Изобретение относится к вычислительной технике и к робототехнике и может быть использовано при управлении роботами-манипуляторами
Цель изобретения - повышение чувствительности привода к сигналу задания .
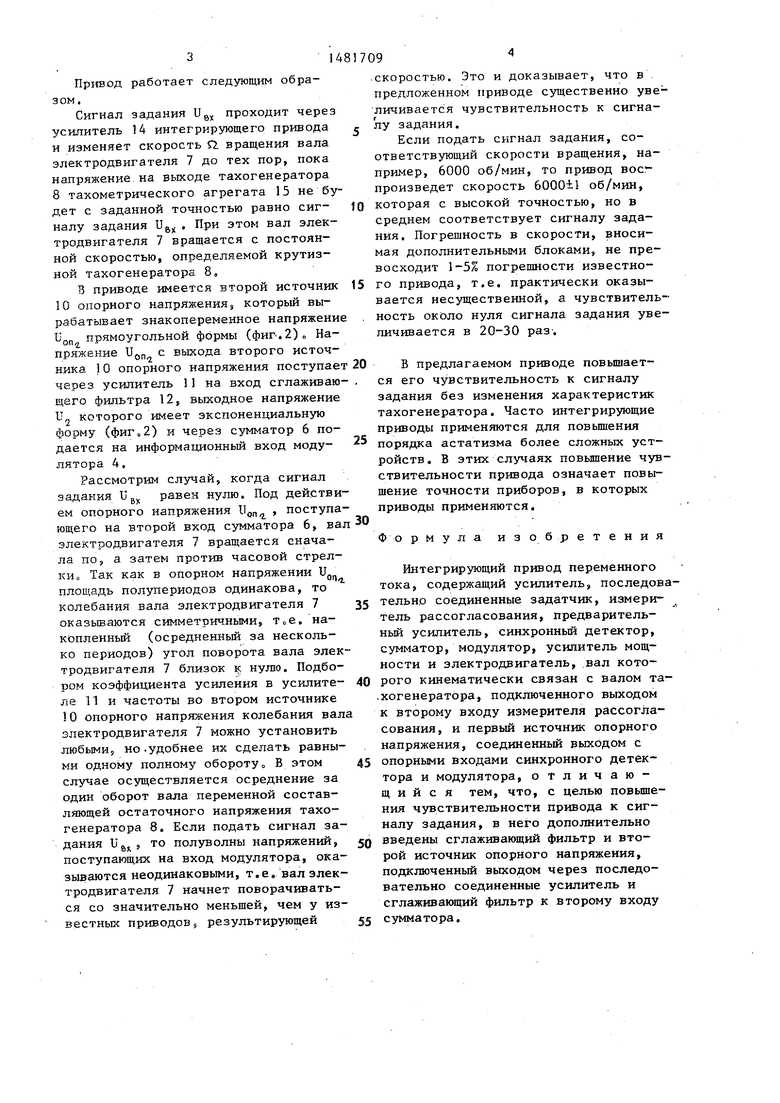
На фиг.1 показана функциональная схема привода; на фиг.2 - эпюры напряжений, поясняющие работу привода.
Привод содержит измеритель 1 рассогласования, предварительный усилитель 2, синхронный детектор 3, модулятор 4, усилитель 5 мощности, сумматор 6, электродвигатель 7, тахоге- нератор 8, первый 9 и второй JO источники опорного напряжения, усилитель 11, сглаживающий фильтр J2, за- датчик 13, усилитель 14 интегрирующего привода, тахометрический агрегат 15.
На фиг. и 2 приняты обозначения: UB)t - сигнал задания; Uori) - первое опорное напряжение; Uon - второе опорное напряжение, U2 - выходное напряжение спаживающего фильтра.
СО
3
Привод работает следующим образом.
Сигнал задания Uex проходит через усилитель 14 интегрирующего привода и изменяет скорость О. вращения вала электродвигателя 7 до тех пор, пока напряжение на выходе тахогенератора 8 тахометрического агрегата 15 не будет с заданной точностью равно сигU
&х
При этом вал элекналу задания
тродвигателя 7 вращается с постоянной скоростью, определяемой крутизной тахогенератора 8,
Т приводе имеется второй источник 10 опорного напряжения8 который вырабатывает знакопеременное напряжение
Uon прямоугольной формы (фиг .2)„ Напряжение Uon с выхода второго источника 10 опорного напряжения поступает 20 через усилитель 1 на вход сглаживаю- . щего фильтра 12S выходное напряжение U. которого имеет экспоненциальную форму (фиг о 2) и через сумматор 6 подается на информационный вход модулятора 4,
Рассмотрим случай, когда сигнал задания Ъ Б)( равен нулю. Под действием опорного напряжения Uon , поступа14817094
скоростью. Это и доказывает, что в предложенном приводе существенно увеличивается чувствительность к сигнас лу задания.
