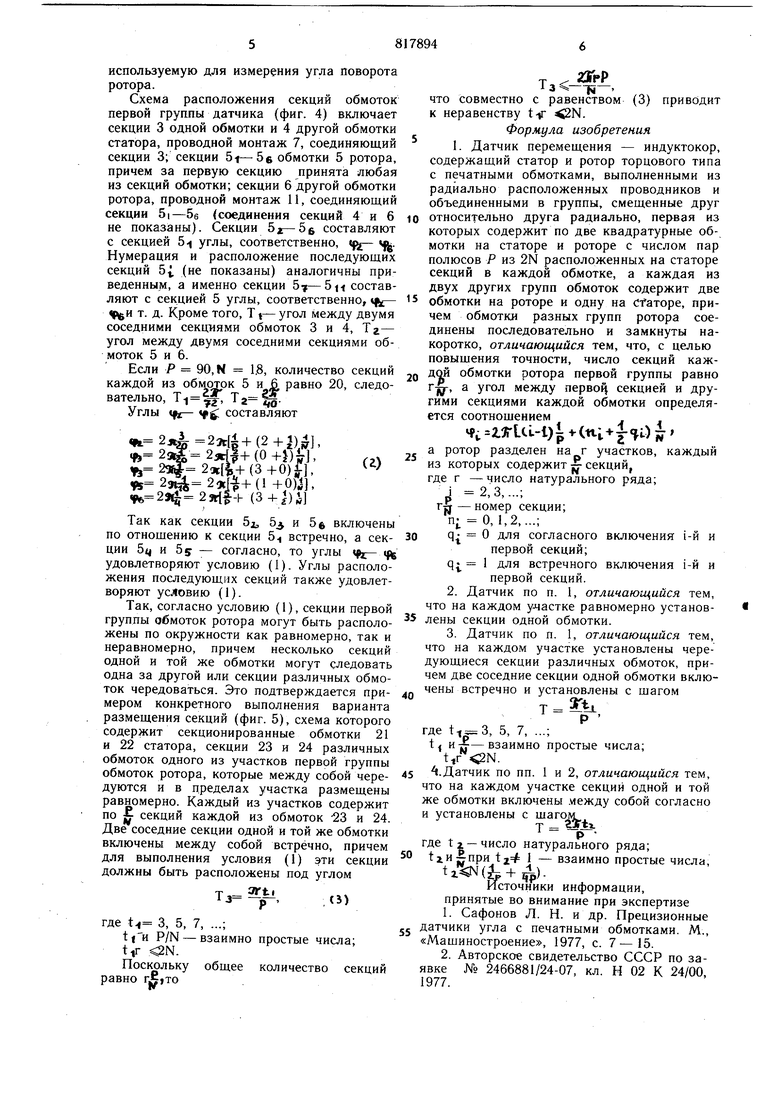
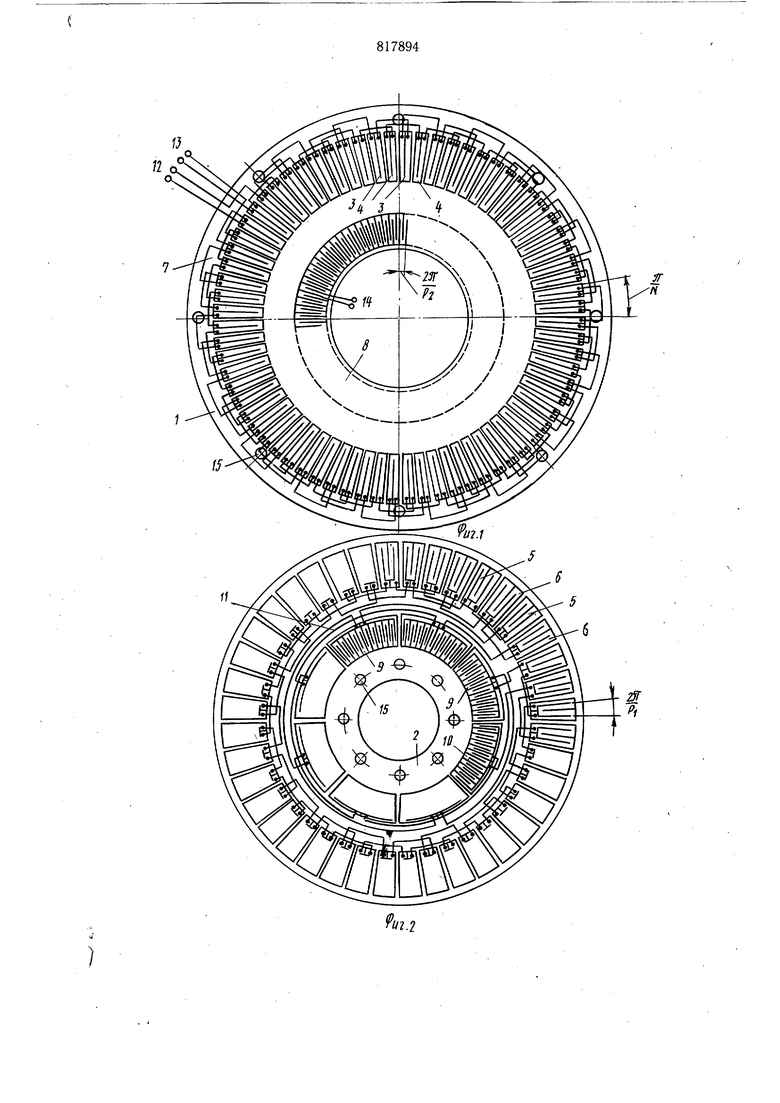
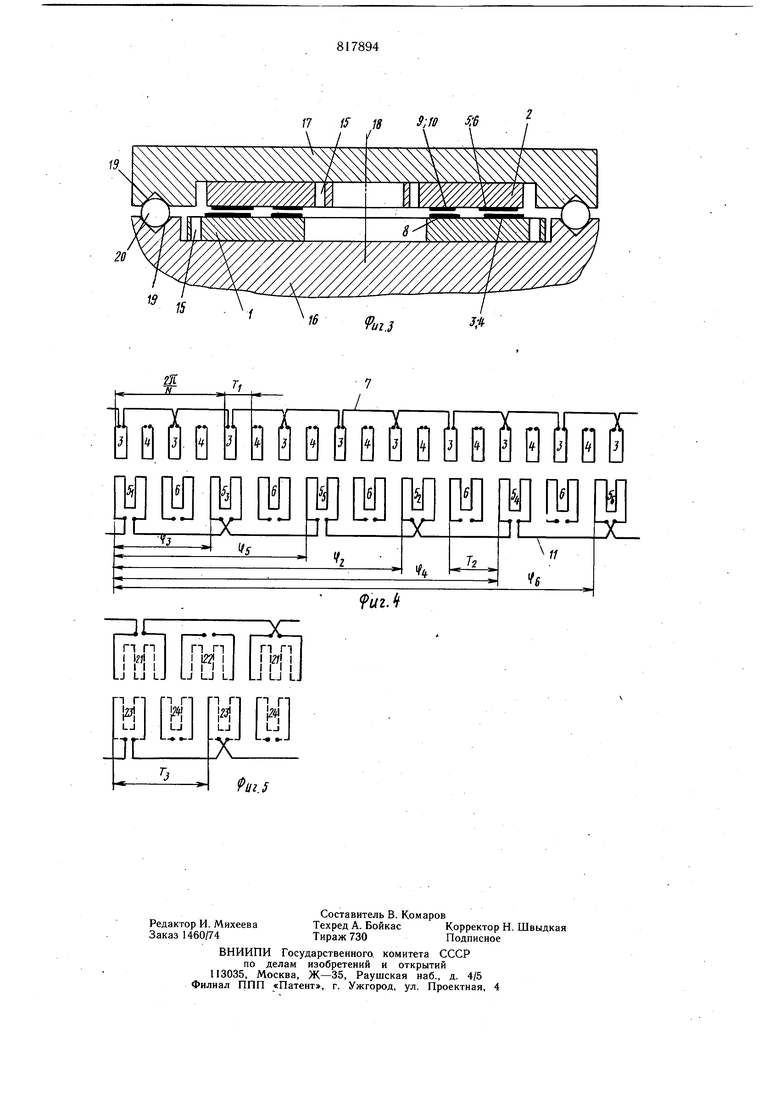
Указанная Цель достигается тем, что в индукторе, содержащем ротор и статор с плоскими печатными обмотками, выполненными из радиально расположенных проводников и объединенными в группы, смещенные друг относительно друга в радиальном направлении, первая из которых содержит по две квадратурнб1Х обмотки на статоре и роторе с числом пар полюсов Р из 2Н равномерно расположенных по окружности секций в каждой обмотке на статоре, а каждая из двух других групп обмоток содержит две обмотки на роторе и одну на статоре, причем обмотки различных групп ротора соединены последовательно и замкнуты накоротко, число секций каждой из обмоток первой группы ротора равно , угол между первой секцией и другими секциями каждой обмотки определяется соотношениемxp. 23ti{i-i)+ ()l,(0 а обмотка ротора разделена на группы, каждая из которых содержит P/Nсекций, гдет -число натурального ряда, i 2, 3, ...; г- - номер секции; til 0,1,2,...; qj О, когда i-я и первая секции включены согласно; q 1, когда i-я и первая секции включены встречно. Кроме того, возможно выполнение датчика с равномерной установкой секций одной обмотки на каждом участке секции. На каждом участке могут быть установлены чередующиеся секции различных обмоток, причем две соседние секции одной обмотки включены встречно и установлены с шагом -г ОТ t, где t 3,5, 7,...; t и P/N взаимно простые числа; ttP 2N. На каждом участке секции одной и той же обмотки могут быть включены между собой согласно и установлены с шагом Т 2aLU где tj-число натурального ряда; t ги при tg #. 1 - взаимно простые числа ат) На фиг. 1 представлен статор предлагаемого датчика; на фиг. 2 - ротор датчика; на фиг. 3 - установка датчика; на фиг. 4 - схема расположения секций обмоток первой группы датчика; на фиг. 5 - вариант обмоток датчика. Датчик перемеш,ения - индуктокор включает статор 1 и ротор 2, выполненные в виде дисков, на плоской поверхности которых укреплены печатные обмотки, состоящие из радиально расположенных проводников. Проводники соединены между собой последовательно для протекания тока в двух соседних проводниках в противоположном