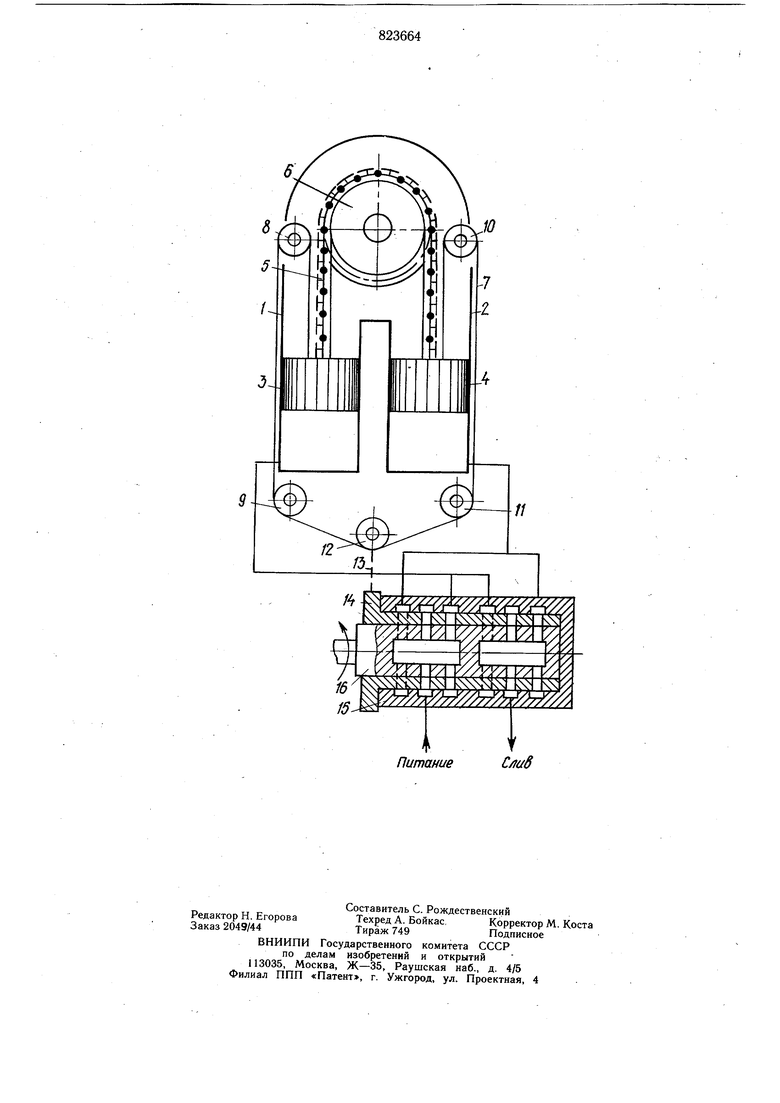
(54) ГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД не изображен) через устройство 15 поступает в гидроцилиндр 1. Поршень 3 движется вверх, а цепь 5, вращая звездочку 6, пере, дает усилие на выходной вал. Одновременно с этим звездочка 6 толкает правую ветвь цепи 5, которая передает движение поршню 4, осуществляя слив масла из тидроцилиндра 2. При этом ролик 8 препятствует изгибу ветви цепи, движущейся под действием поршня 3 вверх, а ролик 10 - изгибу ветви цепи, толкающей поршень 4. Предварительно натянутая стальная гибкая лента 7 служит направляющей для цепи одностороннего изгиба на прямолинейных ее участках от поршней до опорных роликов 8 и 10. Гибкая стальная лента повышает жесткость и продольную устойчивость цепи. Кроме того, при натяжении ленты предварительно выбираются все люфты в цепи, особенно на прямолинейных участках. Для устранения трения между цепью и гибкой стальной лентой на участке, где изгибается цепь одностороннего изгиба, меняя направление движения с прямолинейной на круговую траекторию, гибкая стальная лента огибает опорные ролики 8 и 10, установленные на диаметрально противоположных сторонах звездочки 6, и через натяжные ролики 9 и 11 замыкается на направляюшем ролике 12, Ролик 12 связан жесткой обратной связью 13 с внутренней втулкой 14 золотника 16. Этим осуществляется режим слежения привода. Управляющее устройство 15 может быть связано жесткой передачей 13 (в зависимоети от удобства управления) с любым из роликов 8-11 или 12. Вращение выходного вала в противоположном направлении осуществляется аналогично. Наличие гибкой стальной ленты, охватывающей опорные,.натяжные и направляющий ролики, обеспечивает возможность дистанционного расположения поворотного золотника управления относительно выходного вала исполнительного механизма. Устранение золотника и трубопровода из зоны расположения выходного вала позволяет использовать оба конца выходного вала и .повышает универсальность гидропривода. Применение предлагаемого изобретения в системах автоматического управления различных машин позволяет повысить их надежность и расширить диапазон их применения. Формула изобретения Гидравлический следящий привод, содержащий исполнительный механизм, выполненный Б виде двух спаренных гидроцилиндров, поршни которых свягзаны между собой цепной передачей одностороннего изгиба, опирающейся прямолинейными участнами со стороны, обратной изгибу на опорные ролики, и связанной жесткой обратной связью с гидравлическим управляющим устройством, отличающийся тем, что, с целью повышения надежности и расширения диапазона применения, цепная передача снабжена гибкой стальной лентой, связанной концами с поршнями гидроцилиндров и опирающейся на опорные ролики, и дополнительно установленными натяжнымп и направляющими роликами, при этом жесткая обратная связь выполнена в виде кинематического соединения одного из роликов с управляющим устройством. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2540894/25-06, кл. F 15 В 9/02, 09.11.77.
К
Питание
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический следящий привод | 1977 |
|
SU935650A1 |
| Манипулятор | 1979 |
|
SU831607A1 |
| Механизм вертикального перемещения грузоподъемника крана-штабелера | 1989 |
|
SU1677020A1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Рука промышленного робота | 1983 |
|
SU1174255A1 |
| ПРИВОД ВРАЩЕНИЯ СЦЕНИЧЕСКОЙ ПОВОРОТНОЙ ПЛОЩАДКИ | 2003 |
|
RU2261312C2 |
| Натяжное устройство скребкового конвейера проходческого комбайна | 1985 |
|
SU1281483A1 |
| Цепная передача | 1990 |
|
SU1776901A1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| Устройство для подачи длинномерного материала в зону обработки | 1983 |
|
SU1199376A1 |