(54) ГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД
1
Изобретение относится к машиностроению, предназначено для систем автоматического управления, а также может быть использовано в других отраслях народного хозяйства.
Известен гидравлический следящий привод, содержащий исполнительный механизм, выполненный в виде двух спаренных гидроцилиндров, порщни которых связаны между собой и с рабочим органом гибкими передачами, блок управления и блок питания 1.
Недостатками известного следящего привода являются развитие сравнительно небольших тяговых усилий (до 100 кгс), что определяемся прочностью гибкого штока, невысокая точность устройства при достаточно больших нагрузках, наличие уплотнений щтока, а это является сложной конструкторской и технологической задачей и сказывается на точности слежения из-за больщих сил трения, возникающих в уплотнительных узлах. Кроме того, тяговые усилия при возвратно-поступательном движении рабочего органа прикладываются только на стороне, где располагается тянущая
ветвь гибкого штока, что снижает жесткость и точность системы.
Цель изобретения - передача больших тяговых усилий, повышение надежности и долговечности привада.
Указанная цель достигается тем, что гибкие передачи, связывающие поршни между собой и с рабочим органом, выполнены в виде цепных штоков одностороннего изгиба, а в цилиндрах с внешней стороны цепного щтока установлены ролики.
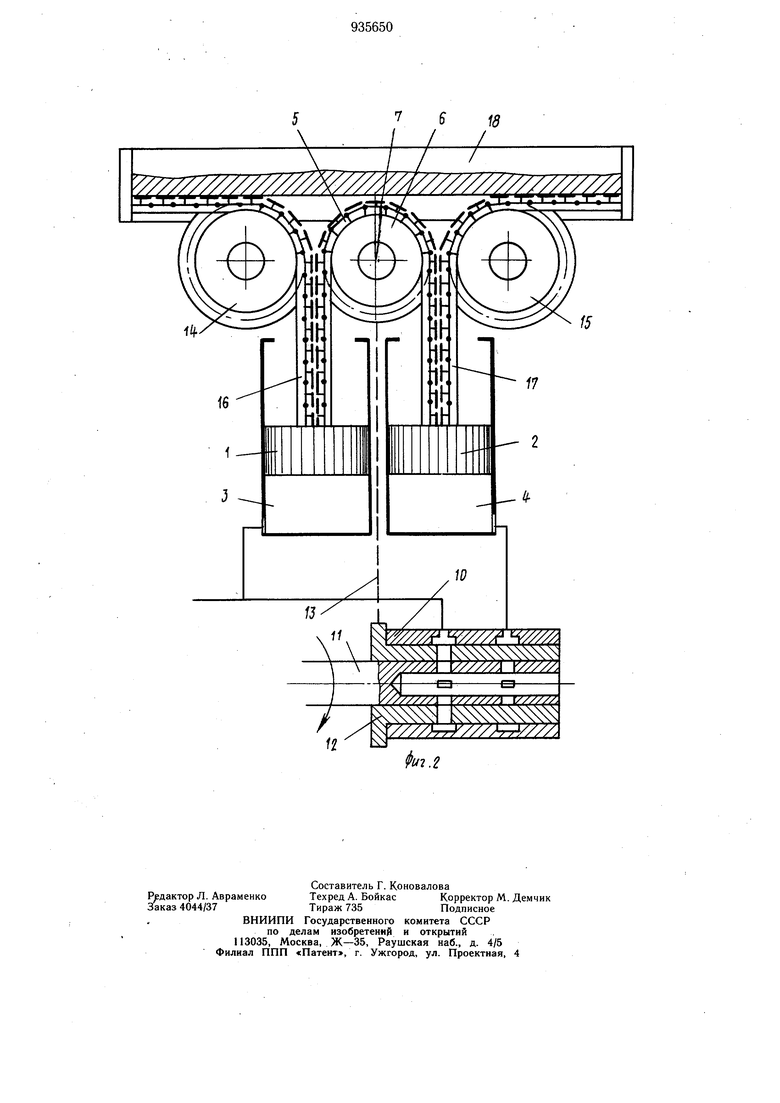
На фиг. 1 изображена принципиальная схема гидравлического цепного привода с опорными роликами; на фиг. 2 - то же, с двухсторонним управлением сливом.
