1
Изобретение относится к станкостроению, а именно к следящим устройствам гидропривода станков, а также к устройствам, обеспечивающим шпинделям станков наряду с полностью жидкостным трением микроперемещения.
Известна гидростатическая опора, содержащая втулку, охватывающую цапфу вала с несущими карманами, торцовую камеру подвода рабоуей жидкости и камеру слива, а также входной дроссель, расположенный между торцовой камерой подвода и несущими карманами, и выходной дроссель - между несущими карманами и камерой слива 1
Недостатком известной опоры является мала/7 надежность в работе в результате засорения и облитераций щелей.
Цель изобретения - повьшение надежности работы путем обеспечения орбитального движения вала и уменьшения габаритов.
Указанная цель достигается тем, что несущие карманы расположены по винтовой линии с угловой протяженностью не менее 130°, при этом дроссели образованы рабочими поверхностями втулки и цапфы вала.
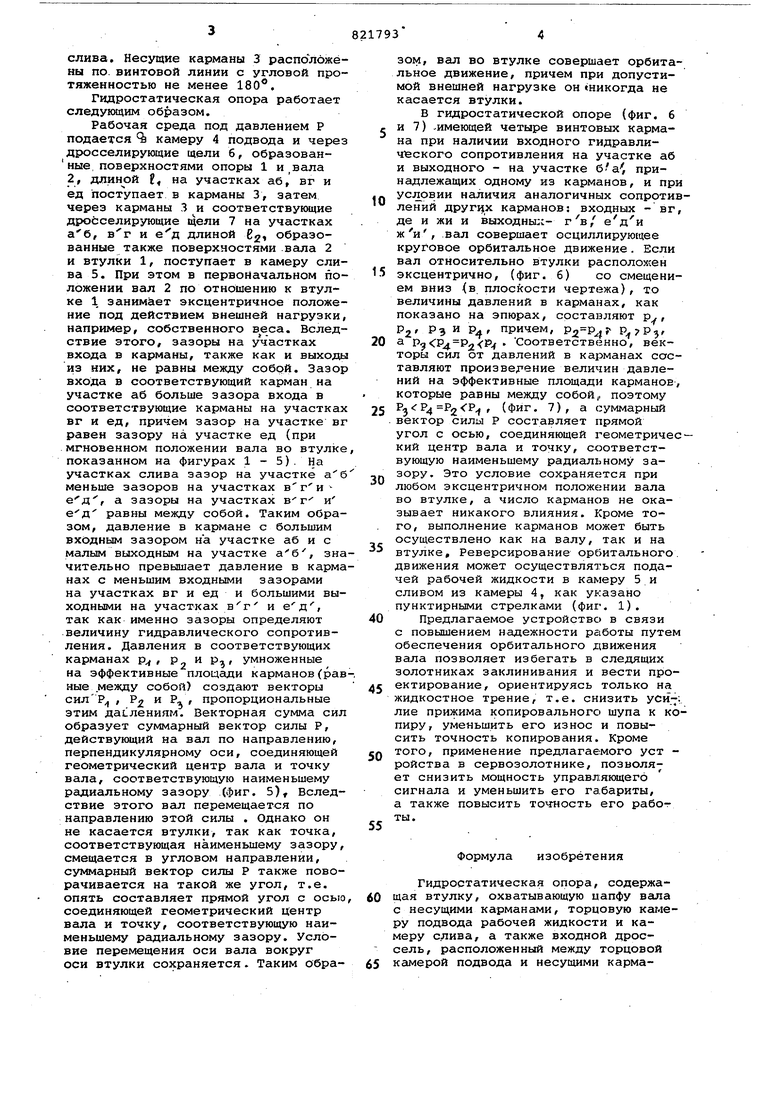
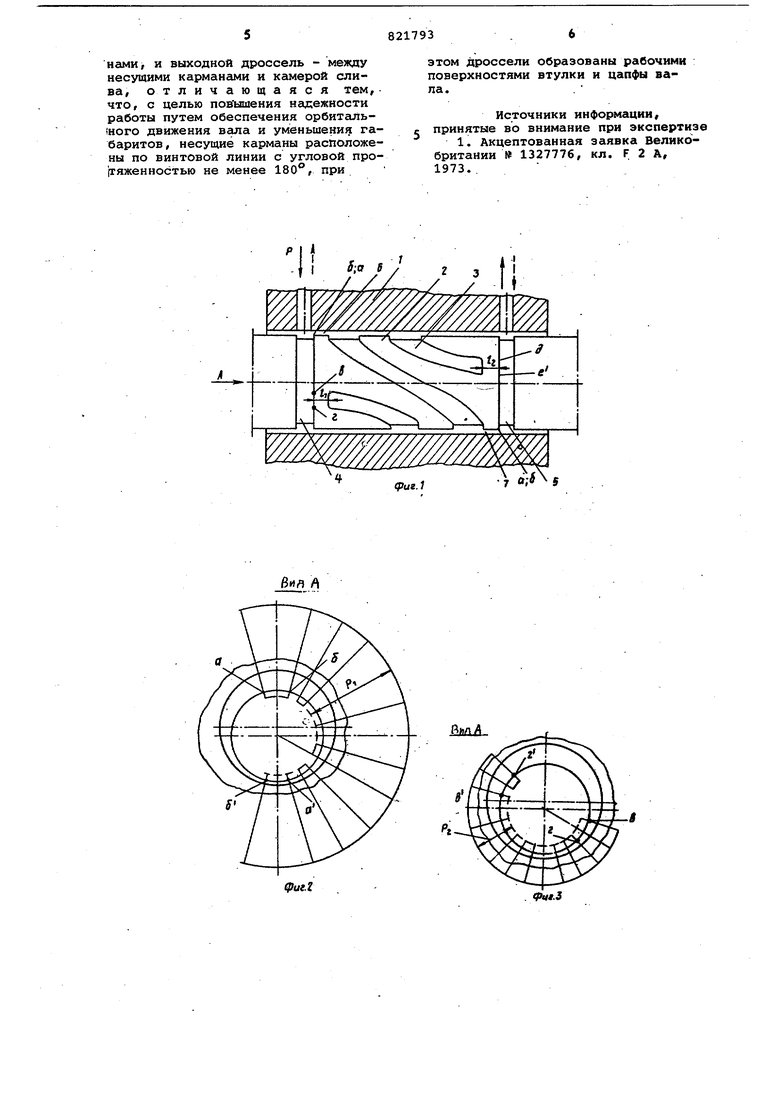
На фиг. 1 изображена гидростатическая опора с тремя несущими карманами, продольный разрезJ на фиг.2вид А на фиг. 1 и эпюра давлений в одном из карманов; на фиг. .3 то же, но с эпюрой давлений в соседнем кармане; на фиг. 4 - то же, но с эпюрой давлений в третьем кармане опоры; на фиг. 5 представлена
0 векторная диаграмма мгновенных значений сил от давлений в трех карманах, а также показан результат сложения векторов этих сил} на фиг. 6 показаны эпюры давлений в несущих
5 карманах при числе их, равном четырем; на фиг. 7 - векторная диаграмма мгновенных значений сил от давлений в карманах и результирующий вектор силы.
0
Гидростатическая опора состоит из втулки 1, в которой расположен вал 2 с выполненными на нем тремя несущими карманами 3, торцовой камеры 4 подвода рабочей жидкости и камеры
5 слива 5. Входной дроссель в виде дросселирукмцей щели б расположен между камерой 4 подвода и несущими карманами 3, выходной дроссель в виде дросселирующей щели 7 - между несущими карманами 3 и камерой 5
0
слива. Несущие карманы 3 расположёны по. винтовой линии с угловой протяженностью не менее 180.
Гидростатическая опора работает следующим образом.
