1
Изобретение относится к области автоматизации технологических процессов и может быть использовано для управления процессом перегрузки материала из машины в транспортное средство при их независимом движении, преимущественно при передаче урожая из уборочной сельскохозяйственной машины.
Известна система управления процессом перегрузки материала из уборочной сельскохозяйственной машины в транспортное средство, когда между транспортным средством и исполнительным механизмом перемещения выгрузного рабочего органа существует механическая связь 1. Она не позволяет управлять процессом при независимом движении уборочной машины и транспортного средства.
Известна система управления процессом перегрузки материала из уборочной сельскохозяйственной машины в транспортное средство, когда для контроля продольных отклонений транспортного средства относительно уборочной машины на остове последней установлено два фотоэлектрических датчика, реагирующих на вертикальную яркостную контрастную метку на борту. Для контроля поперечного расстояния между транспортным средством и уборочной машиной на выгрузном рабочем органе неподвижно относительно уборочной машины установлено четыре фотоэлектрических датчика, реагирующих на горизонтальную яркостную контрастную метку, нанесенную по верхней кромке борта, причем основными фотоэлектрическими датчиками являются только два из них, образующие совместно с двумя дополнительными фотоэлектрическими датчиками въездной сектор для облегчения водителю транспортного средства въезда в желаемое положение. Конструкция всех фотоэлектрических датчиков одинакова. Датчик выполнен в виде двухлинзового телеобъектива с встроенным фотоэлементом. Свет, отраженный от отметки и борта, преобразуется в электронной части устройства в электрические импульсы, причем светло-темный переход вызывает положительный импульс, а темно-светлый - отрицательный. Эти импульсы поступают на логическую схему, выходы которой связаны с показывающим устройством. Сигналы показывающего устройства информируют водителя уборочной машины о положении относительно последней транспортного средства. Посредством радиосвязи сигналы с показывающего устройства, установленного на уборочной машине, передаются к установленному на транспортном средстве показывающему устройству, которое используется для ручного управления процессом перегрузки урожая 2. Однако при работе с