Изобретение относится к бесконтактным измерителям параметров движения объекта, использующим случайные флуктуации освещенности, отражаемые или излучаемые контролируемой поверхностью, и может найти применение в прокатном производстве, авиации, на транспорте и т.д. Известно бесконтактное корреляционное устройство для измерения пути и линейной скорости объекта 1 Однако это устройство сложно и результаты измерени;я, получаемые на его выходе, содержат погрешность квантования, обусловленную наличием дискретного элемента-счетчика числа, пропорционального пройденному пути, что уменьша ет точность измерения. Наиболее близким-к предложенному является устройство, содержащее пре образователи, усилители, перемножаю щие звенья, интеграторы, вычитающее звено и блок регулируемого запаздывания, выполненный на управляемом по частоте генераторе, вход которог подключен на выход вычитающего звен а выход подключен к распределителю импульсов с тремя шинами, одна из них электрически связана с ключам .пропуска сигналов первого преобразо ателя на запоминающую емкость, подключенную к эмиттерному повторителю, а вторая и третья шины связаны с ключами пропуска сигналов с выхода эмиттерного повторителя на входы перемножающих звеньев, выходы которых через ключи шин распределителя подключены на входы интеграторов 12. Однако с помощью этого устройства нельзя измерять отрицательные скорости, движения контролируемого объекта. Цель изобретения - расщирение функциональных возможностей устройства, использующего корреляционный метод измерения скорости движения контролируемого объекта. Поставленная цель достигается тем, что в известный корреляционный измеритель скорости перемещения объекта, содержащий два фотоэлектрических преобразователя, два усилителя, связанные с преобразователями, два блока перемножения, последовательно соединенные с интеграторами, блок сравнения, два входа которого соединены с выходами двух интеграторов, блок регулируемого запаздывания, две схемы И, блок индикации скорости, при этом выход первого усилителя
связан с первым входом .первого блока перемножения, введены блок индикации направления, схема ИЛИ, второй блок регулируемого запаздывания, две схем слежения связывающи.е выходы интеграторов с управляющими входами соответ СТВУ1ЭЩИХ блоков регулируемого запаздывания, а первый усилитель через второй блок регулируемого запаздывания связан с первым входом второго блока перемножения, а выход второго усилителя через первый блок регулируемого запаздывания со вторым входом первого блока перемножения и со вторым входом второго блока перемножения, входы первой схемы И связаны с информационным выходом первого блокарегулируемого запаздывания и первым выходом блока сравнения, а входы второй схемы И связаны с информационным выходом второго блока регулируемого запаздывания и со вторым выходом блока сравнения, выходы двух схем И через схему ИЛИ связаны с блоком- индикации скорости, и, кроме того, оба выхода блока сравнения связаны с блоком индикации направления. На чертеже представлена функциональная схема корреляционного измерителя скорости перемещения объекта
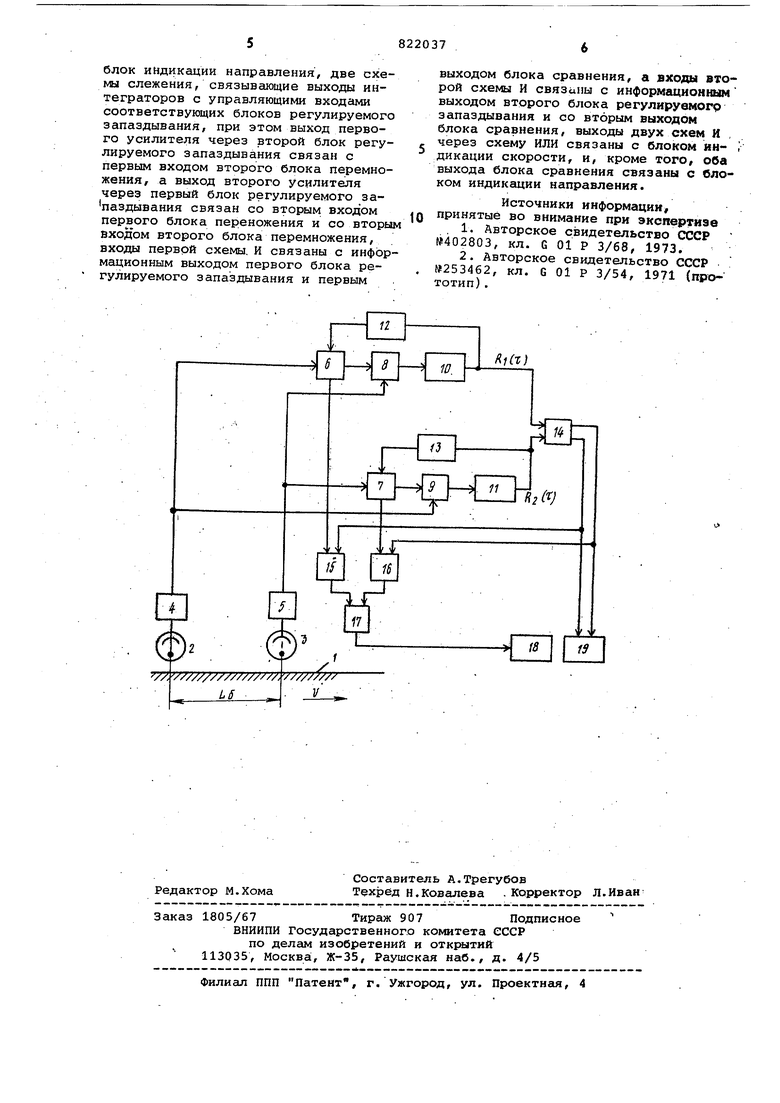
Предложенное устройство содержит два фотоэлектрических преобразователя 2 и 3, два усилителя 4 и 5, два блока 6 и 7 регулируемого запаздывания, два блока 8, 9 перемножения, два интегратора 10 и 11, две схемы слежения 12 и 13, блок 14. сравнения, две схемы И 15 и 16, схемы ИЛИ 17, блок 18 индикации скорости и блок 19 индикации направления движения объекта.
