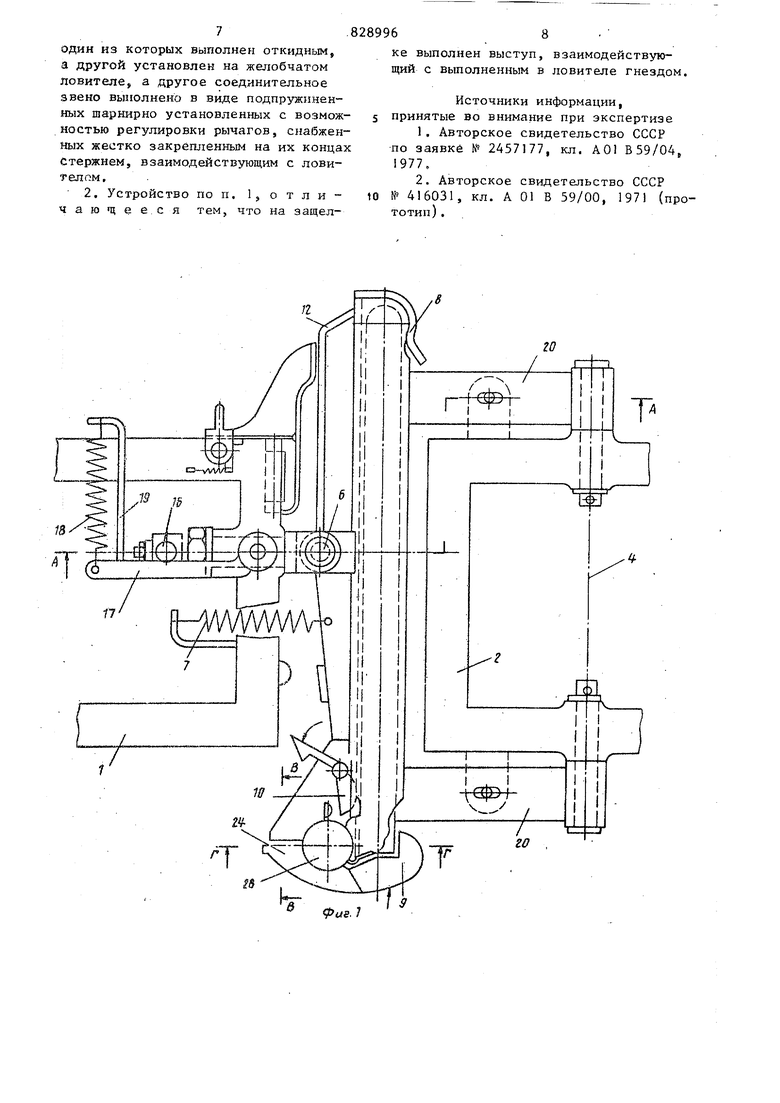
Изобретение относится к сельскохозяйственному машиностроению, а ча стности к соединительным устройства Известно устройство, включающее охватываемую и охватывающую формы и фиксатор I J. Наиболее близким техническим решением к предлагаемому является устройство для соединения сельскохозя йственных мащин пришеренговом расположении агрегата, включающее рамы сельскохозяйственных машин и соединительные звенья 2 . Недостатком этих устройств является большая трудоемкость составления агрегата, перевода его р транспортаое положение и наоборот. Цель изобретения - снижение трудоемкости составления агрегата, перевода его в транспортное положение и наоборот, повышение удобства и бе опасности эксплуатации. Цель достигается тем, что одно из соединительных звеньев выполнено в виде подпружиненного желобчатого ловителя, установленного посредством вертикального шарнира на раме одной из сельскохозяйственных машин асимметрично своей поперечной оси, при этом ловитель снабжен направляющим козырьком, жестко закрепленным на одном из его концов, спусковым крючком и подпружиненными защелкой и экраном, установленными ня другом конце ловителя, и упорами, взаимодействующими с упорами, расположенными на раме сельскохозяйственной машины, один из которых выполнен откидным, а другой установлен на желобчатом ловителе, а другое соединительное звено выполнено в виде подпружиненных шарнирно установленных с возможностью регулировки рычагов, снабженных жестко закрепленным на их концах стержнем, взаимодействующим с ловителем. 3 Причем на защелке выполнен высту ; взаимодействуюи. с выполненным в л вителе гнездом. На фиг. 1 изображено устройство для соединения сельскохозяйственных машин при шеренговом расположе -ши в агрегате, вид в плане; на фиг 2 то же, процесс соединения; на фиг. разрез А-А на фиг. 1; на фиг. 4 разрез Б-Б на фиг, 2; на фиг. 5 положення saniiejjKH ловите-ля спусков го крючка к стержня в момент рассоединения; на фиг. 6 разрез В-Б. на фиг. J (силовое замыкание защелки путем }ззаимодействия упора защелки с ответнььм .элементом ловителя); на фиг, 7 - сечение Г-Г на фиг, ; на фиг, 8 - разрез Д-Д на фиг. 5 (фикса ция защелки посредством взаимодействия выступа с гнездом ловителя); на ф.нг. 9 сечение Е-Е на фиг. 1 (силовоа загыкнргие защелки путем взаимодейстБия улора защелки с ответным элементом ло.) Устройство для соединения сельско хозяйственяых машин при шеренговом расположении в агрегате вк.шочает рамы 1 к 2 и соединительные звенья, од йо из которых с 1оризонтальной поперечной осью 3 установлено па торце рамы 1 одной машины и соединено с другим 3SCHOM с горизонтальной продольной ocbjc 4, установленным на тор де рамы 2 другой машины с возможностью взаимного перемещения звенье-.в, при этом соединительное звено с горизонтальной поперечной осью 3 выполнено в виде подпружиненного желоб л1атого ловителя 5j асимметрично закрепленного на одном конде горизонтгьгьной поперечной оси 3 посредством вертикального шарнира 6 с возможностью угтлового отклонения посредством пружины 7,, при этом передний конед лозителя 5 закрыт направляющим козьфьком 8j а заданий -- снабжен подпрлпкиненной защелкой ,9 спусковым крючком 10 и подпр ткиненным экраном 1 1 ,. Кроме того ловитель 5 снабжен упорами 12 и 13, взаимодействующими с упорами 14 и 15 соединительного звена с гор1гзонт 1льной поперечной осью.