Рабочая среда под давлением Р подается % камеру 4 подвода и через дросселирующие щели б, образованные, поверхностями опоры 1 2, длинной 2i на участках аб, вг и ед поступает в карманы 3, затем через карманы 3 и соответствующие дросселирующие щели 7 на участках аб, вг и ед длиной ggi образованные также поверхностями вала 2 и втулки 1, поступает в камеру слива 5. При этом в первоначальном положении вал 2 по отношению к втулке 1 занимает эксцентричное положение под действием внешней нагрузки, например, собственного веса. Вследствие этого, зазоры на участках входа в карманы, также как и выходы из них, не равны между собой. Зазор входа в соответствующий карман на участке аб больше зазора входа в соответствующие карманы на участках вг и ед, причем зазор на участке вг равен зазору на участке ед (при мгновенном положении вала во втулке показанном на фигурах 1 - 5). На участках слива зазор на участке меньше зазоров на участках вгиед, а зазоры на участках вг- и е д равны между собой. Таким образом, давление в кармане с большим входным зазором на участке аб и с малым выходным на участке а б , значительно превышает давление в карманах с меньшим входными зазорами на участках вг и ед и большими выходными на участках в г и е д , так как именно зазоры определяют -величину гидравлического сопротивления. Давления в соответствующих карманах р, р и р, умноженные на эффективные плоцади карманов (рав ные между собой) создают векторы силР , Р и Р. , пропорциональные этим давлениям. Векторная сумма сил образует суммарный вектор силы Р, действукмций на вал по направлению, перпендикулярному оси, соединяющей геометрический центр вала и точку вала, соответствующую наименьшему радиальному зазору (фиг. 5), Вследствие этого вал перемещается по направлению зтой силы . Однако он не касается втулки, так как точка, соответствующая наименьшему зазору, смещается в угловом направлении, суммарный вектор силы Р также поворачивается на такой же угол, т.е. опять составляет прямой угол с осью соединяющей геометрический центр вала и точку, соответствующую наименьшему радиальному зазору. Условие перемещения оси вала вокруг оси втулки сохраняется. Таким образом, вал во втулке совершает орбитальное движение, причем при допустимой внешней нагрузке он «никогда не касается втулки.
