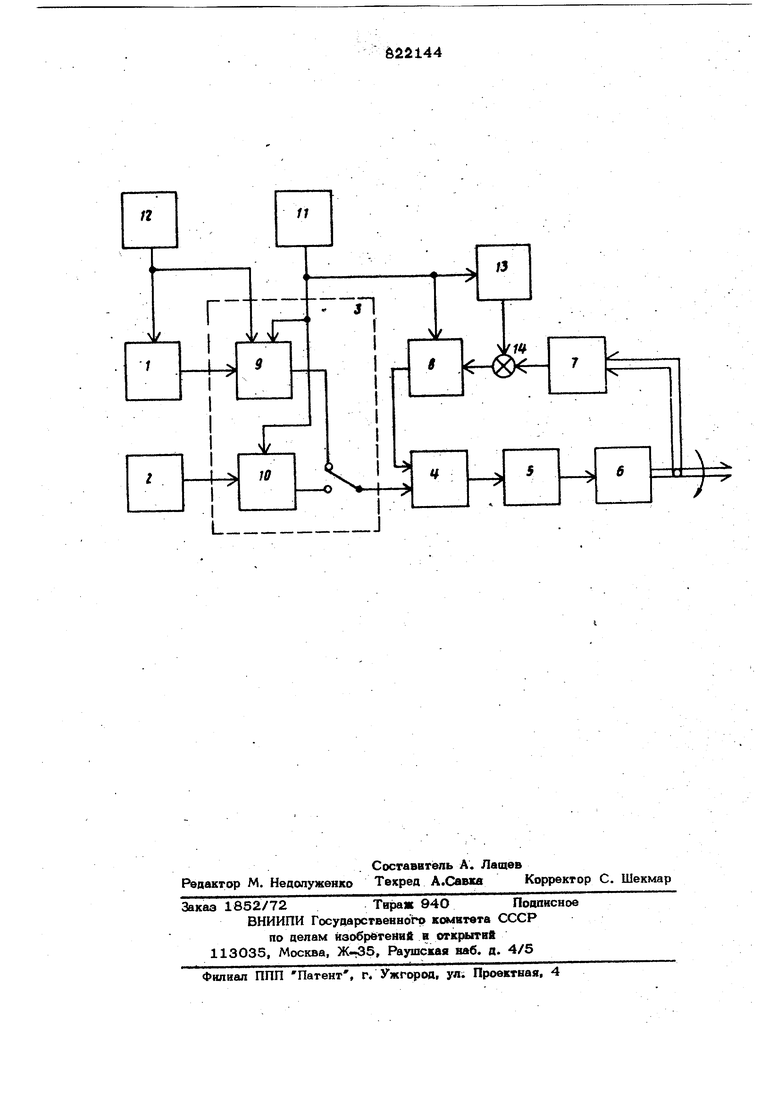
Изобретение относится к автоматнчес« кому управлению и вычислительной технике и может быть использовано в системах автоматического управления, содержащик интегрирующий привод. Наиболее близким техническим решением к предлагаемому является интегрирующий привод, содержащий задатчик сигнала постоянного напряжения, последовательно соединенные источник несущей частоты входного сигнала и датчик входного сигнала, последовательно соединенные источник несущей частоты привода, компенсирующее устройство и первый сум матор и последовательно соединенные вто рой сумматор, усилитель, двигатель и тахогенератор, выход которого соединен со вторым входом первого сумматора Т|. Недостаток известного привода - узкая полоса воспроизводимых частот входкого сигнала. Цельизобретения - расширение диапазона воспроизводимых частот входного сигнала привода. Для этого в него введены два преобразователя синусоидального напряжения в прямоугольное, входы первого из которых соединены соответственно- с выходом задатчика сигнала постоянного напряжения, с выходом и входом датчика входного сигнала; с выходом источника несущей частоты привода и первым входом второго сумматора, а вход компенсирующего устройства р выход первого сумматор а соединены соответственно с первым и вторым входами второго преобразователя синусоидального напряжения в прямоугольное, выход которого соединен со вторым входом второго сумматора. На чертеже схематически изображен предлагаемый интегрирующий привод. Интегрирующий привод содержит датчик входного сигнала 1, задатчик 2 сигнала постоянного напряжения, первый преобразователь 3 синусоидального напряжения в прямоугольное, второй сумматор 4, силитель 5, двигатель 6, тахогонератор 7, преобразователь 8 синусоидального
напряжения в прямоугольное, цемодулятор,моаулягор 9, мооулятор 10, причем блоки 9 и 10 входят в состав преобразователя 3, источник 11 несущей частоты привода, источник 1.2 несу1цей частоты вхоаного сигнала, компенсирующее устройство 13, первый сумматор 14. .