З, при этом передний упор 14 выполнен откидным. На другом конце горизонтальной поперечной оси 3 жестко закреплен рычаг 16, упирающийся в другой поворотный рычаг 17, поджать-ш. пру/киной 18 до элемента 19 рамы 6 Соединительное звено с горизонтальной продольной осью 4, установленное на торце рамы 2 другой машины выполнено в виде подпружиненных с возможной регулировкой рычагов 20, шарнирно закрепленных на этой оси 4, на кондах которых жестко закреплен стержень 21, расположенный параллельно продольной оси 4 и взаимодействующий с ловителем 5 подпружиненным экраном 11, спусковым крючком 10, взаимодействующим с подпружиненной защелкой 9. С далью фиксадии защелки 9 в открытом положении, не зависимо от спускового крючка 10, з.ащелка 9 снабжена выступом 22,- взаимодействующим с гнездом 23, выполненным в ловителе 5.Защелка 9 выполнена с возможностью осевого перемещения и подпружинена в осевом и тангендиальном направлениях и снабжена упором 24, который в закрытом положении защелки 9, взаимодействует с ответным элементом 25 ловитедя 5. Для удобства оперированием защелкой 9 она снабжена рукояткой 26. Для регулирования положения рычагов 20 относительно горизонтальной плоскости они снабжены прулшнами 27 и регулируемыми опорами 28. Устройство для соединения сельскохозяйственных машин при шеренговомрасположении в агрегате работает следующим образом. На ровной площадке ставится первая машина, у которой расфиксированы самоориентирующиеся опорные колеса, затем вторая машина подается передним ходом трактора по отношению к первой матине сзади и справа от нее, При этом допустимая неточность в расстоянии между машинами определяется зоной захвата ловителя 5, Большой размер этой зоны (Н 300 ммИ более) достигается за счет углового отклонения ловителя 5 в горизонтальной плоскости (фиг. 2), что облегчает возможность попасть в нее даже неопытному трактористу. Горизонтальная ориентадия ловителя 5 в момент соединения обеспечивается асимметричным его креплением на оси 3 и взаимодействием рычага 16 с поджатым до элемента 19 рамы 1 другим рычагом.17, при этом сила пружины 18 с запасом компенсирует перевес ловигеля 5 в сторону большего его веса. Горизонтальная ориентация ответного стержня 21 вместе с рычагами 20 обеспечивается за счет регулирования онор 28, ноддержиБающих пружи1ш 27. Отклонение смежных машин в момент их соединения во взаимном расположении по высоте (за счет неровностей площадки) компенсируется зоной захвата ловителя 5, обусловленной желоб чатым профилем его поперечного сечения, а также возможностью отклонения горизонтального стержня 21 за счет поворота рычагов 20 вокруг оси 4, при этом поворот .рычагов вверх осуществляется совершенно .свободно, а при повороте вниз сжимаются пружины 27. Таким образом при подаче второй машины с неточностью бокового рассто яния, не превышающего зону захвата ловителя 5, стержень 21 попадает в заднюю часть ловителя 5.