Гидравлический цепной привод (фиг. 1) состоит из поршней 1 и 2, установленных в спаренных гидроцилиндрах 3 и 4 и связанных между собой цепью 5 одностороннего изгиба через звездочку 6, расположенную на валу 7. С диаметрально противоположных сторон звездочки 6, со сторон, обратных изгибу цепи 5, установлены ролики 8 и 9. Эти ролики обеспечивают правильное зацепление цепи 5 со звездочкой 6, двухстороннюю переда .чу и преобразование тягового усилия на цепи 5 в окружное усилие на звездочке. В качестве управляющего золотника применен поворотный золотник 10, состоящий из якоря 11 и втулки 12, связанной жесткой обратной связью 13 со звездочкой 6. Гидравлический цепной привод, изображенный на фиг. 2, оснащен дополнительными звездочками 14 и 15, сообщающими порщни 1 и 2 при помощи цепных щтоков 16 и 17 соответственно с исполнительным органом 18 поступательного движения. Гидравлический следящий привод работает следующим образом. При подаче задающего воздействия на втулку 12 поворотного золотника 10 рабочая жидкость поступает в гидроцилиндр 3. При этом порщень 1, поднимаясь вверх, толкает левую ветвь цепи 5, опирающуюся на левый ролик 8, и поворачивает звездочку 6, передавая крутящий момент на выходной вал 7. Правая ветвь цепи 5, опирающаяся на ролик 9, опускаясь вниз, толкает поршень 2 и вытесняет рабочую жидкость из гидроцилиндра 4. При реверсировании движения рабочая жидкость через поворотный золотник 10 поступает в гидроцилиндр 4. Порщень 2, поднимаясь вверх, с помощью правой ветви цепи 5 поворачивает звездочку 6 в противоположном направлении и опускает порщень 1 вниз. При этом поворачивается и втулка 12, связанная жесткой обратной связью 13 со звездочкой 6, осуществляя слежение за якорем 11 золотника 10. Гидравлический цепной привод, изображенный на фиг. 2, работает аналогично. При этом дополнительные звездочки 14 и 15 и щтоки 16 и 17 служат для передачи рабочего усилия к исполнительному органу 18. Применение цепи одностороннего изгиба позволяет упростить конструкцию исполнительного механизма за счет исключения дополнительного источника питания и подводящих трубопроводов для полости звездочки, не требуется уплотнение выходного вала. Наличие жесткой обратной связи между золотниками и исполнительным механизмом повышает точность работы привода. Возможность использования данного привода с исполнительным механизмом дифференциального типа делает его более универсальным. Формула изобретения 1.Гидравлический следящий привод, содержащий исполнительный механизм, выполненный в виде двух спаренных гидроцилиндров, порщни которых связань между собой и с рабочим органом гибкими передачами, блок управления и блок питания, отличающийся тем, что, с целью передачи больших тяговых усилий-, повышения надежности и долговечности, гибкие передачи, связывающие поршни между собой и с рабочим органом, выполнены в виде цепных щтоков одностороннего изгиба. 2.Привод по п. 1, отличающийся тем, что в цилиндрах с внешней стороны цепного штока установлены ролики. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 261079, кл. F 15 В 9/16, 1968. 77777// //////9y ////J(/A///////////////////, fo L V//f/
17
/
У//7///А //7//Л У////Л
{/Z-4 i a
//////, - fX/vv// T vy
)77
///.г-тУ///.
rxxx/;
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический следящий привод | 1978 |
|
SU823664A1 |
| ГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1970 |
|
SU261079A1 |
| Манипулятор | 1979 |
|
SU831607A1 |
| УГОЛЬНЫЙ СТРУГ | 1970 |
|
SU271464A1 |
| Рука промышленного робота | 1983 |
|
SU1174255A1 |
| ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1965 |
|
SU170308A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ЗЕЛ1ЛЕРОЙНОЙ МАШИНЫ | 1971 |
|
SU293974A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕПЛОВОЗОМ | 1970 |
|
SU269654A1 |
| Стенд для испытания взрывоимпульсныхиСпОлНиТЕльНыХ ОРгАНОВ гОРНыХ МАшиН | 1979 |
|
SU836352A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДААВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ | 1972 |
|
SU427885A1 |