Интегрирующий привод paeotudY следующим образом.
Входной сигнал с датчика 1, запитываемого от источника 12 или эадатчика 2. поступает на преобразователь 3, на который поступают два опорных напряже нйя от источников 11 и 12 несущей частоты. В случае работы привода от сигнала переменного тока используется демодулятор-модулятор 9 преобразователя 3, а в случае работы от сигнала постоянно го тока используется модулятор 10 преобразователя 3. С выхода преобразователя .3 напряжение поступает на первый вход сумматора 4, на второй вход которого поступает напряжение с преобразователя 8, один вход которого соединен с источником несущей частоты 11. ОстаТочное напряжение на выходе тахогенера- тора 7 компенсируется с помощью компенсирующего устройства IS.
Таким образом,. в предлагаемом интегрирующем приводе введение преобрёзователей 3 и 8 в цепь задающего сигнала и в цепь тахогенератора 7 не ухудшает точности работы интегрирующего привода так как идентичные элементы установлены на вход и в цепь обратной связи замкнутой системы автоматического регулирования.
Предлагаемый привод позволяет расширить диапазон частот входного сигнала пр неизменной несущей частоте привода. Этот диапазон охватывает частоты от нуля до - - граничной частоты работы преобра- .аователей. Kp(ie того, выходное напряжение преобразователей пропорционально синфазной составляющей, поэтому отпадает самая трудоемкая операция при регулировании - фазирование входных сигналов интегрирующего привода. При компенсации остаточного напряжения тахогенератора 7 достаточно теперь только масш-
табного компенсирующего устройства 13, Отсутствие квадратурной составляющей облегчает построение входной части интегрирующего привода, позволяет увеличить ее коэффицие1{т усиления и умены шить, таким образом, приведенный ко входу дрейф нуля деМодулятора- 4одулятора, находящ,егося в усилителе 5. При низ ких требуемых точностях интегрирующего
привода возможно упростить структуру усилителя 5 интегрирующего привода, вообще исключив | из него тракт демодулятор-модулятор.
5формула изобретения
Интегрирующий привод, содержащий задатчик сигнала постоянного напряжения, последовательно соединенные источник несущей частоты входного сигнала и датчик входного сигнала, последовательно соединенные источник несущей часто- . ты привода, компенсирующее устройство и первый сумматор и последовательно соединенные второй сумматор, усилитель, двигатель и тахогенератор, выход которого соединен со вторым входом первого сумматора, о т л и ч а ю щи и с я тем, что, с целью расширения диапазона воспроизводимых частот 1 ходного сигнала привода, в него введены пва пре-ч образователя синусоидального напряжения в прямоугольное, входы первого из которых соединены соответственно с выходом задатчика сигнала постоянного напряже-
5 ния, с выходом и входом датчика входного сигнала, с выходом источника несу-ч щей частоты привода и первьп с входом второго сумматора, а вход компенсирующего устройства и выход первого с.уммаЙтора соединены соответственно с первым и вторым входами второго преобразователя синусоидального напряжения в прямоугольное., выход которого соединен со вторым входом второго сумматора.
5Источники информации,
принятые во внимание при экспертизе
.1. Фабрикант Б. А. и др. Интегрирующий привод переменного тока. M.W1., Энергия, 1966, с. 10 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрирующий привод переменного тока | 1987 |
|
SU1481709A1 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1239683A2 |
| Стабилизированный преобразователь переменного напряжения в переменное для нелинейной нагрузки | 1989 |
|
SU1621130A1 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1167579A2 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ НА НЕСУЩЕЙ ЧАСТОТЕ | 2009 |
|
RU2396511C1 |
| Способ управления вентильным двигателем и следящая система для его осуществления | 2017 |
|
RU2649306C1 |
| Интегрирующий привод переменного тока | 1985 |
|
SU1272306A1 |
| Преобразователь напряжения | 1990 |
|
SU1814177A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2651812C2 |
| УСТРОЙСТВО ДЛЯ ПОТЕНЦИАЛЬНОГО РАЗДЕЛЕНИЯ ЦЕПЕЙ ПОСТОЯННОГО ТОКА | 2011 |
|
RU2469392C1 |