г
С
Л 4 Лг;
QiU
(Л
ОО СХ) О5
о
О5 05
QiUll
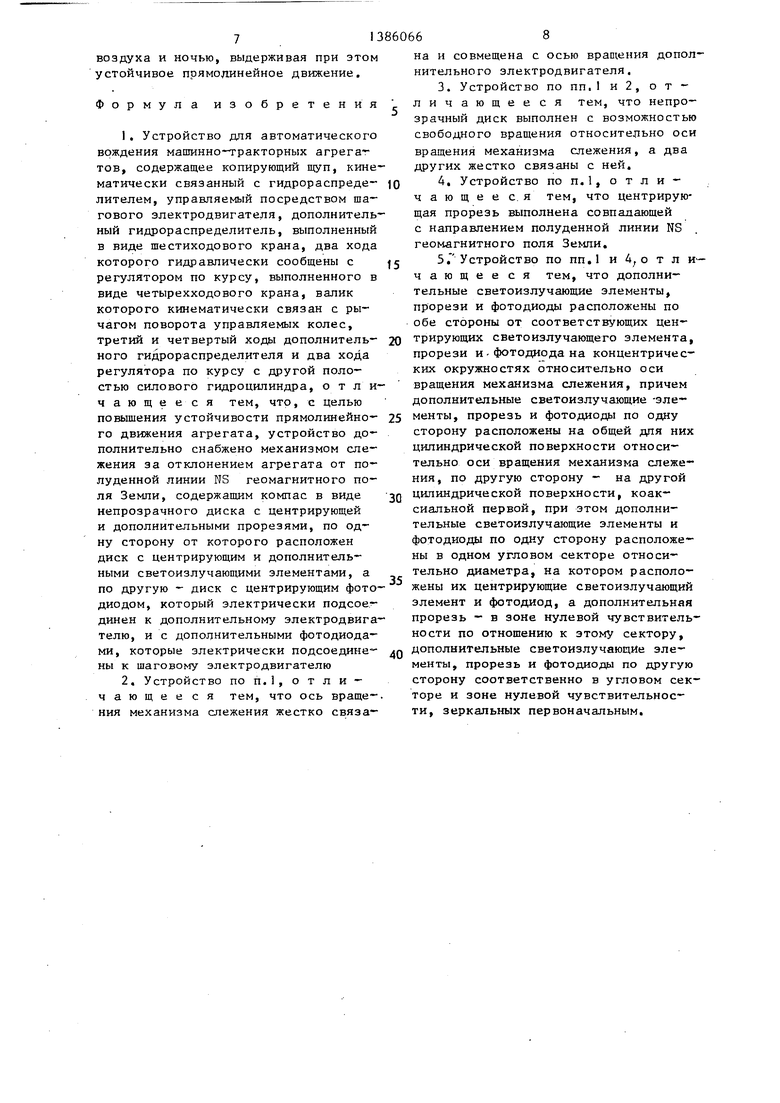
ния агрегата выбрана полуденная линия ИЗ геомагнитного поля Земли,- За отклонением от линии NS следит механизм 14 слежения. Механизм 14 содержит Три параллельных диска: центральный компас 15 с центрирующей 16 и дополнительными 17 и 18.. прорезями, крайний диск 19 со свето- излучающими элементами 20, 21, 22, крайний диск 23 с фотодиодами 24, 25, 26. При отклонении луч света через дополнительные прорези 17/и 18 в компасе поступает на фотодиоды 24, 25, 26, сигнал с которых обеспечивает поворот вала шагового электродвигателя 5 и связанного с ним валика 7 гидрораспределителя 8 для ликвидации линейного отклонения рамы ма- , вызванного поворачивающим моментом, агрегата с повернутыми управляющими колесами происходит до тех пор, пока из-за поворота рамы в сторону, обратную действию поворачивающего момента, в механизме слежения не перекрывается луч света. Подача электрического сигнала прекращается, вал шагового электродвигателя 5 и вал гидрораспределителя 8 возвращается в нейтральное положение, в работу вступает регулятор 9 по курсу для возврата управляемых колес в исходное положение с дальнейшей их блокировкой. 