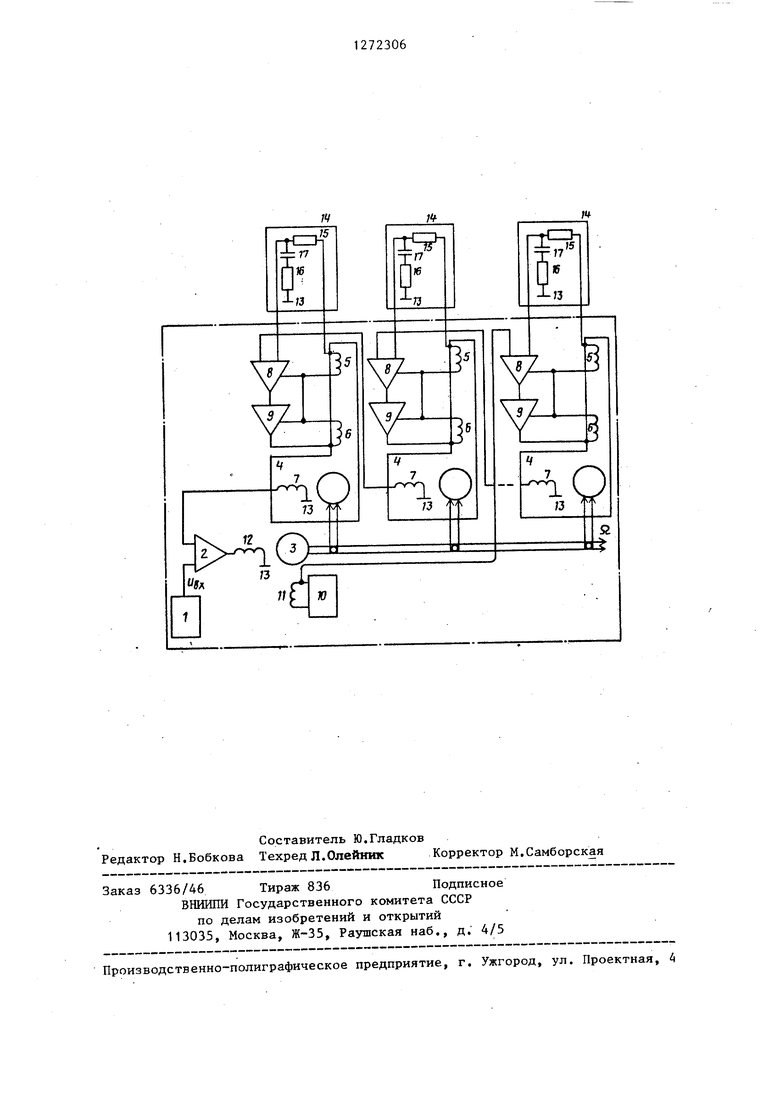
Изобретение относится к вычислигельной технике и может быть исноль зовано в качестве прецезионного интегратора и степенного преобразователя . Цель изобретения - повьшение точ ности привода. На чертеже приведена принципиал ная схема привода. Привод содержит источник 1 входного сигнала, усилитель 2 привода, электродвигатель 3, тахогенераторы 4, первые 5 и вторые 6 обмотки возбуждения, тахогенераторов 4, генераторные обмотки 7 тахогенераторов 4, сумматоры 8, усилители 9, источник 10 питанияj обмотку 11 возбужде ния и обмотку 12 управления электро двигателя 3j общую шину 13 привода, фазирующие устройства 14, резисторы 15 и 16J конденсаторы 17, Обозначен также входной сигнал Ugj, и скорость вращения вала электродвигателя 39 , В простейшем случае каждое фазирующее устройство 14 может быть выполнено в виде интегродифференцирующей КС-цепи5 содержащей резисторы 15 и 16, конденсатор 17 и общую шину 13 привода. Привод работает следующим образом. Входной сигнал Ug с выхода источ ника 1 входного сигнала, пройдя через усилитель 2 привода, поступает на обмотку 12 управления электродви гателя 3, скорость вращения вала которого изменяется до тех пор, пока сигнал с генераторной обмотки 7 пос леднего тахогенератора 4 не станет равным .входному сигналу U . Сигнал на выходе каждого и-го техогенерато ра 4 при постоянном и максимальном напряжении возбуждения равен и. UgK.SZ ,. (1) где К. - коэффициент передачи 1-го тахогенератора 4, и„ - напряжение возбуждения; SZ - скорость вала электродвигателя 3 j К. - коэффициент передачи между выходным сигналом U -го тахогенератора 4 и скорост Э вращения вала электродвигателя 3, В связи с тем, что в приводе все тахогенераторы 4, кроме первого, ра ботают при изменяющемся напряжении 061 возбуждения, то выражение (1) можно записать в виде и, и.. К..9. (2) Тогда для каждого i -го тахогенератора 4 выходной,сигнал U- равняетсяи, U,K,S7 и,,, и, Ug, UgK, .-1)K..к,-.,, 1,. , . , h- ЧИСЛО тахогенераторов 4 в приводе, Если все тахогенераторы 4 одинаковы, то сигнал и на выходе последнего тахогенератора 4 равен и Поскольку в прецезионном приводе обеспечивается равенство бх и,, то, следовательно, на основе равенства (4) и (5) для предлагаемого привода получают ex : Откуда я 1(к)--и и; Поскольку в прецезионных приводах и&х 9 ®0;(Ug , где 0 - измеряемый (обрабатываемьй) параметр, например угол поворота, перемещение, давление, то в результате из равенства (7) получают (К е / кГк-,(8) Кроме того, в каждом тахогенераторе 4 привода с помощью фазирующих устройств 14 изменяют фазовый сдвиг сигнала, снимаемого с первой обмотки 5 возбуждения каждого тахогенератора 4, относительно сигнала на первом входе соответствующего сумматора 8, и следовательно изменяют фазовьй сдвиг магнитного потока каждого тахогенератора 4 таким образом, что выходной сигнал его генераторной обмотки 7 имеет близкий к нулю фазовый сдвиг относительно сигнала на первом входе соответствуклцего сумматора 8, Вьшолнение фазирующих устройств 14 в виде RC-цепи имеет целый ряд практических преимуществ: вид применяемых в данном случае RC-цепей и их функции аналогичны виду и функ3
циям традиционного для линейных приводов фазового компенсирующего устройства, устанавливаемого обычно на входе привода, что удобно при настройке привода, указанная КС-цепь должна быть высокоомной, чтобы не нагружать первую обмотку 5 возбуждения тахогенератора 3. Это позволит применять в приводе высокоточные конденсаторы 17 малой емкости, В результате этого сигнал, поступающий на второй вход усилителя 2 привода, мало отличается по фазовому сдвигу от напряжения источника 10 питания. Это позволяет добиться в приводе уменьшения фазовых погрешностей, сопоставляемых по уровню с фазовыми погрешностями известного более простыми средствами, т.е. повышения точности привода.
