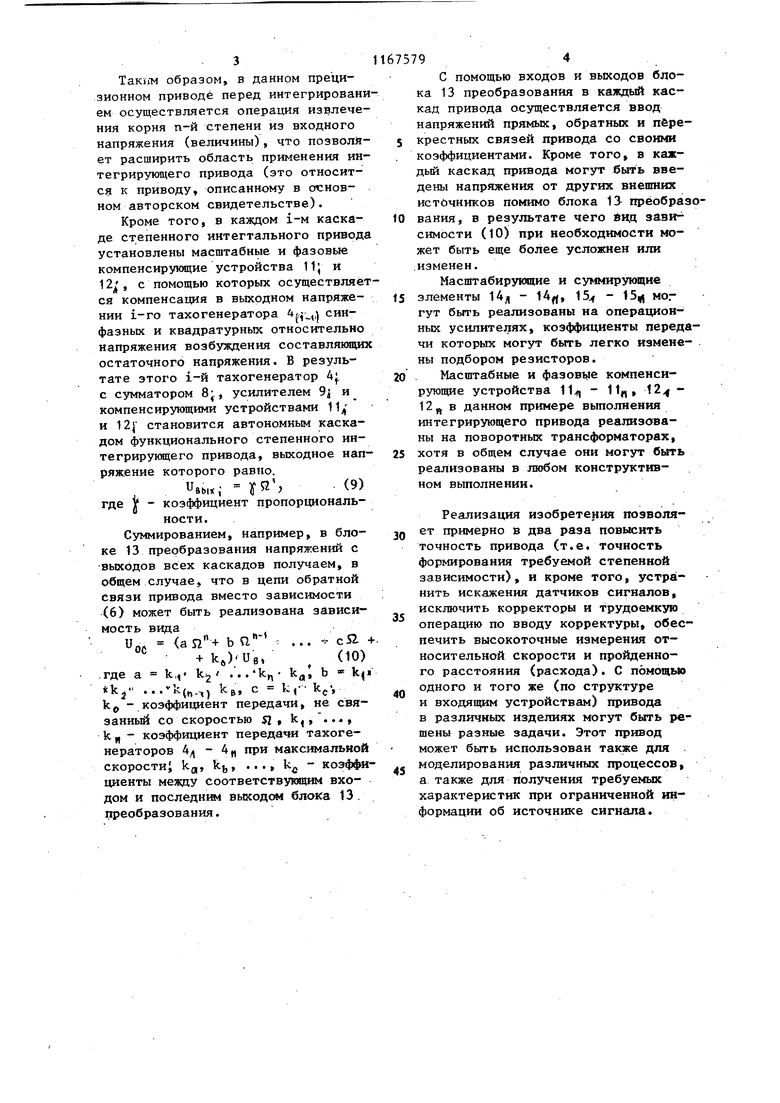
9 СЛ СО l Изобретение относится к нелиней ньы, степенньм преобразователям, имеющим характеристики типа Q « k Ч и „ , может найти широкое применение в моделирующих установках, расходомерах, счетчиках количества, измерителях скорости движе ния и пройденного расстояния, пост роенный на основе использования да чиков давления, и является усовершенствованием известного интегрирующего привода переменного тока по авт. св. № 949631. Целью изобретения яв.аяется повы шение точности привода, т.е. повышение точности воспроизведения с п мощью привода степенных функций при наличии искажений в. датчике давления. На фиг. 1 показана принципиальная схема предлагаемого привода, на фиг. 2 - принципиальная схема блока преобразования. Схемы содержат источник i входного напряжения, усилитель 2 приво да, двигатель 3 с обмоткой управле ния 3, и обмоткой возбуждения 3, тахогенераторы, 4, - 4, с первыми обмотками возбуждения 5 - 5, со вторыми обмотками возбуждения 6 6 и генераторными обмотками 7( 7 , сумматоры 8 - 8,, усилители 9 - 9„, источник питания 10, масш табные компенсирующие устройства 11{ - 11n, фазовые компенсирующие устройства 12 - 12,, блок 13 преобразования , масштабирующие элемен ты 14 - 14(,, суммирующие злементы 15 - 15j|, входное напряжение U , скорость вращения входного вала привода гг , Uguj - Ugj( - напряжение на входах блока 13 преобразования; Ueb()r, %1«(Л41)- напряжение на выхо дах блока 13 преобразования. Привод работает следующим образом. Входное напряжение Ugn привода с выхода источника 1 выходного напряжения, пройдя через усилитель 2 привода, поступает на обмотку уп равления 3 двигателя 3, скорость вращения которого изменяется до тех пор, пока напряжение с выхода генераторной обмотки 7ц последнего тахогенератора 4„ не становится равным входному напряжению, напряжение на выходе каждого i-ro тахогенератора 4 не становится 92 равным входному напряжению. Напряжение на входе каждого i-ro тахогенератора 4; при постоянном и максимальном напряжении возбуждения равно . UT; U0-k-T. RT. $2, (1) где k. - коэффициент передачи между выходным напряжением UT i-ro тахогенератора и скоростью вращения выходного вала привода Я. , kj. - коэффициент передачи i-ro тахогенератора 4 ; напряжение возбуждения. В связи с тем, что в интегрирующем приводе все тахогенераторы 4, кроме первого, работают, при изменяющемся напряжении возбуждения, запишем выражение (1) в виде i; - и(;-о г.у (2) где U-r , - выходное напряжение (д / . Ci-1)-ro тахогенератора 4(д-.,) . Тогда для каждого i-ro тахогенератора 4 выходное напряжение и, равно UT; Uj-kT, П Ug,-, т, U,k,,. kT,R - и ei (3) N «(, n UB- kT,- ..., где 1, ..., n - число тахогенераторов 4,,, Если все тахогенераторы 4,,- 4п одинаковы, т.е. kfj f Т напряжение на выходе последнего тахогенератора 4 равно (4) в прецизионном интегрирующем приводе обеспечивается равенство и,, и,.(5) На основе (4) и (5) в предлагаемом приводе получаем вх , (6) откуда « -Jcklf-Ue.Uj , (7) Поскольку в прецизионном интегрирующем приводе Ug, где 0 измеряемьй (отрабатываемый) параметр, например угол поворота перемещение, давление и т.