направлении, благодаря чему обмотки имеют вид периодического зигзага. Обмотки Я - б первой группы с периодом зигзага выполнены попарно квадратурными. Обмотки 3 и 4 состоят из одинаковых 2N секций каждая, которые включены относительно друг друга попеременно то встречно, то согласно при помощи проводного монтажа 7, проходящего по тыльной стороне статора. Секции имеют равномерное углово расположение по окружности с углом - между двумя близлежащими секциями одной и той же обмотки. Обмотки 5 и 6 также выполнены секционированными, состоящими из одинаковых секций. Секции обмоток 5 и 6 также размещеьГы равномерно по окружности, секции различных обмоток чередуются и в пределах обмотки секции включены попеременно то встречно, то согласно. Обмотки 8- 10 вто рой группы выполнены с периодом зигзага Обмотка 8 непрерывная, а обмотки 9 и 10 квадратурные, секционированные. Обмотки 5 и 9, а также 6 и 10 обьединены между собой последовательно в короткозамкнутой цепи. Проводной монтаж И, соединяющий секции и обмотки ротора, проходит по тыльной стороне ротора. ОбмотКи 3, 4 и 8 имеют, соответственно, выводы 12, 13 и 14. Кроме того, статор и ротор имеют крепежные отверстия 15. При этом Р-| 90, Рг 90, 2N 36, количество секций каждой из обмоток 5 и 6 равно 20 (г 4). Статор 1 крепится на неподвижной части поворотного устройства, например станине 16 поворотного стола, а ротор 2 - на подвижной его части - планщайбе 17 таким образом, что ось 18 вращения стола совпадает с осями вращения статора 1 и ротора 2, причем их печатные обмотки располагаются непосредственно друг против друга с зазором между ними, который, в зависимости от размеров датчика, выбирается равным 0,05-1,0 мм. Крепление ротора и статора осуществляется с помощью винтов (не показаны), проходящих сквозь отверстия 15. Станина 16 и планшайба 17 стола снабжены кольцевыми направляющими 19 с щариками 20, Обмотки датчика укреплены на основаниях статора 1 и ротора 2 с помощью связующего изолирующего слоя (не показан). Так как обмотки 3 и 4 расположены на одной кольцевой поверхности, они обозначены одной выносной линией. Аналогично обозначение обмоток 5 и 6 и обмоток 9 и 10. Обмотки 5 и 6 ротора расположены над обмотками 3 и 4 статора. Эти четыре обмотки составляют