В гидростатической опоре (фиг. 6 и 7) -имеющей четыре винтовых кармана при наличии входного гидравлического сопротивления на участке аб и выходного - на участке ба принадлежащих одному из карманов, и при условии наличия аналогичных сопротивлений других карманов: входных - вг, де и жи и выходных- гв/ еди ж и , .вал совершает осциллирующее круговое орбитальное движение. Если вал относительно втулки располохсен эксцентрично, (фиг. 6) со смещением вниз (в плоскости чертежа), то величины давлений в карманах, как показано на эпюрах, составляют р., Р2 РЗ РЛ причем, Соответственно, векторы сил от Давлений в карманах составляют пронзвер&нке величин давлений на эффективные площади карманов, которые равны между собой,, поэтому Pj Р4 г (фиг. 7), а суммарный вектор силы Р составляет прямой угол с осью, соединяющей геометрический центр вала и точку, соответствующую наименьшему радиальному зазору. Это условие сохранябгтся при любом эксцентричном положении вала во втулке, а число карманов не оказывает никакого влияния. Кроме того, выполнение карманов может быть осуществлено как на валу, так и на втулке. Реверсирование оре)итального. движения может осуществляться подачей рабочей жидкости в камеру 5 и сливом из камеры 4, как указано пунктирными стрелками (фиг. 1).
Предлагаемое устройство в связи с повышением надежности рс1боты путем обеспечения орбитального движения вала позволяет избегать в следящих золотниках заклинивания и вести проектирование, ориентируясь только на жидкостное трение, т.е. снизить усй:7лие прижима копировального шупа к копиру, уменьшить его износ и повысить точность копирования. Кроме того, применение предлагаемого уст ройства в сервозолотнике, позволяет снизить мощность управпякицего сигнала и уменьшить его габариты, а также повысить точность его работ ты.
Формула изобретения
Гидростатическая опора, содержащая втулку, охватывающую цапфу вала с несущими карманами, торцовую камеру подвода рабочей жидкости и камеру слива, а также входной дроссель, расположенный между торцовой камерой подвода и несущими карманами, и выходной дроссель - между несущими карманг1ми и камерой слива, отличающаяся тем, что, с целью повышения надежности работы путем обеспечения орбитального движения вала и уменьшения габаритов , несущие карманы расположены по винтовой линии с угловой про гяженностью не менее 180, при
этом дроссели образованы рабочими поверхностями втулки и цапфы вала.
Источники информации, принятые во внимание при экспертизе
1. Акцептованная заявка Великобритании I 1327776, кл. F 2 А,
1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидростатическая опора | 1991 |
|
SU1784772A1 |
| Гидростатическая опора | 1990 |
|
SU1751501A1 |
| Радиально-упорная гидростатическая опора | 1989 |
|
SU1668763A1 |
| Гидростатодинамическая опора | 1980 |
|
SU969995A1 |
| Гидростатическая опора | 1983 |
|
SU1143900A1 |
| Гидростатическая опора | 1986 |
|
SU1350391A1 |
| Регулятор давления для замкнутой гидростатической опоры | 1979 |
|
SU1059555A1 |
| Гидростатическая опора | 1981 |
|
SU977857A2 |
| Радиально-упорный гидростатический подшипник | 1987 |
|
SU1479742A1 |
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2013 |
|
RU2537217C2 |
фигЛ
риг.1
ЙйлА
.3
IPM.tt
Фиг. 6
физЛ