Устройство работает следующим образом.
При движении контролируемого объекта в направлении,, обозначенном на чертеже стрелкой, на выходе фотоприемника 2 существует электрический сигнал f(t), на выходе фотоприемника 3 существует сигнал Ht-t), если же объект движется в противоположную сторону, то на выходе фотоприемника 3 существует сигнал f(t), а на выходе фотоприемника 2 сигнал f(t-T). Величина временного запаздывания сигнала t определяется так:
L ,
где L - б.азовое расстояние между
фотоприемниками, V - линейная скорость движения
объекта.
При дв.ижении объекта в направлении, указанном на чертеже стрелкой, сигнал f(t) с выхода фотоприемника подается на вход блока б регулируемого запаздывания, где задерживаетс на время задержки . Сигнаш с фотоприемника 3 поступает на блок 8 перемножения, где формируется произведение задержанного сигнала от фотоприемника 2 и сигнала от фотоприемника 3. Произведение подается на интегратор 10, на выходе которого существует взаимно-корреляционная функция сигналов R (г) . Максимум этой.функции будет существовать при. зид- Схема слежения осуществляет слежение за максимумом К(й), поддерживаяСэо,д . На выходе, интегратора 11 тоже будет существовать взаимно-корреляционная функция R:, (&) однако максимальное значение R(5) значительно меньше максимума ). При движении .объекта в противоположную сторону, наоборот, максимальное значение R (€) значительно, меньше максимума Rg.(C) . Сигналы R (f) и 2.) подаются на блок 14 сравнения. Если R (t) ) ,- то сигнал появляется на первом выходе блока 14, открывая схему 15, если же R (Р) Ку(И то сигнал появляется на втором выходе блока 14, открывая схему 16. Таким образом, направление движения контролируемого объекта определяется по тому, на каком выходе блока 14 сравнения существует сигнал. Выходы блока 14 подключены к входам индикатора направления движения .объекта 19 Сигналы на выходе блока 14 сравнения управляют схемами И 15 и 16, так, что на выходе схемы ИЛИ 17 существует сигнал и , снимаемый с информационного выхода соответствующего блока регулируемого запаздывания. По величине временной задержки, при известной величине ь/ , определяют скорость движения объекта V , поэтому сигнал Т с выхода схемы ИЛИ 17 подается на блок индикации скорости. Предложенное устройство позволяет определять направление движения контролируемого объекта и измерение величины скорости движения при переме-: щении объекта как в прямом, так и в противоположном направлениях.
Формула изобретения
Корреляционный измеритель скорости, содержащий два фотоэлектрических преобразователя, два усилителя, связанные с преобразователями, два блока перемножения, последовательно соединенные с интеграторами, блок сравнения, два йхода ко Эрого соединены с выходами двух интеграторов, блок регулируемого.запаздывания, две схемы И, блок индикации скорости, при этом выход первого усилителя связан с первым входом первого блока перемножения ,отличающийся тем, что, с целью расширения функциоНсшьных возможностей за счет определения направления перемещения в него дополнительно введены схема ИЛИ, второй блок регулируемого запаздывания.
блок индикации направления, две схемы слежения, связывающие выходы интеграторов с управляющими входаади соответствующих блоков регулируемого запаздывания, при этом выход первого усилителя через второй блок регулируемого запаздывания связан с первым входом второго блока перемножения, а выход второго усилителя через первый блок регулируемого запаздывания связан со вторым входом
первого блока переножения и со вторым входом второго блока перемножения, входы первой схемы. И связаны с информационным выходом первого блока регулируемого запаздывания и первым
выходом блока сравнения, а входы второй схемы И связыпы с информационным выходом второго блока регулируемогр запаздывания и со вторым выходом блока сравнения, выходы двух схем И через схему ИЛИ связаны с блоком ин- , дикации скорости, и, кроме того, оба выхода блока сравнения связаны с блоком индикации направления.
Источники информации/ принятые во внимание при экспертизе
, 1. Авторское свидетельство СССР №402803, кл. G 01 Р 3/68, 1973.
2. Авторское свидетельство СССР W253462, кл. G 01 Р 3/54, 1971 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости движения объекта | 1980 |
|
SU888043A1 |
| Устройство для бесконтактногоизМЕРЕНия СКОРОСТи пЕРЕМЕщЕНияОб'ЕКТА | 1978 |
|
SU824055A1 |
| Фотоэлектрический измеритель скорости движения поверхности | 1980 |
|
SU905862A1 |
| Дальномер | 1986 |
|
SU1448198A1 |
| Устройство для измерения скорости движения транспортного средства | 1988 |
|
SU1727083A1 |
| КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ СКОРОСТИ ПЕРЕМЕЩЕНИЯОБЪЕКТА | 1969 |
|
SU253462A1 |
| Устройство для регулирования толщины полосы на прокатном стане | 1991 |
|
SU1794518A1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ВЗРЫВЧАТЫХ И НАРКОТИЧЕСКИХ ВЕЩЕСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2507505C1 |
| СПОСОБ МНОГОМЕРНОГО ТРАЕКТОРНОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2306581C1 |
| Устройство для определения траекторий движения наземного транспортного средства | 1978 |
|
SU877579A1 |
