«
Изобретечне отиосптся к области нелинейных cTCneinthix преобразователей н может найти широкое npHMeire- ние в моделирующих установках, расходомерах, счетчиках, измерителях скорости движения и пройденного расстояния, построенных на основе использования датчиков давления, и является усовершенствованием известного интегрирующего привода пе- pe feннoгo тока по авт. св. № 949631 при числе тахогенераторов, равном двум.
Цель изобретения - расширение области устойчивости (интегрирующего привода с четным числом тахогенераторов обратной связи.
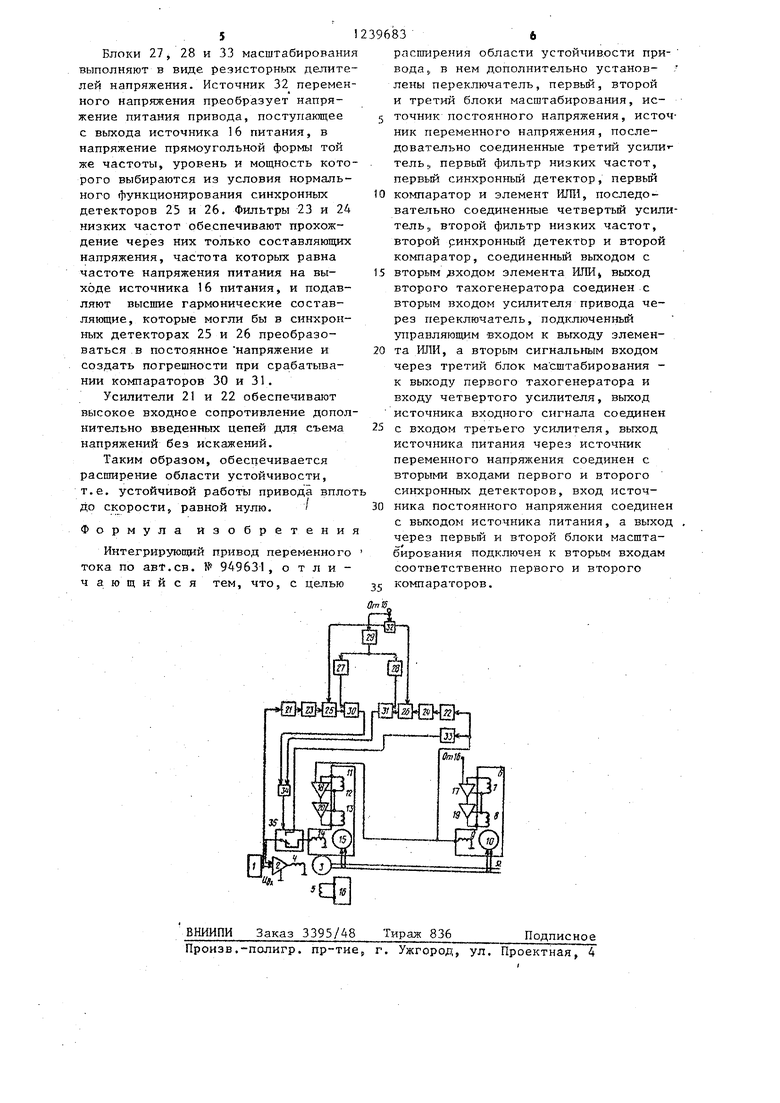
На чертеже представлена принципиальная схема привода.
Схема содержит источник 1 входного сигнала, усилитель 2 привода, двигатель 3 с обмотками управления А и возбутгсдения 5, первый тахогенера- тор 6 с первой 7 и второй 8 обмотками возбуждения, генераторной обмоткой 9 и ротором 10, второй тахогене- ратор 11 с первой 12 и второй 13 обмотками возбуждения, генераторной обмоткой 4 и ротором 15, источник 16 питания, первый 17 и второй 18 сумматоры, первьй 19, второй 20, третий 2 и четвертьй 22 усилители, первый 23 и второй 24 фильтры низких частот, первьй 25 и второй 26 син- .тсронные детекторы, первый 27 и второй 28 блоки масштабирования, источник- 29 постоянного напряжения, первый 30 и второй 31 компараторы, источник 32 переменного напряжения, тртий бгюк 33 масштабирования, элемент ИЛИ 34, перекл1очатель 35 (Ug, - входное напряжение привода, Q - скорости вращения выходного вала привода, U; - выходное напряжение i-ro блока
Привод работает следующим образом
Входные напряжения Ug, привода с выхода источника 1 входного сигнала поступает на вход третьего усилителя 21 , который функционально является развязывающим усилителем, и на первый вход усилителя 2 привода. С выхода последнего напряжение поступает на обмотку 4 управления двигателя 3, скорость вращения которого изменяется до тех пор пока напряжение Uj. с выхода второго тахогенерато ра 11 не станет равным входному напряжению Ug. Напряжение U на выхо
396ВЗ
дс первого тахогеиг.рпторп 6 при постоянном и максимальном напряже.нии возбуждения равно
и, и
,V К,7,
где и„-напряжение возбуждения;
К,--коэффициент передачи первого тахогенератора 6.