и- скользя по ловителю 5 вперед, он отодвигает машину 1, стоящую слева, при этом ловитель 5, преодолевая действие пружи ны 7, стремится прижаться к стержню 21, поэтому стержень 2 передней своей частью скругленной скользит по внутренней полости ловителя 5 до упора в козырек В, одновременно стер жень 21 своей задней (цилиндрической частью скользит по торцу экрана ll прижимая его к скошенному торцу ловителя 5. Подпружиненный экран П предохраняет спусковой крючок 10 от преждевременного контакта со стержнем 21, И лишь после того, как стержень 2 полностью входит в полость ловителя 5, он нажимает на спусковой крючок 10 и тем самым освобождает подпружиненную защелку 9, которая поворачивается пружиной в положение показанное на фиг. 1, преграждает путьстержню21 назад и вправо от ловителя 5. Таким образом процесс со единения двух машин завершен. Если стержень 21 попадает в зону ловителя 5, расположенную впереди от шарни ра 6 поворота ловителя 5, то,в этом случае левая машина не отодвигается па нужное расстояние, а прилегание ловителя 5 к стержню 21 происходит за счет сопротивления перекатьшанию левой машины и ее разворота. В рабочем положении передний упо l4 рамы 1 должен быть зафиксирован, что обеспечивает устойчивость агре гата в работе при прямом переходе и на поворотах. В транспортном положении, когда сельскохозяйственны агрегат транспортируется в поперечном направлении, для обеспече шя лучшей его маневренности на дорогах и перекрестках передний упор 14 рамы 1 следует расфиксировать (фиг. 4, штрих-пунктирные линрш) . Для рассо.единения сельскохозяйственных машин защелку 9 поворачивают по часовой стрелке и фиксируют, как показано на фиг. 8. После этого подают вперед левую машину или назад правую машину и происходит свободное их рассоединение. Данная конструкция устройства для соединения сельскохозяйственных машин при шеренговом расположении в агрегате позволяет снизить трудоемкость составления агрегатов, перевода их в транспортное положение и наоборот, а также повысить удобство и безопасность составления агрегатов. Данное техническое решение позволяет одному трактористу осуществлять процесс сборки (составления) агрегата при шеренговом расположении сельскохозяйственных машин. Формула изобретения 1 . Устройство для соединения сельскохозяйственных машин при шеренговом расположении в агрегате, включающее рамы сельскохозяйственных машин и соединительные звенья, отличающееся тем, что, с целью снижения трудоемкости составления агрегата, перевода его в транспортное положение и наоборот, повышения удобства и безопасности эксплуатации, одно из соединительных звеньев выполнено в виде подпружиненного желобчатого ловителя, установленного посредством вертикального шарнира на раме одной из сельскохозяйственныхмашин асимметрично своей поперечной оси, при этом ловитель снабжен направляюEUiM козырьком, жестко закрепленным на одном из его концов, спусковым крючком и подпружиненными защелкой и экраном, установленными на другом конце ловителя, и упорами, взаимодействующими с -упорами, расположенными на раме сельскохозяйственной машины
один из которых выполнен откидным, а другой установлен на желобчатом ловителе, а другое соединительное звено выполнено в виде подпружиненных шарнирно установленных с возможностью регулировки рычагов, снабженных жестко закрештенным на их концах Стержнем, взаимодействующим с ловнтелпм,
2. Устройство по п. 1,отлич а ю 41, е е.с я тем, что на защелке выполнен выступ, взаимодействующий с выполненным в ловителе гнездом.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР по заявке № 2457177, кл. А01 659/04 1977.