п., а k - коэффициент передачи датчика, то в результате из выражения (7) получим д kUk 9вк ) k-;cvTkr;; ). (8). Таки-м образом, в данном прецизионном приводе перед интегрирован ем осуществляется операция извлече ния корня п-й степени из входного напряжения (величины), что позволй ет расширить область применения ин тегрирующего привода (это относится к приводу, описанному в от;новном авторском свидетельстве). Кроме того, в каждом i-м каскаде степенного интегтального привод установлены масштабные и фазовые компенсирукнцие устройства 11j и 12, с помощью которых осуществляе ся компенсация в выходном напряжении i-ro тахогенератора ..,,i синфазных и квадратурных относительно напряжения возбуждения составляющи остаточного напряжения. В результате этого i-й тахогенератор 4j с сумматором 8, усилителем 9 и компенсирующими устройствами и 12 становится автономным каскадом функционального степенного интегрирукицего привода, выходное нап ряжение которого равно. и,,„. уЯ, (9) где У - коэффициент пропорциональности. Суммированием, например, в блоке 13 преобразования напряжений с выходов всех каскадов получаем, в общем случае, что в цепи обратной связи привода вместо зависимости (6) может быть реализована зависимость вида и.. b : ... .- ся. + k,)Ue, (10) а b « k, .где а f., k / ...k Ч«-т) - коэффициент передачи, не связанный со скоростью 52 k,.., k „ - коэффициент передачи тахогенераторов Ад - 4 при максимальной скорости J kg, k,, ..., k - коэффи циенты меявду соответствунмцим входом и последним выходе блока 13, преобразования. 94 С помощью входов и выходов блока 13 преобразования в каждый каскад привода осуществляется ввод напряжений прямых, обратных и пёрекрестных связей привода со своими коэффициентами. Кроме того, в каждый каскад привода могут быть введены напряжения от других внепших истйчников помимо блока IS прёобразования, в результате чего йн,Ц зази симости (10) при необходимости может быть еще более усложнен или изменен. Масщтабиру«яцие и суммирующие элементы 14/( - 14, 15 - мог гут быть реализованы на операционных усилителях, коэффициенты передачи которых могут быть легко изменены подбором резисторов. Масштабные и фазовые компенсирующие устройства 1Ц - 11, 12 12 ц в данном примере выполнения интегрирующего привода реализованы на поворотных трансформаторах, хотя в общем случае они могут быть реализованы в любом конструктивном выполнении. Реализация изобретения поэволяет примерно в два раза повьюить точность привода (т.е. точность формирования требуемой степенной зависимости), и кроме того, устранить искажения датчиков сигналов, исключить корректоры и трудоемкую операцию по вводу корректуры, обеспечить высокоточные измерения относительной скорости и пройденного расстояния (расхода). С помощь одного и того же (по структуре и входящим устройствам) привода в различных изделиях могут быть решены разные задачи. Этот привод может быть использован также для . моделирования различных процессов, а также для получения требуемых характеристик при ограниченной информации об источнике сигнала.