4 з.п. ф-лы, 6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения машинно-тракторного агрегата | 1982 |
|
SU1085537A1 |
| АГРОМАШИНА | 2004 |
|
RU2342821C2 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2001 |
|
RU2194297C1 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| Способ управления мобильным агрегатом и устройство для его осуществления | 1988 |
|
SU1808233A1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
| Тренажер для рулевых вертикальщиков | 1939 |
|
SU60187A1 |
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
Изобретение относится к сельг скохозяйственному машиностроению,. . Цель изобретения - повышение.устойчивости прямолинейного движения агрегата. За основной ориентир движе-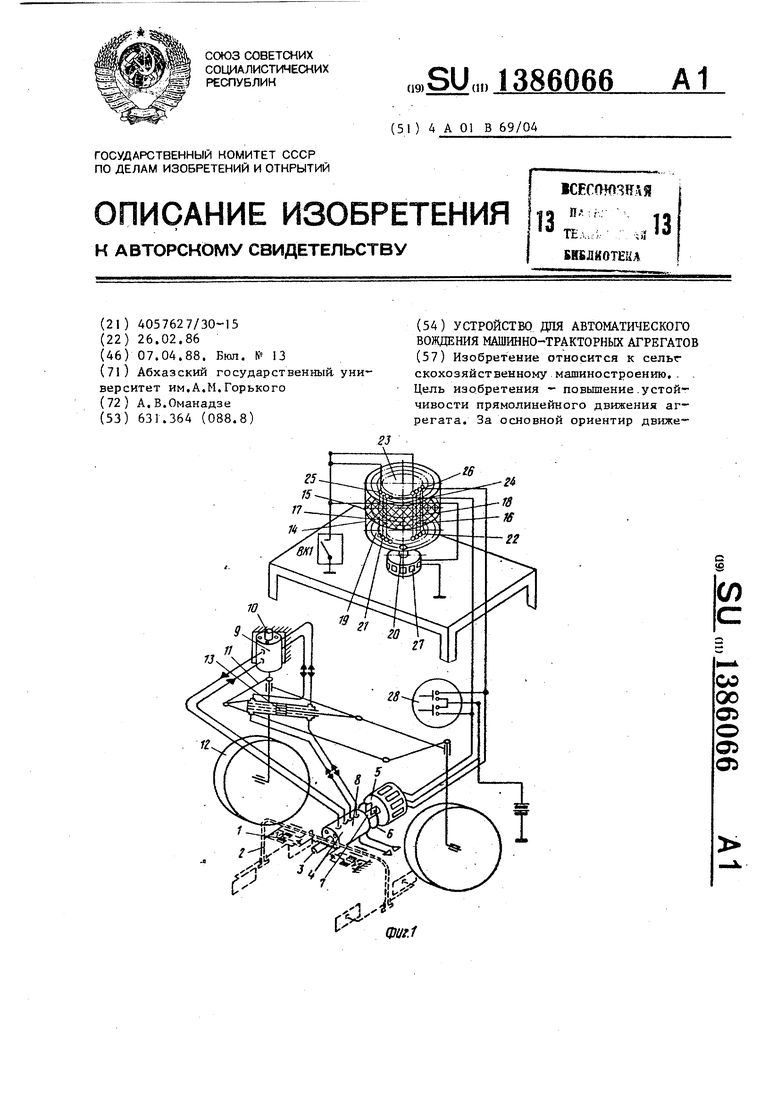
1
Изобретение относится к сельскохозяйственному мащиностроению, а именно к устройствам для автоматического вождения машинно-тракторных агрегатов (МТА).,
Цель изобрётания - повьпиение устойчивости прямолинейного движения агрегата.