Выходное напряжение U тахогенератора 6 поступает ня электрический вход второго тахогенератора 11 в качестве, напряжения возбужения. Кроме того, напряжение U с выхода первого
тахогенератора 6 поступает на входы третьего блока 33 масштабирования и четвертого усилителя 22, который функционально является развязывающим усилителем. .
Учитывая, что в предлагаемом прис воде второй тахогенератор 1 1 работает при изменяюп1емся напряжении возбуждения, выходное напряжение IJ,, тахогенератора 11 имеет вид
UH и. .K,,.Q Up-Kg-K,,-rZ
(2)
где К, - коэффициент передачи второго тазогенерагора 11. Если первый 6 и второй 1 1 тахогенератор одинаковы, т.е. ,, K, то напряжение на выходе второго тахогенератора 11 имеет вид
., иягК - 2. . (3)
В прецезионном интегрирующем приводе обеспечивается равенство
ИХ
Uf,
40 И следовательно в нем получаем
вГ ft
к. ,
Откуда получаем выражение, связываю45 щее скорость вращения выходного вала
Я с входным напряжением U,
- Эх
(6)
50 Так как в прецезионных интегрирующих приводах , , где 9 - из- меряемьда (отрабатываемый) параметр, например, угол поворота, перемещение давление и т.п.; К,- коэффициент
55 передачи источника 1 входного сигнала, в результате из (6) получаем
Q. к (к
1.(7)
.
Таким обрялом, в известном приводе осуществляется операция извлечения квадратного корная () нэ входного напряжения (величины), что позволяет расширить его функциональные возможности.
Выходное напряжение третьего усилителя 21 через первый фильтр 23 низких частот поступает на первый вход первого синхронного детектора 25, на второй вход которого поступает напряжение с выхода источника 32 переменного напряжения. На выходе первого синхронного детектора 25 формируется постоянное напряжение величина и полярность которого меняется при изменении амплитуды и фазового сдвига входного напряжения и , Напряжение U.. с ВБТхода первого синхронного детектора 25 поступает на первый вход первого компаратора 30, на второй вход которого потупает напряжение Uj с выхода первго блока 27 масштабирования. На вых де первого компаратора 30 формируется напряжение Ujo , равное
О, если 1 I если
и,5 и,, ; 25 гг ;
(8)
т.е. первый компаратор 30 изменяет свое состояние, как только выходное напряжение 1), первого синхронного детектора 25 становится меньше (или изменяет полярность на обратную) выходного напряжения U2r первого блока 27 масштабирования, на вход которого поступает напряжение с выхода источника 29 постоянного напряжения.
Выходное напряясение четвертого усилителя 22 через второй фильтр 24 низких частот поступает на первый вход второго синхронного детектора 26, на второй вход которого поступает напряжение с выхода источника 32 переменного напряжения. На выходе второго синхронного детектора 24 формируется постоянное напряжение, величина и полярность которого меняется при изменении величины и знака скорости вращения вала привода. Напряжение U с выхода второго синхронного детектора 26 поступает на первый вход второго компаратора 31, на второй вход которого поступает напряжение с выхода второго блока 28 масштабирования. На выходе второго компаратора 31 формируется напряжение, равное
г |
и - 1
г/
()
I,
И,
; 7R
т.е. второй компаратор 31 изменяет свое СОСТОЯНИЙ, как только выходное напряжение Uj, второго синхронного детектора 26 становится меньше (или изменит полярность ил обратную) выходного напряжеггия U. второго блока
28 масштабирования, на вход которого поступает напряжение с выхода источника 29 постоянного напряжения. Последний предназначен для обеспечения требуемой точности срабатывания компараторов 30 и 31. Срабатывание второго компаратора 31 означает, что скорость вращения выходного вала Я привода стола меньше некоторого минимально допустимого значения или что
направление вращения вала привода меняется на обратное.
Выходное напряжение U (или 1Ц,) с выхода первого (или второго) компаратора 30 (или 31) поступает на
вход элемента ИЛИ 34, Выходное напряжение и, последнего поступает на управляющий вход переключателя 35, который отключает выход второго тахо- генератора 11 от второго входа усилителя 2 привода и подключает к
нему выход третьего блока 33 масштабирования ,
В результате такого переключения интегрирующий привод в области малых
скоростей и входных сигналов становится не степенным, а линейны, т.е. устойчивым, и точным при любом fpoB- не и фазовом сдвиге входного напряжения Ug и при любой скорости Ug
и любом направлении вращения выход- ного вала привода. С помощью третьего блока 33 масщтабирования устанавливается коэффициент передачи К привода в линейном режиме, т.е. с
одним тахогенератором 6, таким образом, чтобы
т;. ивы....;п °
где О - минимально допустимая ско- т
рость работы привода с
двумя тахогенераторами 6 и
м;
Ugyj -- напряжение обартной связи привода, соответствующее
АДИН
к2 - коэффициент привода с двумя тахогенераторами 6 и 11.