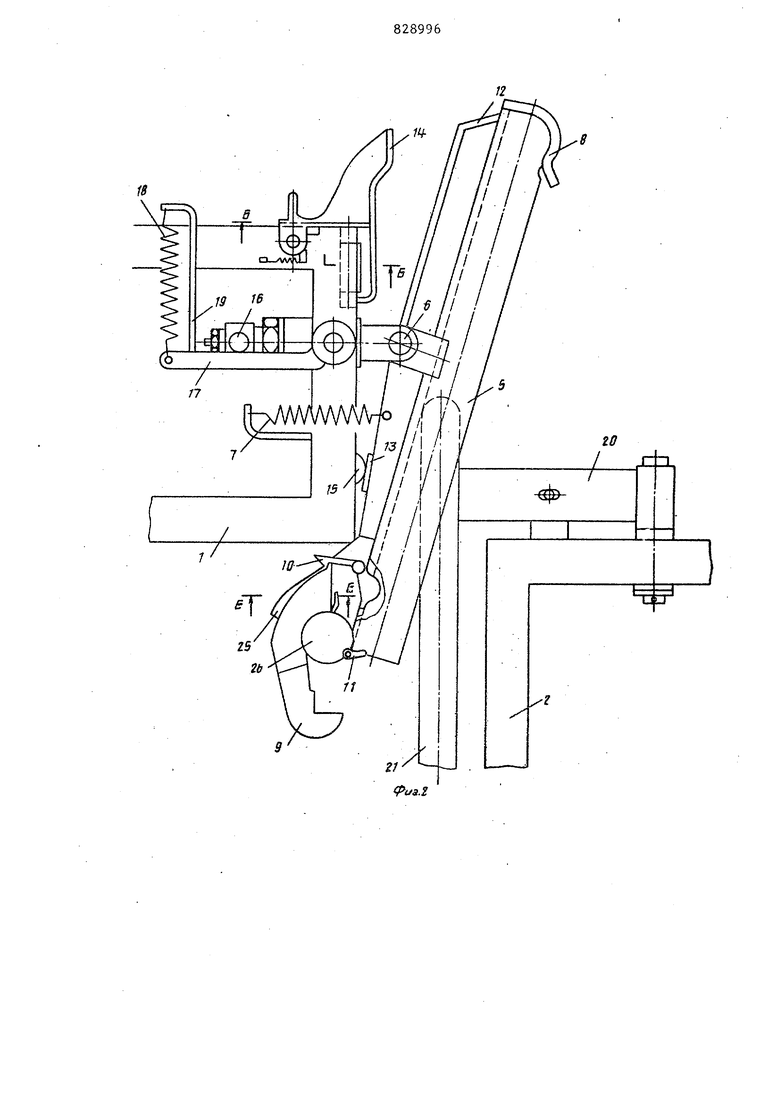
2.Авторское свидетельство СССР
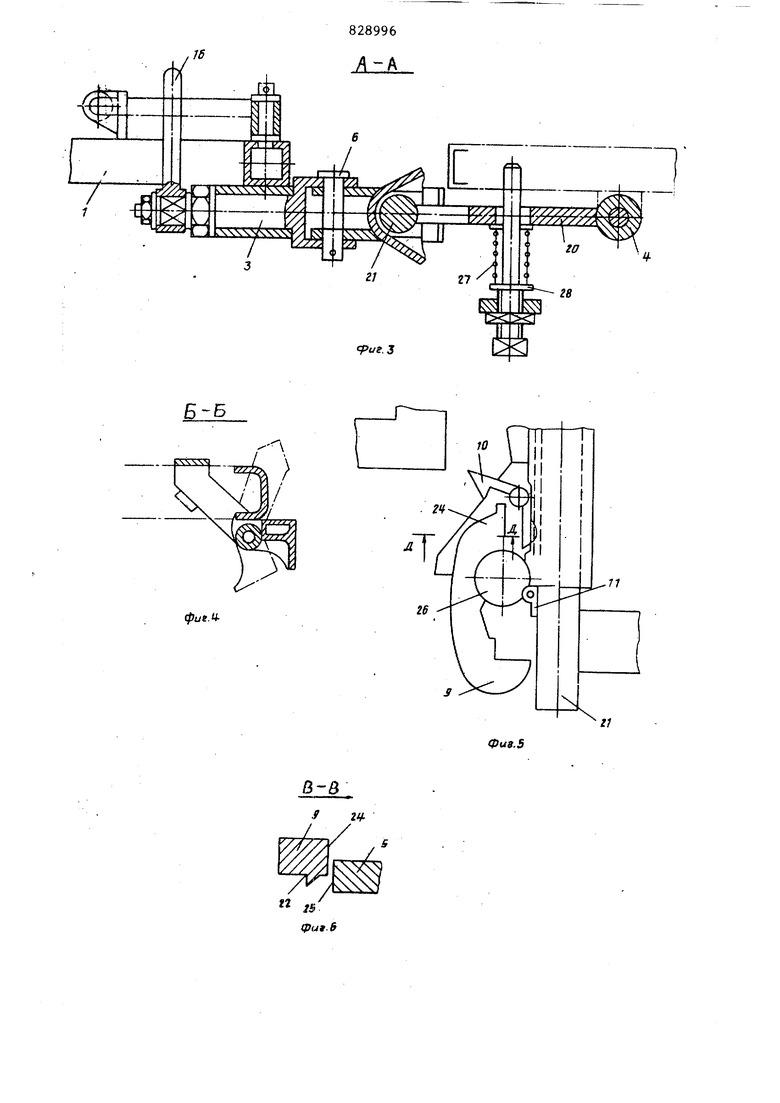
