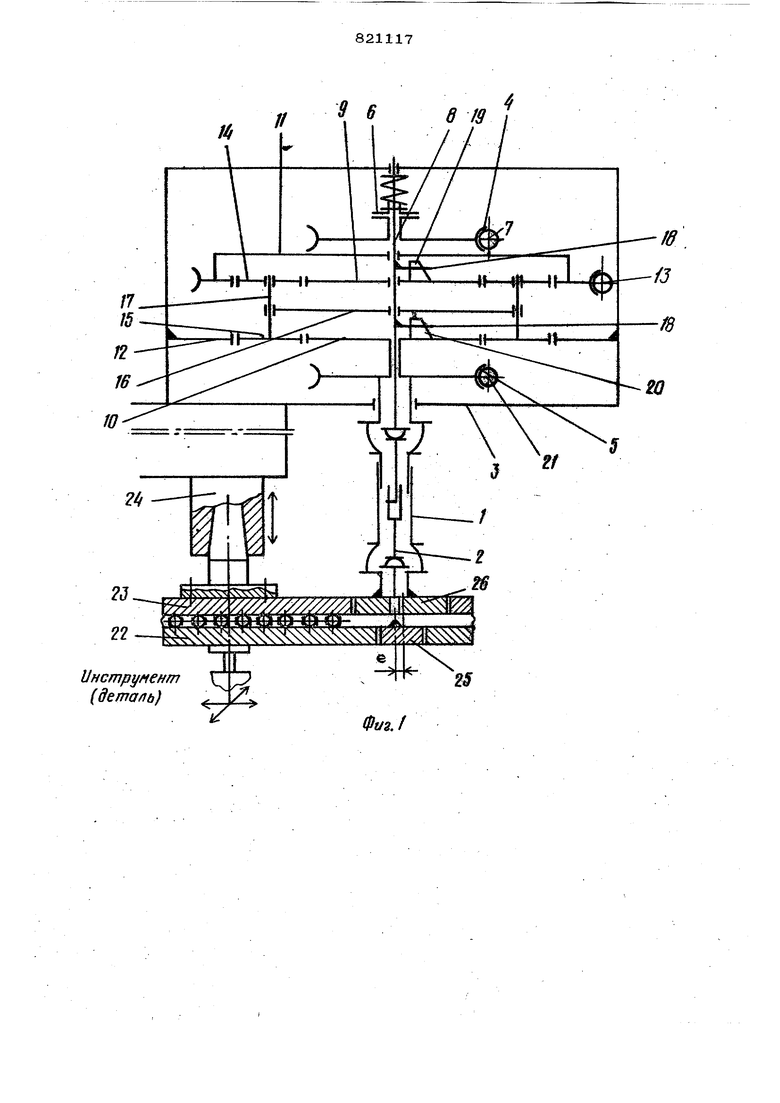
(54) УСТРОЙСТВО К ЭЛЕКТРОЭРС8ЖЖНОМУ СТАНКУ ДЛЯ СООБЩЕНИЯ КРУГОВОГО ПОСТУПАТЕЛЬНССО ЭЛЕКТРОДУ 3. происходит по поверхности межцу валом .и втулкой. Следящий электродвигатель в предлагаемом устройстве не реверсируется, а лишь меняет скорость вращения в зависи мости от состояния эрозионного промежу ка (число, оборотов слеа5пцего двигателя больше, равно или меньше числа оборотов опорного двигателя). Вследствие этого, привод подачи следящего двигателя имеет постоянно выбранные люфты, так как вращение электродвигателя осуществляется в одну сторону, , На фиг. 1 показана кинематическая схема устройства} на фиг. 2 - механизм действия упоров. Устройство состоит из двух разъединя ющихся и расположенных один в другом карданных тепескопических валов 1 и 2. Механизм регулирования радиуса траектории включает корпус 3, червячные пары 4 и 5, предохранительную фрикционную муфту 6, передающую крутящий момент от следящего электродвигателя 7 на вал 8 двухрядного планетарного редуктора. Редуктор состоит из двух солнечных колес 9 и 10, свободно установленных на валу 8, двух коронных колес 11 и 12, из которых колесо 12 жестко соединено с корпусом 3, .а колесо 11 свободно сидит на валу 8| одновременно является червячным и связано с шаговым двигателем 13, двух спаренных колес сателлитов 14 и 15 и водила 16, свободно сидяще го на валу 8. При этом сателлит 14 и води ло 16 свободно установлены на оси 17, а сатеплит 15 жестко связан с этой ось солнечное колесо 10 выполнено в одном блоке с червячным колесом 5. Вал 8 не сет на себе повоаок, выполненный в виде двух штифтов 18, установленных между двумя упорами 19 и 2О, закрепленными соответственно на солнечных колесах 9 и 1О, .и приводимых во вращение с одинаковыми угловыми скоростями опорным электродвигателем 21. Механизм, задающий движение инстру менту (детали) представляет собой две нижнюю (подвижной элемент) 22 которая может перемещаться в двух вза имно перпендикулярных направлениях, и верхнюю (неподвижный эпемент) 23, закрепленную в шпинделе станка 24. Коне вала 2 выполнен в виде эксцентрика 25 установленного в нижней плите 22, а ко ,нец вала 1 представляет собой эксцентриковую втулку 26, установленную в пп те 23. Эксцентрик 25 и втулка 26 име ют одинаковые эксцентриситеты. 7 Устройство работает следующим образом. Котда эксцентриситеты эксцентрика 25и втулки 26 суммируются, плита 22 при работе устройства совершает движение осцилляции с наибольшим радиусом (амплитудой) траектории движения, когда они вычитаются - радиус равен нулю, в промежуточных положениях - радиус изменяется плавно. Положение эксцентрика 25 и втулки 26относительно друг друга определяется угловыми скоростями валов 1 и 2. При этим вал 1 приводится во вращение от опорного двигателя 21 через червячную пару 5, а вал 2 - от следящего двигателя 7 через червячную пару 4 и предохранительную фрикционную муфту 6, Установка определенного эксцентриситета в данном устройстве производится путем поворота упора 19 относительно упора 20 на некоторый угол oL Этот поворот осуществляется перёд гм в процессе работы шаговым двигателем 13 через колеса 11 и 12 по соответствукщей программе путем увеличения или уменьшения скорости вращения солнечного колеса 9 относительно солнечного колеса 1О. Постоянство установленного угла об в процессе работы обеспечивается тем, что при вращении опорного двигателя 21 колеса 9 и 10 с упорами 19 и 20 получатют одинаковое приращение количества движения, так как количество зубьев сателлитов 14 и 15 и солнечных колес 9 и 1О соответственно равны, а колеса 11 и 12 неподвижны. Если включен только опорный двигатель 21, имеющий постоянную угловую скорость, а следящий двигатель 7 отключен, то нижний штифт 18 поводка прижат к упору 2О, а червячное колесо 4 проскальзывает .относительно муфты 6. Эксцентрик 25 и втулка 26 не разворачиваются относительно друг и величина эксцентриситета равна нулю. При вклкиении следящего двигателя устройство начинает работать какорбитальная головгса. Здесь возможны три ситу л.