энергонасыщенной самоходной уборочной машиной, скорость которой велика и к тому же непостоянна, ручное управление процессом перегрузки урожая не позволит снизить до минимума потери урожая от непопадания в транспортное средство и тем более обеспечить равномерное заполнение последнего. Кроме того, недостатком устройства является необходимость оборудования каждого транспортного средства приемным и показывающим устройствами, что требует определенных технических и эксплуатационных затрат.
Целью настоящего изобретения является автоматизация процесса и уменьшение потерь материала при перегрузке.
Поставленная цель достигается тем, что фотоэлементы объединены в фотоэлектрический блок, который кинематически связан с выгрузным рабочим органом и козырьком и посредством управляющих устройств - с исполнительными механизмами.
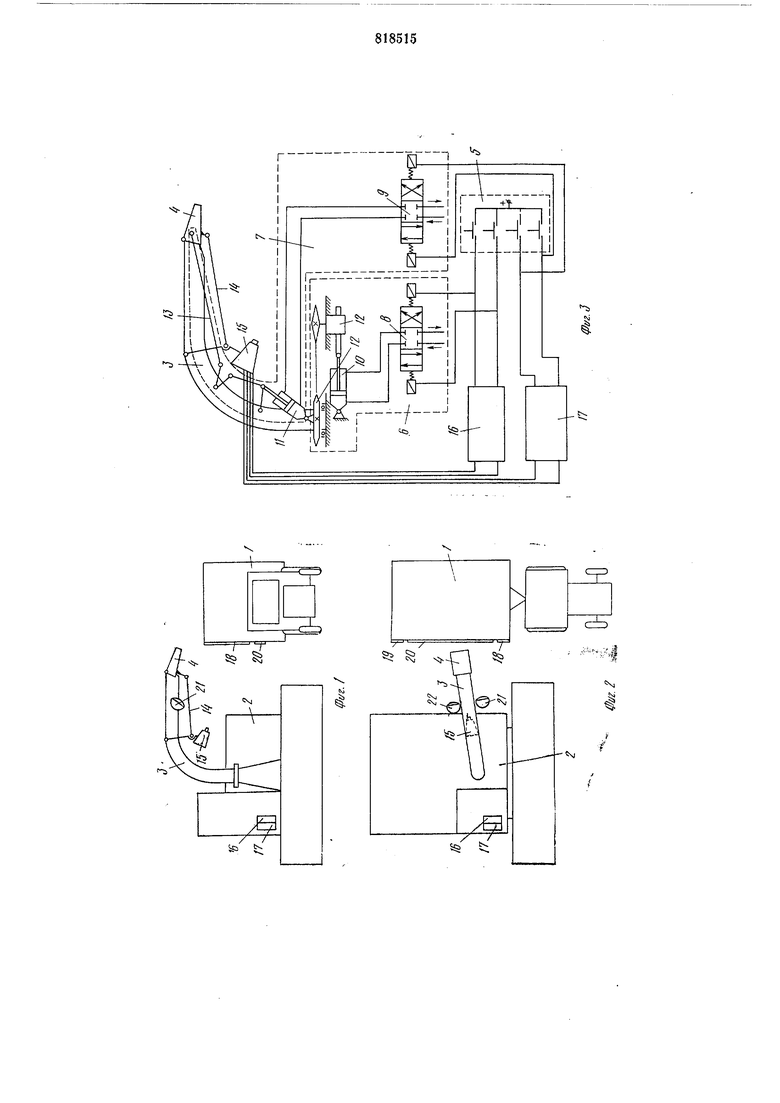
На фиг. 1 показан уборочный комплекс, вид спереди; на фиг. 2 - то же, вид сверху; на фиг. 3 схематично показана система управления процессом перегрузки материала; на фиг. 4 - устройство фотоэлектрического блока; на фиг. 5 изображена схема соединения фотоэлементов в фотоэлектрическом блоке.
Система управления процессом перегрузки материала из уборочной сельскохозяйственной машины 1 в транспортное средство 2 при их независимом движении включает выгрузной рабочий орган 3, выполненный поворотным в горизонтальной плоскости, козырек 4, выполненный поворотным в вертикальной плоскости (фиг. 1 и 2), причем выгрузной рабочий орган 3 и козырек 4 оборудованы электроуправляемыми от блока ручного управления 5 гидромеханическими исполнительными механизмами 6 и 7, которые состоят из гидрораспределителей 8 и 9, гидроцилиндров 10 и 11, приводных механизмов 12 и 13 для перемещения соответственно выгрузного рабочего органа 3 и козырька 4.
Выгрузной рабочий орган 3 и козырек 4 соединены кинематически посредством четырехзвенного шарнирного механизма 14 с фотоэлектрическим блоком 15, который соединен с управляющими устройствами 16 и 17, установленными в кабине уборочной сельскохозяйственной машины 1, выходы которых подключены к гидрораспределителям 8 и 9 (фиг. 3).
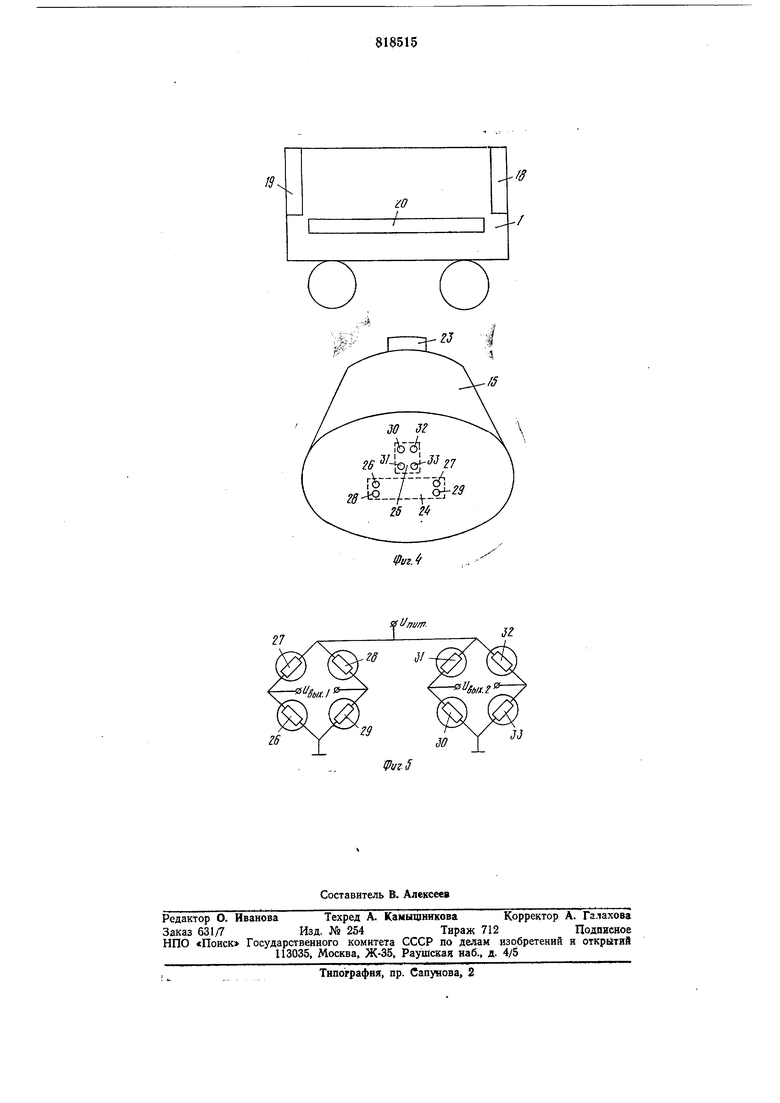
На борт транспортного средства 2 нанесены краской вблизи его правого и левого краев две вертикальные яркостные контрастные метки 18 и 19, а на определенном расстоянии от верхней кромки борта нанесена одна горизонтальная метка 20. Для их освещения в ночное время на выгрузном рабочем органе 3 установлены фары 21 и 22 (фиг. 1 и 2).