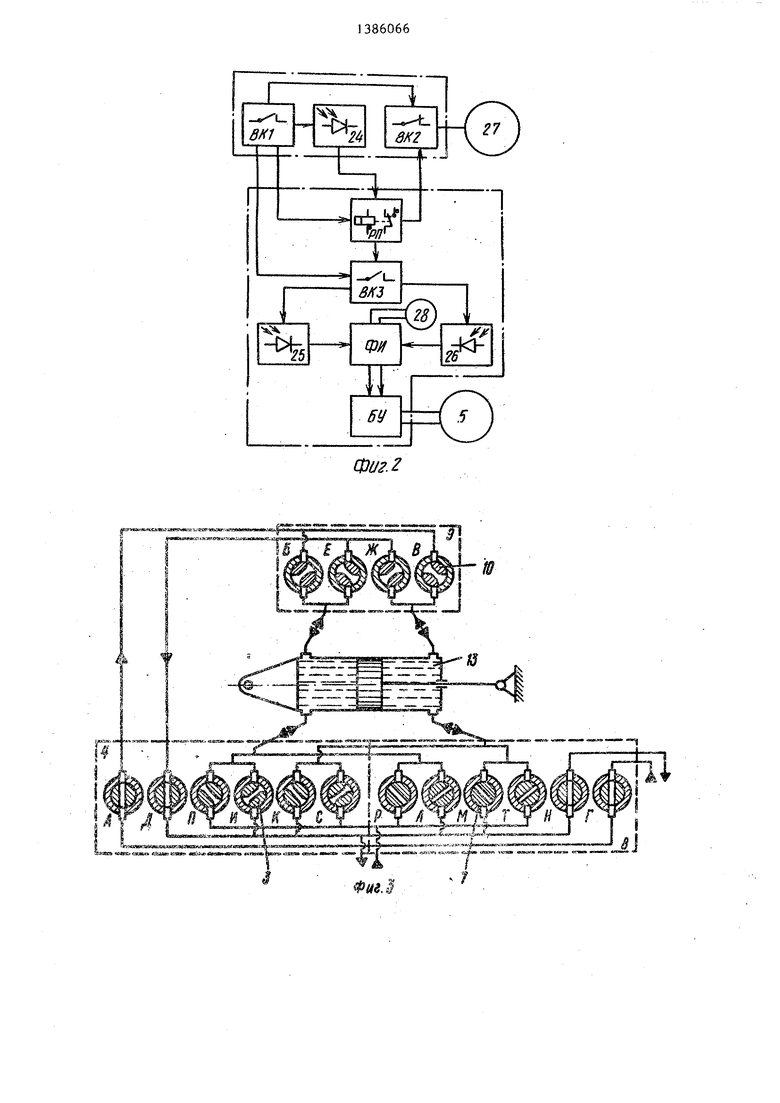
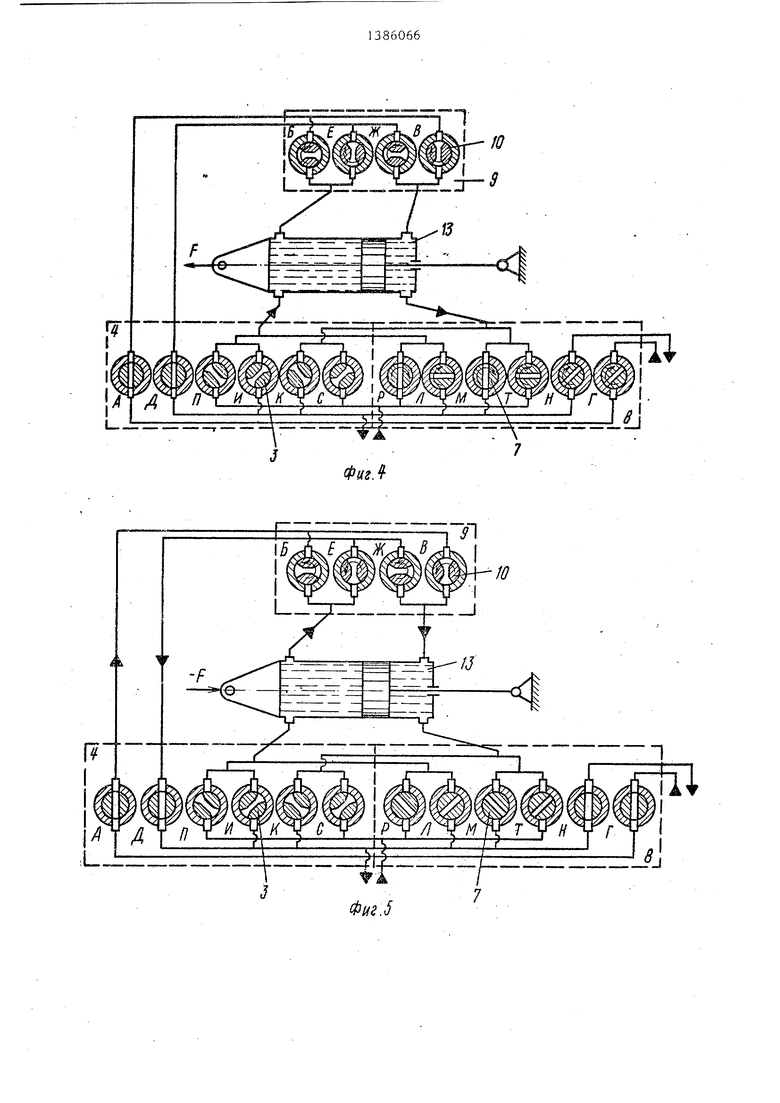
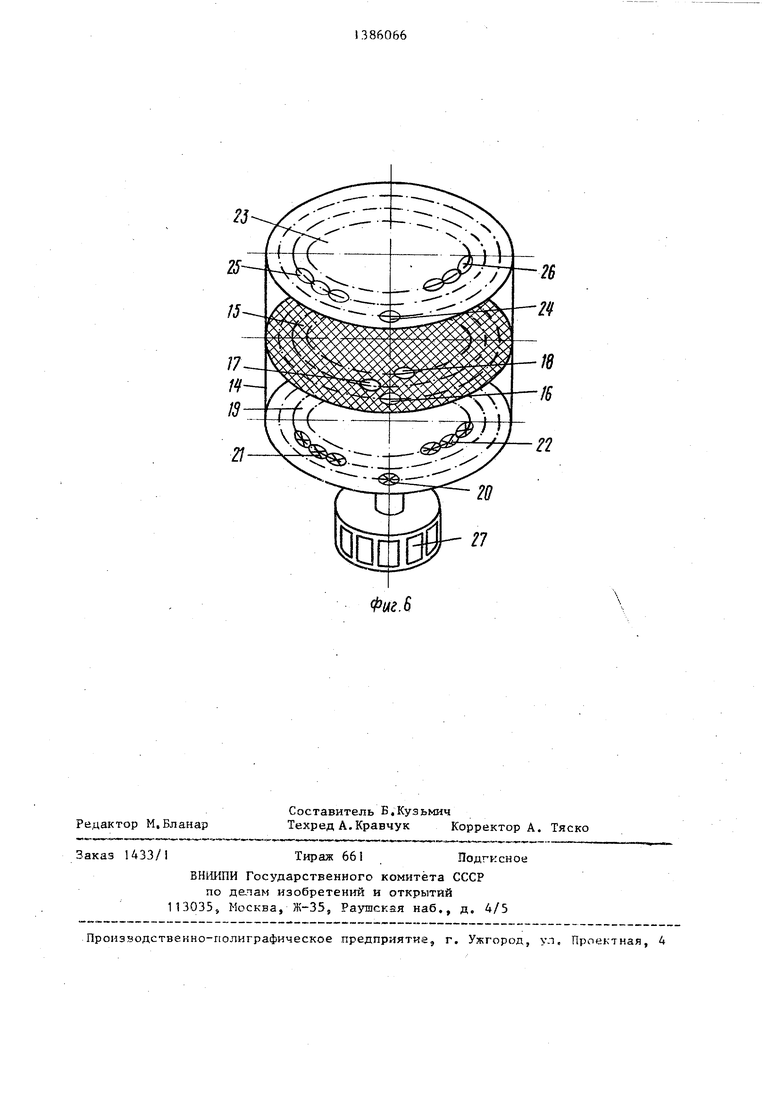
На фиг,1 схематически изображено устройство, общий ВИД; на фиг.2 - электрическая блок-схема управления МТА; на фиг.З - исходное положение валиков гидрораспрвделителЯр дополнительного гидрораспределителя и регулятора по курсу; на фиг,4 -.рабочее положение великов при обработке упрг1,вляющих сигналов, поступающих на шаговый двигатель; на фиг.5 - рабочее положение великов при возврате управляемых колес в нейтральное положение;- на фиг,6 - механизм слеже- кия.