оп. , ации: ,.,e. « . w.pc«5. Чл.оп., где У - напряжение на эрозионном промежутке; У - рабочая величина напряжения на эрозионном промежутке, при котором идет процесс обработки; - угловая скорость следящего двигателя; HQ-- угловая скорость опорного двигателя. Очевидно, что при Ugri J pas сл довательно hc Ijjp, нижний штифт 18 поводка отойдет от упора 2О на некоторый угоп cL), при котором на эрозионно промежутке реализуется условие и, как результат, Ис,л оп Вследствие этого эксцентрик 25 повернется относи телыю втулки 26 и установится некото рый эксцентриситет. По мере съема металла и увеличения межэлектродного промежутка опять создадутся условия, при которых и Исл on Р этом величина эксцентри ситета стремится к заданной величине, т,е , ot --rri. В результате верхний штифт поводка 18 начнет контактировать с упором 19, чго ограничит дальнейший поворот эксцен рика 25 относительно втулки 26. Если в процессе обработки возникает необходимость дальнейшего изменения ве личины эксцентриситета, то включается шаговый двигатель 13 и угол псворота между упорами 19 и 2О изменится на величину cL 1Ло1-Это создает условия дл соответствующего поворота эксцентрика 25 относительно втулки 26. Эксцентриситет осцилляции находится в функциональной зависимости от напряжения на эрозионном промежутке, т.е. е - IF(U) в случае Jan Jpas и . -е в условиях предкороткого или короткого замыкания, нижний штифт 18 поводка мо- жет прийти в контакт с упором 20, при-i чем эксцентриситет будет равен нулю (е О) и эксцентр. к 25 и втулка 26 встанут в нулевое положение. Формула и э,о бретения 1. Устройство к электроэрознонному станку для сообщения кругового поступательного движения эяектроду, снабженное механизмом регулирования радиуса траектории в спедяцем режиме, выполненном в виде кинематически связанных между собой экоаеитриковой втулки и эксцентрикового вала, связатюго с электродом, сяабженное слеи$ш1им и опорным электроавй- гателями, взаимодействующими соответственно с экбцентрвксюым валом и эксцентриковой втулкой, отличающееся тем, что, с целью повышения надежности и точности работы устройства, механизм регулирования радиусе траектории выполнен в виде поводка, состоящего из двух штифтов, связанных с эксцентриковым валом и предназначен для взаимодействия с упорами, установленными на солнечных колесах двухрядного планетарного редуктора, связывающего эксцентриковый вал с эксцентриковой втyлкok, причем упоры развернуты один относительно другого на угол, соответствующий задань му радиусу траектории. 2. Устройство по п. 1, о т л и ч а ю щ е е с я тем, что, с целью обеспегчеиия возможности изменения радиуса траектории в процессе обработки в него ввеаен шаговый электродвигатель, кинематически связанный с эксцентриковым валом. Источники информации, принятые во внимание при экспертизе 1. Электрофизические и электрохимиеские станки. Каталог, М., 1978, НИИмаш), с. 71-73. 9
„„ tLl 80 tb ВД ад HJ (Ц -«у-, Ж и
VHcmpyfiCHm (деталь)
2§
0t/g./ 6
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство орбитального перемещения при электроэрозионной обработке | 1982 |
|
SU1068246A1 |
| Электромеханический привод гребного винта судна | 2015 |
|
RU2622175C1 |
| МЕХАНИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2007 |
|
RU2334143C1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| Механический пресс | 1990 |
|
SU1719243A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕСА ШАССИ САМОЛЕТА И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583535C1 |
| "Устройство для обработки трехмерных поверхностей | 1973 |
|
SU485850A1 |
| Привод шпинделя для вибрационного резания | 1980 |
|
SU933293A1 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРОДУГОВОЙ ПРИВАРКИ ТРУБ | 1967 |
|
SU195581A1 |
| Радиально-поршневой эксцентриковый насос | 1975 |
|
SU514968A1 |