Фотоэлектрический блок 15 имеет объектив 23, в фокальной плоскости которого расположены горизонтальный 24 и вертикальный 25 ряды фотоэлементов, причем фотоэлементы 26-29 горизонтального ряда 24 и фотоэлементы 30-33 вертикального ряда 25 соединены в целях компенсации
изменения уробня естественной освещенности в мостовые схемы (фиг. 5). Порядок установки фотоэлементов 26-29 и 30-33 в фотоэлектрическом блоке 15 показан на фиг. 4.
Работает устройство следующим образом. При подходе порожнего транспортного средства 2, когда середина его борта окажется напротив выгрузного рабочего органа 3, комбайнер вводит машину в гон, предварительно включив управление устройств 16 и 17, лри этом с одного из двух выходов управляющего устройства 16 поступит сигнал к исполнительному механизму 6 и выгрузной рабочий орган 3 начнет перемещаться, например, по направлению движения часовой стрелки. А с одного из двух выходов управляющего устройства 17 поступит сигнал к исполнительному механизму 7 и козырек 4 также начнет перемещаться,
например подниматься, и так как фотоэлектрический блок 15 связан посредством четырехзвенного шарнирного механизма 14 с выгрузным рабочим органом 3 и козырьком 4, то фотоэлектрический блок 15 придет в движение как в горизонтальной, так и в вертикальной плоскостях.
Сигнал на выходе управляющего устройства 16, при котором выгрузной рабочий орган 3 перемещается по направлению движения часовой стрелки, сохраняется до тех пор, пока фотоэлементы 26 и 28 горизонтального ряда 24 не среагируют на яркостную контрастную метку 18, при этом на управляющее устройство 16 поступит сигнал
ограничения шага перемещения выгрузного трубопровода в вышеуказанном направлении, а управляющий сигнал на исполнительный механизм 6 поступит с другого выход управляющего устройства 16, что приведет к изменению направления перемещения выгрузного рабочего органа 3. Сигнал на выходе управляющего устройства 16, а следовательно и перемещение выгрузного рабочего органа 3 против направления движения часовой стрелки, сохраняется, пока: фотоэлементы 27 и 29 не среагируют на яркостную контрастную метку 19, при этом направление перемещения выгрузного рабочего органа 3 вновь изменится на направление, противоположное предшествующему, и т. д.