Если подать сигнал задания, соответствующий скорости вращения, например, 6000 об/мин, то привод воспроизведет скорость 600041 об/мин,
to которая с высокой точностью, но в среднем соответствует сигналу задания. Погрешность в скорости, вносимая дополнительными блоками, не превосходит 1-5% погрешности известно15 го привода, т.е. практически оказывается несущественной, а чувствительность около нуля сигнала задания увеличивается в 20-30 раз.
25
ющего на второй вход сумматора 6, вал электродвигателя 7 вращается сначала поs а затем против часовой стрелки Так как в опорном напряжении Uon площадь полупериодов одинакова, то колебания вала электродвигателя 7 оказываются симметричными, т„е. накопленный (осредненный за несколько периодов) угол поворота вала электродвигателя 7 близок к нулю. Подбо30
35
В предлагаемом приводе повышается его чувствительность к сигналу задания без изменения характеристик тахогенератора. Часто интегрирующие приводы применяются для повышения порядка астатизма более сложных устройств. В этих случаях повышение чувствительности привода означает повышение точности приборов, в которых приводы применяются.
Формула изобретения
Интегрирующий привод переменного тока, содержащий усилитель, последовательно соединенные задатчик, измеритель рассогласования, предварительный усилитель, синхронный детектор, сумматор, модулятор, усилитель мощности и электродвигатель, вал кото
В предлагаемом приводе повышается его чувствительность к сигналу задания без изменения характеристик тахогенератора. Часто интегрирующие приводы применяются для повышения порядка астатизма более сложных устройств. В этих случаях повышение чувствительности привода означает повышение точности приборов, в которых приводы применяются.
Формула изобретения
Интегрирующий привод переменного тока, содержащий усилитель, последовательно соединенные задатчик, измеритель рассогласования, предварительный усилитель, синхронный детектор, сумматор, модулятор, усилитель мощности и электродвигатель, вал кото
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1981 |
|
SU962844A1 |
| Следящая система | 1983 |
|
SU1120280A1 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1239683A2 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| Интегрирующий привод | 1976 |
|
SU822144A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2397498C1 |
| Следящая система | 1976 |
|
SU660018A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2011 |
|
RU2478211C1 |
| Следящая система | 1979 |
|
SU788076A1 |

Изобретение относится к вычислительной технике и к робототехнике и может быть использовано при управлении роботами-манипуляторами. Целью изобретения является повышение чувствительности привода к сигналу задания. Поставленная цель достигается за счет того, что в привод, содержащий последовательно соединенные задатчик, измеритель рассогласования, предварительный усилитель, синхронный детектор, сумматор, модулятор, усилитель мощности, электродвигатель и тахогенератор, соединенный выходом с вторым входом измерителя рассогласования, на второй вход сумматора подают симметричное знакопеременное опорное напряжение через усилитель и сглаживающий фильтр. Частота и амплитуда этого напряжения подобраны так, чтобы вал привода при отсутствии сигнала задания совершал один полный оборот сначала по, а затем против часовой стрелки. В результате среднее значение скорости остается равным нулю, а чувствительность привода к сигналу задания увеличивается в 20 раз. 2 ил.
ром коэффициента усиления в усилите- 40 рого кинематически связан с валом тале 11 и частоты во втором источнике О опорного напряжения колебания вал электродвигателя 7 можно установить любыми, но.удобнее их сделать равными одному полному обороту о В этом случае осуществляется осреднение за один оборот вала переменной составляющей остаточного напряжения тахогенератора 8. Если подать сигнал задания Uftlk5 то полуволны напряжений, поступающих на вход модулятора, оказываются неодинаковыми, т.е. вал электродвигателя 7 начнет поворачиваться со значительно меньшей, чем у известных приводов, результирующей
.хогенератора, подключенного выходом к второму входу измерителя рассогласования, и первый источник опорного напряжения, соединенный выходом с опорными входами синхронного детектора и модулятора, отличающийся тем, что, с целью повышения чувствительности привода к сигналу задания, в него дополнительно введены сглаживающий фильтр и второй источник опорного напряжения, подключенный выходом через последовательно соединенные усилитель и сглаживающий фильтр к второму входу сумматора.
Щ
Ua,
г
7l/anf
1
I
МлННК )
Фиг.1
tit
Фие.2
| Устройство для управления скоростью следящего привода | 1975 |
|
SU657407A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ измерения переменной составляющей остаточного напряжения асинхронного тахогенератора | 1985 |
|
SU1250999A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Фабрикант Е.А | |||
| и др | |||
| Интегрирующий привод | |||
| Л.: Энергия, 1980, с.29. | |||