Кроме того, реализация минимальных фазовых сдвигов выходных сигналов тахогенераторов 4 позволяет легко и с высокой точностью регулировать коэффициенты передачи тахогенераторов 4. Эта регулировка осуществляется путем изменения соотношения сопротивлений резисторов, установленных на первом и втором входах сумматоров 8, реализованных на операционных усилителях.
Таким образом, каждый тахогенератор 4 с соответствующими ему сумматором 8, усилителем 9 и фазирующим устройством 14 становится отдельной автономной ступенью интегрирующего привода. Это позволяет корректировать функцию преобразования обратно связи привода путем введения между , тахогенераторами 4 любых прямых, обратных или перекрестных связей без какой-либо перенастройки параметров как отдельных блоков, так и привода в целом.
Кроме того, указанные отличительные особенности предлагаемого привода позволяют исключить из него блок преобразования и масштабные компенсирующие устройства, т.е. значительно упростить его относительно извест723064
него, сохранив его точностные характеристики.
Формула изобретения
5 Интегрирующий привод переменного тока, содержащий h тахогенераторов, h сумматоров, h усилителей, усилитель привода, соединенный первым входом с выходом источника входного сигнала,
О а выходом - с первым выводом обмотки управления электродвигателя, подключенной вторым выводом к общей щине привода, обмотка возбуждения электродвигателя подключена первым и вто5 рым выводами к первому и второму выводам источника питания, вал электродвигателя, кинематически связан с валами и тахогенераторов, первый вход первого сумматора соединен с
0 первым выводом источника питания, первые входы всех остальных сумматоров, кроме первого, соединены соответственно с первыми выводами генераторных обмоток предыдущего тахо5 генератора, первый вывод генераторной обмотки п-го тахогенератора подключен к второму входу усилителя привода, а вторые выводы генераторных обмоток всех тахогенераторов сое0 динены с общей шиной привода, первый и второй выходы каждого сумматора соединены соответственно с первым выводом первой обмотки возбуждения соответствующего тахогенератора и с
уходом соответствующего усилителя, подключенного первым и вторым выходами соответственно к первому и вто- . рому выводам второй обмотки возбуждения соответствующего тахогенерато-
0 ра, причем первый вывод первой обмотки возбуждения и второй вывод второй обмотки возбуждения каждого тахогенератора соединен между собой, о тличающийся тем,что, с
5 целью повышения точности привода, в нем дополнительно установлены h фазирующих устройств, вход и выход каждого из которых подключены соответственно к второму выводу первой об0 мотки возбуждения соответствующего тахогенератора и к второму входу соответствующего сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрирующий привод переменного тока | 1984 |
|
SU1239683A2 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1167579A2 |
| Способ настройки интегрирующего привода переменного тока с каскадно соединенными тахогенераторами | 1985 |
|
SU1453363A1 |
| Интегрирующий привод переменного тока | 1980 |
|
SU949631A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Электромеханический интегратор | 1978 |
|
SU918935A1 |
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| Фазовая следящая система | 1974 |
|
SU552587A1 |
| Измерительное устройство гидродинамического лага | 1980 |
|
SU901909A1 |
| Способ настройки интегрирующегопРиВОдА пЕРЕМЕННОгО TOKA | 1978 |
|
SU800972A1 |
Изобретение относится к области вычислительной техники и может быть использовано в качестве прецезионного интегратора или степенного преобразователя. В приводе решается задача компенсации влияния фазового сдвига между входным и выходным сигналами. Эта задача решается следующим образом. Входной сигнал поступает через усилитель привода на обмотку управления электродвигателя, вал которого начинает вращаться под действием этого сигнала и вращает валы h тахогенераторов. Обмотка возбуждения первого тахогенератора подключена к источнику питания. Обмотки воздуждения всех остапь-я ных тахогенераторов, кроме первого, подключены к генераторным обмоткам предыдущих тахогенераторов. Сигнал с генераторной обмотки последнего тахогенератора поступает на второй вход усилителя привода. В цепи питания обмотки возбуждения каждого тахогенератора установлено фазовое ком(Л .пенсирующее устройство, выполненное в виде интегродифференцирующей RCцепи. 1 ил.
| Интегрирующий привод переменного тока | 1980 |
|
SU949631A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1167579A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