Устройство для автоматического вождения МТА содержит самоустанавли- веющийся в нейтральное положение с помощью упругого звена I (фиг.1) копирующий щуп 2, который кинематически связан с валиком 3 гидрораспреде- лителя 4, шаговый электродвигатель 5 кинематически связан с самоустанавливающимся посредством упругого звена 6 валиком 7 дополнительного г идрораспределителя 8. Гидрораспреде
лителя 4 и 8 выполнены в виде щести- ходовых-кранов с соответствующими соосно устанавленными великами 3 и 7. Регулятор 9 по курсу выполнен в
виде четырехходового крана., валик 10 которого кинематически связан с рычагом 11 поворота управляемых колес 12 посредством силового гидроцилиндра 13. Механизм 14 слежения
состоит из компаса 15 виде непрозрачного диска с центрирующей прорезью 6, совпадающей с направлением полуденной линии геомагнитного поля Земли, и дополнительными прорезями 17 и 18. По одну сторону диска 15 расположен диск 19 с центрирующим светоизлу- чакщим элементом 20 и дополнительнь - ми светоизлучающими элементами 21 и 22, по другую - диск 23 с центрирующим фотодиодом 24 и дополнительными фотодиодами 25 и 26, Ось вращения механизма 14 слежения совпадает с осью вращения ;щсков 15, 19 и 23 и осью вращения дополнительного электродвигателя 27, содержащего самотормозящийся вал ( не показано ), при этом диск 5 и 23 жестко связаны с осью вращения механизма 14 слежения и его корпусом, который кинематически связан с валом электрсдвгггателя 27, Дополнительные светоизлучающие элементы 2 и 22, прорези 7 и 18 и электрическую цепь дополнительных
5
0
фотодиодов 25 и 26, которая состоит из двухпозиционного поляризованного реле РП, нормально разомкнутого электрического контакта БКЗ, дополнительных фотодиодов 25 и 26, узла формирования импульсов (ФИ) с дистанционным электрическим пультом 28, блока управления шаговым двигателем 5,
Гидрораспределитель 4 (фиг,3,4,5) посредством хода А с одной стороны гидравлически сообщен с ходами Б и В регулятора 9 по курсу, а с другой- с ходом Г гидрораспределителя 8 и с напорной магистралью гидронасоса. . ( не показан ), Ход Д идрораспреде- литель 4 гидравлически связан с одной стороны с ходами Е и Ж регулятс)- ра 9 по курсу, а с другой - с хода ми И и К гидрораспределителя 4, с ходами Л,М и Н гидрораспределитель 8 и со сливом. Ход П гидрораспределителя 4 гидравлически сообщен с одной сторрны с ходом И гидрораспределителя 4, с ходами Р и Л гидрораспределителя 8 и с бесштоковой полостью силового гидроцилиндра 13, а с другой - с ходом С гидрораспределителя 4, ходами.Р и Т гидрораспределителя 8 и с напорной магистралью. Ход К гидрораспределителя 4 гидравлически связан с одной стороны с ходом С гидрораспределителя 4, ходамиМ и Т 8 и со штоковой полостью силового гидроцилиндра 13, ас другой - с ходами И.и Д гидрораспределителя 4, ходами Л, М и Н гидрораспределитель 8 и со сливной магистралью. Ход Г гидрораспределителя 8 гидравлически сообщен с напорной магистралью гидронасосга а ход Н - со сливной магистралью. Ходы Б и Е регулятора 9 по курсу крана гидравлически связаны с безштоко- вой полостью гидроципиндра 13, а ходы В и Ж с его щтоковой полостью.
Ходы А и Д валика 3 и хода: Г и Н валика 7 выполнены параллельными межг ду собой. Ход П валика 3 выполнен параллельно ходу К валика 3 и ходами Р и М валика, 7, а ход И валика 3 параллельно ходу С валика 3 и ходам Л и Т валика 7, Ход Б валика 0 выполнен параллельным ходу Ж, а ход Е параллельным ходу В, .
Устройство для автоматического вождения МТА работает следующим обра- : зом.