первую группу. Ко второй группе относятся обмотка 8 статора и расположенные над ней обмотки 9 и 10 ротора. При фазовом режиме работы обмотки 3 и 4 статора запитывают синусоидальными токами, смещенными между собой на 90°. При этом в обмотках 5 и 6 ротора наводится ЭДС и по соединенным с ним обмоткам 9 и 10 протекают токи, которые, в свою очередь, наводят в обмотке 8 статора ЭДС, используемую для измерения угла поворота ротора. Схема расположеиия секций обмоток первой группы датчика (фиг. 4) включает секции 3 одной обмотки и 4 другой обмотки статора, проводной монтаж 7, соединяющий секции 3; секции 5t--бе обмотки 5 ротора, причем за первую секцию принята любая из секций обмотки; секции 6 другой обмотки ротора, проводной монтаж 11, соединяющий секции 5i-5б (соединения секций 4 и 6 не показаны). Секции 5г-5 составляют с секцией 5 углы, соответственно, f Нумерация и расположение последующих секций 5| (не показаны) аналогичны приведенным, а именно секции составляют с секцией 5 углы, соответственно,ftt- и т. д. Кроме того, угол Между двумя соседними секциями обмоток 3 и 4, Т г- угол между двумя соседними секциями обмоток 5 и 6. Если Р 90,N 18, количество секций каждой из обмоток 5 и fi равно 20, следовательно, TI Т2. Углы (ft- «fg; составляют ,(2 + i), .ft 23g 2i{|+(0-f-J)j, ,-КЗ+0), (+р)1, Ve 2j 23rlfh (3+)i Так как секции 5 5 и 5 в включены по отношению к секции Ь встречно, а секции Ьц и 5 - согласно, то углы «fe «(% удовлетворяют условию (1). Углы расположения последующих секций также удовлетворяют условию (1). Так, согласно условию (1), секции первой группы обмоток ротора могут быть расположены по окружности как равномерно, так и неравномерно, причем несколько секций одной и той же обмотки могут следовать одна за другой или секции различных обмоток чередоваться. Это подтверждается примером конкретного выполнения варианта размещения секций (фиг. 5), схема которого содержит секционированные обмотки 21 и 22 статора, секции 23 и 24 различных обмоток одного из участков первой группы обмоток ротора, которые между собой чередуются и в пределах участка размещены равномерно. Каждый из участков содержит по секций каждой из обмоток 23 и 24. Две соседние секции одной и той же обмотки включены между собой встречно, причем для выполнения условия (1) эти секции должны быть расположены под углом Тз рЧ где t 3, 5, 7, ...; t IH P/N - взаимно простые числа; ttr N. Поскольку общее количество секций равно I -Р . 