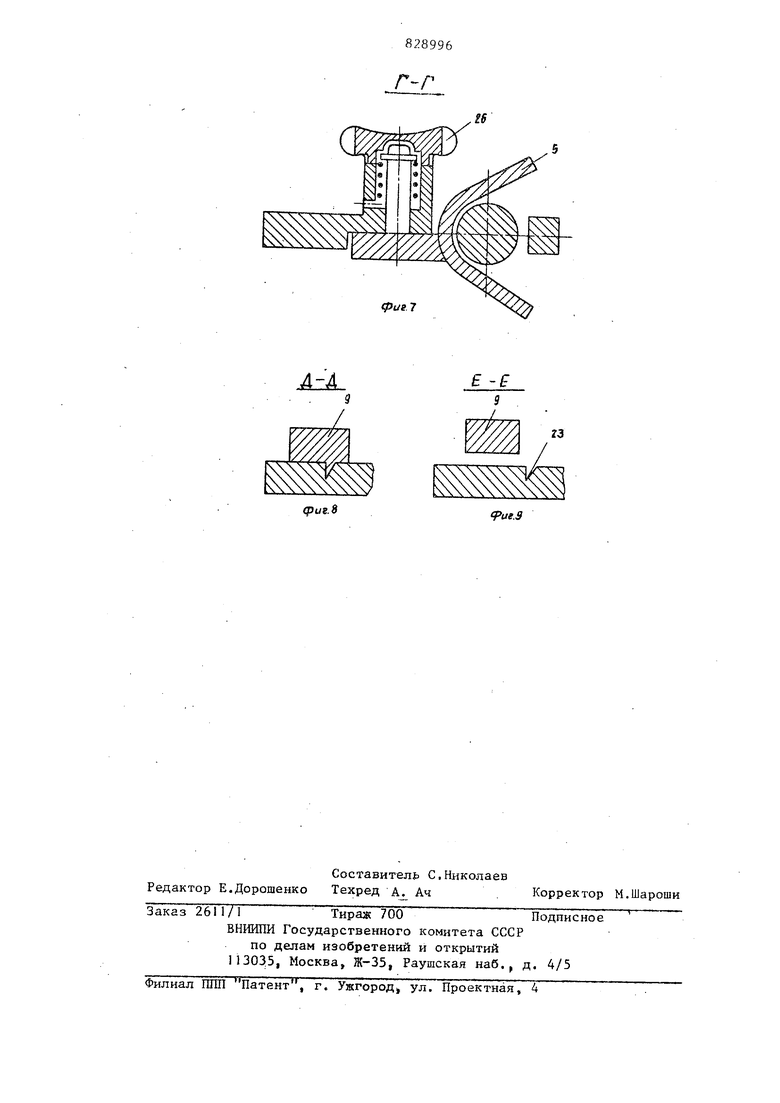
№ 416031, кл. А 01 В 59/00, 197 (прототип) .
г. 7
/
Б-Б
фиеЛ
9 Itf.
/
А-А
/
(риг. 8
г-г
(риг 7
-Е
23
Рие.З