Для осуществления движения TA по .прямолинейной траектории его выставг0
5
0
5
0
5
0
5
0
5
ляют так, что продольная ось трактора совпадает с предписываемой траекг торией движения, Выставление МТА происходит поочередным замыканием контактов дистанционного электрического . пульта 28, управляющего реверсивной работой шагового электродвигателя 5, который поворачивает в ту или иную стороны валик 7 дополнительного гидрег распределителя 8, В случае размыкания контактов дистанционного пульта 28 валик 7 с помощью упругого звена 6 самоустанавливается в нейтральное положение. При повороте посредством шагового электродвигателя 5 валика 7 дополнительного гидрораспределителя 8 по часовой стрелке (например, при замыкании одного из контактов пульта 28) происходит закрытие его ходов Г и Н (фиг,4) и ходов А и Д гидро-- распределителя 4, обеспечивая тем самым отсечение четырех ходов Б, Е, Ж и В регулятора 9 по курсу и одновременно открытие ходов Р и М допол - нительного гидрораспределителя,8, при этом через первый ход Р масло начинает поступать в бесштоковую полость силового гидроц11линдра 13 для перемещения порщня, выталкивающего масло на слив через ход М, Перемещаясь, шток силового гидроцилиндра 13 поворачивает рычаг 11 и управляе- bftiie колеса 12 направо. Одновременно с рычагом 11 поворачивается валик 10 регулятора 9 по курсу, обеспечивая при зтом открытие его ходов В и
Е.
Прекращение поворота управляемых колес 12 достигается размыканием контакта дистанционного электрического пульта 28, что приводит к обесточи- ванию шагового электродвигателя 5 и к самоустановлению валика 7 дополнительного .гидрораспределителя 8 посредством упругого звена 6 в нейтральное положение, что обеспечивает закрытие ходов Р и М и одновременное открытие ходов Г и Н дополнительного гидрораспределителя 8 и ходов А и Д гидрораспределителя 4, Через ход Г дополнительного гидрораспределителя 8, ход А гидрораспределителя 4 и ход В регулятора 9 по курсу масло начинает поступать в штоковую полость силового гидроцилиндра 13 для возвр щения управляеMbix колес 12 .в исходное положение с дальнейшей их фикса цией. Спив, масла осуществляется через ход,Е регулятора 9 по курсу, ход Д гидрораспределителя 4 и ход Н дополнительного гидрораспределителя 8, При возвращении управляемых колес 12 в исходное положение хода: В и Е регу лятора 9 по курсу перекрыты и поступление масла в силовой гидроцилиндр 13 прекращается.
Поворот управляемых колес 12 нале-ю в ту или иную сторону вала шагового
во достигается поворотом валика 7 дополнительного гидрораспределителя В против часовой стрелки посредством шагового электродвигателя 5 в случае замыкания другого контакта электрического дистанционного пульта 28, После того, как продольная ось агрегата выставлена по предписываемой траектории, в работу вводят механизм 14 слежения за полуденной линией NS геомагнитного поля Земли,, посредством включения электрического контакта ВК (фиг.2) если на центрирующий фотодиод 24 не попадает луч
света от центрирующего светоизлучаю- 25 соответствующий правый 25 или ле-
30
щего элемента 20 (фиг,1) через центрирующую прорезь 16, контакты ВК2 замкнуты, и в работу вступает электродвигатель 27, вал которого начинает механизм 14 слежения относительно полуденной линии NS геомагнитно го по Земли до того момента, когда центрирующая прорезь 16 не устанавливается по одной линии с центрирующим светоизлучающим элементом 20 и центрирующим фотодидом 24 так, что луч света от элемента 20 начинает по падать на фотодиод 24. При этом nor следний обеспечивает срабатывание поляризованного реле РП, которое с одной стороны размыкает электрический ВК1, электрический контакт ВК2, останавливая этим вращение вала электродвигателя 27, а с другой стороны замыкает электрический контакт ВКЗ, подсоединяя к работ 5 те дополнительные фотодиоды 25 и 26, пребывающие в этот момент в режиме д журства (фиг.2). Таким рбразом, устройство дпя автоматического вождения МТА по намечаемой прямолинейной траектории готово к работе.
В процессе движения,, в случае отклонения оси агрегата направо или налево относительно полуденной линии
35
40
50
вый 26 фотодиода4
После перекрытия диском компаса луча света подача электрических импульсов прекращается и вал шагового электродвигателя 5, а заодно с ним и валик 7 дополнительного гидрорас- пределителя 8 с помощью упругого звена 6 возвращаются в нейтральное поло- жение, от чего в работу вступает регулятор 9 по курсу дпя возврата управляемых колес 12 в исходное положение с дальнейшей их блокрфовкой в этом положении.