23рР 1 3 --Sf-. что совместно с равенством (3) приводит к неравенству t-ir N. Формула изобретения 1.Датчик перемещения - индуктокор, содержащий статор и ротор торцового типа с печатными обмотками, выполненными из радйально расположенных проводников и объединенными в группы, смещенные друг относительно друга радйально, первая из которых содержит по две квадратурные обмотки на статоре и роторе с числом пар полюсов Р из 2N расположенных на статоре секций в каждой обмотке, а каждая из двух других групп обмоток содержит две обмотки на роторе и одну на cfaTOpe, причем обмотки разных групп ротора соединены последовательно и замкнуты накоротко, отличающийся тем, что, с целью повышения точности, число секций каждои обмотки ротора первой группы равно г, а угол между первоц секцией и другими секциями каждой обмотки определяется соотнощением pc ina-i)(nL+j«fi)J- а ротор разделен на г участков, каждый из которых содержит секций, где г -число натурального ряда; i 2,3,...; Гд-номер секции; п- 0,1,2,...; q- о для согласного включения i-й и первой секций; q- 1 для встречного включения i-й и первой секций. 2.Датчик по п. 1, отличающийся тем, что на каждом yj4acTKe равномерно установлены секции одной обмотки. 3.Датчик по п. 1, отличающийся тем, что на каждом участке установлены чередующиеся секции различных обмоток, причем две соседние секции одной обмотки включены встречно и установлены с шагом 4Т tl где , 5, 7, ...; if и-j -взаимно простые числа; t,r N. .Датчик по пп. 1 и 2, отличающийся тем, что на каждом участке секции одной и той же обмотки включены между собой согласно и установлены с щагом т - - tx Р где t г -число натурального ряда; г I - взаимно простые числа. ti(+4V)Источникиинформации, принятые во внимание при экспертизе 1.Сафонов Л. Н. и др. Прецизионные атчики угла с печатными обмотками. М., «Машиностроение, 1977, с. 7-15. 2.Авторское свидетельство СССР по завке № 2466881/24-07, кл. Н 02 К 24/00, 1977.
17 15 J8 ;fff { /
/ f . / 00У0 A A Ы Л и J mmmmmm ir .: V ir wa. /.J b