Блоки 27, 28 и 33 масштабирования выполняют в виде резисторных делителей напряжения. Источник 32 переменного напряжения преобразует напряжение питания привода, поступающее с выхода источника 16 питания, в напряжение прямоугольной формы той же частоты, уровень и мощность которого выбираются из условия нормального функдионирования синхронных детекторов 25 и 26. Фильтры 23 и 24 низких частот обеспечивают прохождение через них только составляющих напряжения, частота которых равна частоте напряжения питания на выходе источника 16 питания, и подавляют высшие гармонические составляющие, которые могли бы в синхронных детекторах 25 и 26 преобразоваться в постоянное напряжение и создать погрешности при срабатывании компараторов 30 и 31.
Усилители 21 и 22 обеспечивают высокое входное сопротивление дополнительно введенных цепей для съема напряжений без искажений.
Таким образом, обеспечивается расширение области устойчивости, т.е. устойчивой работы привода впло до скорости, равной нулю.
Формула изобретени
Интегрирующий привод переменного тока по авт.св. № 949631, о т л и - ч а.ющий ся тем, что, с целью
расгаирения области устойчивости привода в нем дополнительно установ- лены переключатель, первый, второй и третий блоки масштабирования, источник постоянного напряжения, источник переменного напряжения, последовательно соединенные третий усилит- тель,, первый фильтр низких частот, первый синхронный детектор, первый
компаратор и элемент ИЛИ, последовательно соединенные четвертый усилитель,, второй фильтр низких частот, второй ринхронный детектор и второй компаратор, соединен {ый выходом с
вторым входом элемента ИЛИ выход второго тахогенератора соединен с вторым входом усилителя привода через переключатель, подключенный управляющим входом к выходу злемента ИЛИ, а вторым сигнальным входом через третий блок масштабирования - к выходу первого тахогенератора и входу четвертого усилителя, выход источника входного сигнала соединен
с входом третьего усилителя, выход источника питания через источник переменного напряжения соединен с вторыми входами первого и второго синхронных, детекторов, вход источника постоянного напряжения соединен с выходом источника питания, а выход через первый и второй блоки масштабирования подключен к вторым входам соответственно первого и второго компараторов.
Ш
ВНИИПИ Заказ 3395/48 Тираж 836
Произв.-полигр. пр-тиер г. Ужгород, ул. Проектная, 4
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрирующий привод переменного тока | 1984 |
|
SU1167579A2 |
| Интегрирующий привод переменного тока | 1985 |
|
SU1272306A1 |
| Способ настройки интегрирующего привода переменного тока с каскадно соединенными тахогенераторами | 1985 |
|
SU1453363A1 |
| Процентный проективный компаратор | 1980 |
|
SU868599A1 |
| Бесконтактный регулируемый электропривод | 1986 |
|
SU1361697A1 |
| Бесконтактный реверсивный тахогенератор постоянного тока | 1982 |
|
SU1163431A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ТОПЛИВНО-РЕГУЛИРУЮЩЕЙ АППАРАТУРЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1991 |
|
RU2008642C1 |
| Способ измерения переменной составляющей остаточного напряжения асинхронного тахогенератора | 1985 |
|
SU1250999A1 |
| Интегрирующий привод переменного тока | 1980 |
|
SU949631A1 |
| РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU1711635C |
Изобретение относится к области нелинейных степенных преобразователей, может найти широкое применение в моделирующих установках, расходо- мерах, счетчиках количества, измерителях скорости движения и пройденного расстояния, построеиньк на основе использования датчиков давления. Целью изобретения является расширение области устойчивости интегрирующего привода с четным числом тахогенераторов обратной связи. Она достигается за счет переключения обратной связи привода. Привод содержит последовательно соединенные источник входного сигнала, усилитель и электродвигатель, на валу которого установлены два тахогенера- тора. Первый из тахогенераторов имеет независимое возбуждение и его выход соединен с обмоткой возбуждения второго тахогенератора. Кроме того, выходные сигналы обоих тахогенераторов подключены к информационным входам коммутатора, выходной сигнал коммутатора соединен с вторым входом усилителя. Поставленная цель достигается тем, что- в процессе работы привода сравниваются входной сигнал привода и выходной сигнал первого тахогенератора и в зависимости от результатов сравнения коммутатор подключает к второму входу усилителя либо выход первого интегратора, либо выход второго интегратора. I ил. § 0 го со со О5 00 со INJ
| Интегрирующий привод переменного тока | 1980 |
|
SU949631A1 |