При .перемещении в горизонтальной плоскости выгрузного рабочего органа 3 фотоэлементы 30, 32 и 31, 33 вертикального ряда 25 реагируют на горизонтальную яркостную контрастную метку 20, а сигналы от них служат для ограничения шагов перемещения козырька 4 соответственно при его подъеме и опускании. Поэтому, если первоначально заданный сигнал от управляющего устройства 17 был на подъем козырька 4, то при реагировании на метку 20 фотоэлементов 31 и 33 управляющий сигнал не меняется, а при реагировании на метку 20 фотоэлементов 30 и 32 сигнал к исполнительному механизму 7 поступит с другого выхода управляющего устройства 17 и направление перемещения козырька 4, а вместе с ним и фотоэлектрического блока 15, изменится и сохранится до тех пор, пока от фотоэлементов 31 и 33 не поступит к управляющему устройству 17 сигнал на ограничение шага перемещения козырька 4 при его опускании. Подъем козырька 4 сменится опусканием при реагировании на метку 20 фотоэлементов 30 и 32 и т. д.
Таким образом, сигналы фотоэлементов горизонтального 24 и вертикального 25 рядов служат для бесконтактного ограничения щагов перемещений соответственно выгрузного рабочего органа 3 и козырька 4, при этом положение транспортного средства 2 отслеживается путем автоматической ориентации выгрузного рабочего органа 3 и козырька 4, по яркостным контактным меткам 18, 19 и 20 иа борту транспортного средства 2. При отходе загруженного транспортного средства 2 комбайнер выключает управляющие устройства 16 и 17, а при подходе порожнего транспортного средства их включает, и цикл повторяется.
Таким образом, система управления процессом перегрузки материала из уборочной сельскохозяйственной мащины в транспортное средство позволяет автоматизировать
процесс перегрузки, снизить потери урожая, обеспечить равномерное заполнение транспортного средства, повысить производительность уборочной сельскохозяйственной машины.
Формула изобретения
Система управления процессом перегрузки материала из уборочной сельскохозяйственной мащины в транспортное средство при их независимом движении, включающая выгрузкой рабочий орган с козырьком, фотоэлектрические датчики для обнаружения яркостных контрастных меток на борту транспортного средства, исполнительные и приводные механизмы, управляющие устройства, отличающаяся тем, что, с целью автоматизации процесса и уменьшения
потерь материала при перегрузке, фотоэлементы объединены в фотоэлектрический блок, который кинематически связан с выгрузным рабочим органом и козырьком и посредством управляющих устройств - с
исполнительными механизмами.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 505400, кл. А 01D 90/00, 1973.
2. Патент ГДР № 109975, кл. А 01В 69/00, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления выгрузным рабочим органом комбайна | 1980 |
|
SU884607A1 |
| Система автоматического управления выгрузным рабочим органом комбайна | 1985 |
|
SU1304775A2 |
| Устройство автоматического управления многосекционным транспортером сельскохозяйственной машины | 1990 |
|
SU1727589A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ЗАГРУЗКИ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2019940C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕГРУЗКОЙ УБРАННОЙ МАССЫ В СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЕ | 2005 |
|
RU2382544C2 |
| Выгрузной трубопровод сельскохозяйственной уборочной машины | 1984 |
|
SU1214008A1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ПАРАМЕТРОМ УБОРОЧНОЙ ЖАТКИ | 2019 |
|
RU2747303C2 |
| СПОСОБ УБОРКИ КАРТОФЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2479981C2 |
| ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЕ СРЕДСТВО ДЛЯ ОБРАБОТКИ АВТОМОБИЛЬНЫХ ДОРОГ И ТРОТУАРОВ ОТ СНЕЖНО-ЛЕДЯНЫХ ОБРАЗОВАНИЙ | 2018 |
|
RU2694608C1 |
| САМОДВИЖУЩАЯСЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА С ПОВОРОТНОЙ ВОКРУГ ВЕРТИКАЛЬНОЙ ОСИ УБОРОЧНОЙ НАСАДКОЙ | 2012 |
|
RU2603585C2 |
t
N
X
L
S
г
t-b
N Js
4-CM
xe
fe
.fff
23 I
ifluz.
if
JJ
dO