UBtHX(l
(риг. 7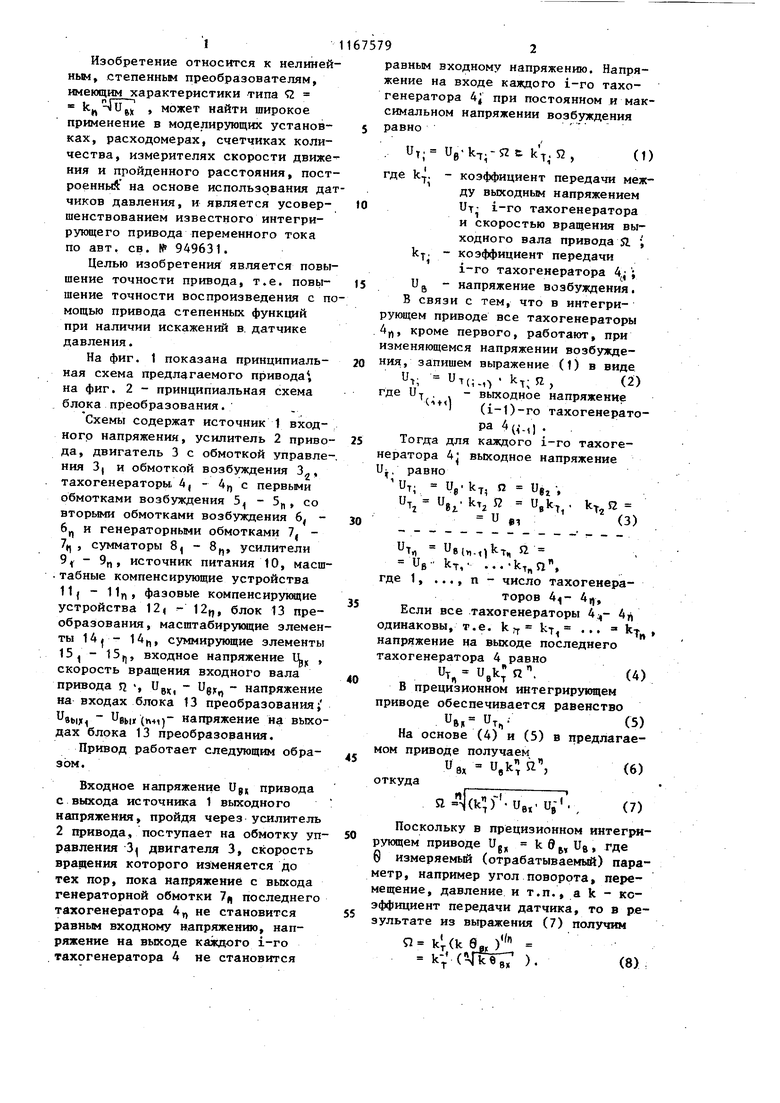
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрирующий привод переменного тока | 1985 |
|
SU1272306A1 |
| Интегрирующий привод переменного тока | 1980 |
|
SU949631A1 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1239683A2 |
| Способ настройки интегрирующего привода переменного тока с каскадно соединенными тахогенераторами | 1985 |
|
SU1453363A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| Двухканальная система регулирования скорости | 1980 |
|
SU900256A1 |
| Способ настройки интегрирующегопРиВОдА пЕРЕМЕННОгО TOKA | 1978 |
|
SU800972A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Устройство для контроля параметров синусно-косинусного вращающегося трансформатора | 1989 |
|
SU1720128A1 |
ИНТЕГРИРУЮЩИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА по авт. св. 1 949631, отличающийся тем, что с целью повышения точности привода в нем дополнительно установлены блок преобразования и масштабные и фазовые компенсирующие устр Лства по числу тахогенераторов привода, П1Шчем первый вывод второй обмотки воз- Г«.- - буждения -го тахогенератора соединен с первыми выводами первых обмо- ток -X масштабного и фазового компенсирукицих устройств вторые выводы которых подключены ко второму выводу второй обмотки возбуждения (-го тахогенератора первый вывод генераторной обмотки которого- соединен с общей шиной привода через последовательно соединенные вторые обмотки f -X масштабного и фазового компенсирующих устройств выходы тахогенераторов подключены к соответствупц1Я4 входам блока преобразования, выходы которого подключены к третым входам соответственно е всех сумматоров и усилителя приврда.
| Интегрирующий привод переменного тока | 1980 |
|
SU949631A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