Беспрепятственное выстраивание МТА на любую новую траекторию движения обеспечивается благодаря использованию в электрической схеме механизма 14 слежения за полуденной линией NS геомагнитного поля Земли двухпозиционного реле РП,
Применение изобретения позволяет повысить эффективность использования машинно-тракторного агрегата в виду его противостояния отклонению от предписанного направления и обеспечивает рост производительности труда при посеве (посадке), обработке и планировке почвы и уборке различных сельскохозяйственных культур, возделываемых как на открытых (поNS геомагнитного поля Земпи происхог55 ле), так и закрытых (теплица) грун- дит включение правого 25 или левоготах МТА, снабженные предлагаемыми
26 фотодиодов механизма 14 Слежения от попадания через прорезь 17 или
устройствами, смогут работать на полях в случае большой запыленности
18 луча света, что приводит к формированию и усилению соответствующих импульсов в узле ФИ, после чего сформированные импульсы блоком управления распределяются по фазам шагового двигателя 5 в зависимости от срабатывания дополнительных фотодиодов 25 или 26, обеспечивая поворот
двигателя 5 и заодно с ним валика 7 дополнительного гидрораспределителя 8 для ликвидации линейного отклонения рамы машины, вызванного поворачивающим моментом, посредством поворота в противоположную сторону управляемых колес 12.
Движение МТА с повернутыми колесами 12 происходит до тех пор, пока
механизм 14 слежения из-за поворота рамь в сторону, обратную действию поворачивающего- момента, не перекроет луч G-вета, поступающего через дополнительную прорезь 17 или 18,
0
5
5
0
0
вый 26 фотодиода4
После перекрытия диском компаса луча света подача электрических импульсов прекращается и вал шагового электродвигателя 5, а заодно с ним и валик 7 дополнительного гидрорас- пределителя 8 с помощью упругого звена 6 возвращаются в нейтральное поло- жение, от чего в работу вступает регулятор 9 по курсу дпя возврата управляемых колес 12 в исходное положение с дальнейшей их блокрфовкой в этом положении.
Беспрепятственное выстраивание МТА на любую новую траекторию движения обеспечивается благодаря использованию в электрической схеме механизма 14 слежения за полуденной линией NS геомагнитного поля Земли двухпозиционного реле РП,
Применение изобретения позволяет повысить эффективность использования машинно-тракторного агрегата в виду его противостояния отклонению от предписанного направления и обеспечивает рост производительности труда при посеве (посадке), обработке и планировке почвы и уборке различных сельскохозяйственных культур, возделываемых как на открытых (поустройствами, смогут работать на полях в случае большой запыленности
воздуха и ночью, выдерживая при этом устойчивое прямодинейное движение.
Формула изобретения
в виде шестиходового крана, два хода которого гидравлически сообщены с регулятором по курсу, выполненного в виде четырехходового крана, валик которого кинематически связан с рычагом поворота управляемых колес, третий и четвертый ходы дополнительного гидрораспределителя и два хода регулятора по курсу с другой полостью силового гидроцилиндра, о т л и чающееся тем, что, с целью повышения устойчивости прямолинейно- го движения агрегата, устройство дополнительно снабжено механизмом слежения за отклонением агрегата от полуденной линии NS геомагнитного поля Земли, содержащим компас в виде непрозрачного диска с центрирующей и дополнительными прорезями, по одну сторону от которого расположен диск с центрирующим и дополнительными светоизлучающими элементами, а по другую - диск с центрирующим фотодиодом, который электрически подсоег динен к дополнительному электродвигателю, и с дополнительными фотодиодами, которые электрически подсоединены к шаговому электродвигателю
2, Устройство по п.1, о т л и - чающее ся тем, что ось враще- ния механизма слежения жестко связа
15
20
25 860668
на и совмещена с осью врап1ения дополнительного электродвигателя.
менты, прорезь и фотодиода по одну сторону расположены на общей для них цилиндрической поверхности относительно оси вращения механизма слежения, по другую сторону - на другой цилиндрической поверхности, коаксиальной первой, при этом дополнительные светоизлучающие элементы и фотодиоды по одну сторону расположены в одном угловом секторе относительно диаметра, на котором расположены их центрирующие светоизлучающий элемент и фотодиод, а дополнительная прорезь - в зоне нулевой чувствительности по отношению к этому сектору, дополнительные светоизлучающие элементы, прорезь и фотодиоды по другую сторону соответственно в угловом секторе и зоне нулевой чувствительности, зеркальных первоначальным.
ф1/.2
Фа.
Фиг.
:L
Ю
2J
Фиг.6
