(54) УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство позиционирования | 1980 |
|
SU930244A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ВЕЩЕСТВ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2169906C2 |
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ | 1991 |
|
RU2031445C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Интегратор | 1980 |
|
SU922786A1 |
| Устройство для управления преобразователем постоянного напряжения в постоянное | 1983 |
|
SU1144174A1 |
| Устройство для измерения вихревого компонента скорости потока | 1980 |
|
SU924578A1 |
| Устройство для считывания графической информации | 1980 |
|
SU883937A1 |
| Устройство для управления следящим приводом | 1982 |
|
SU1108389A1 |
| Устройство для измерения вихревого компонента скорости потока | 1982 |
|
SU1016746A1 |
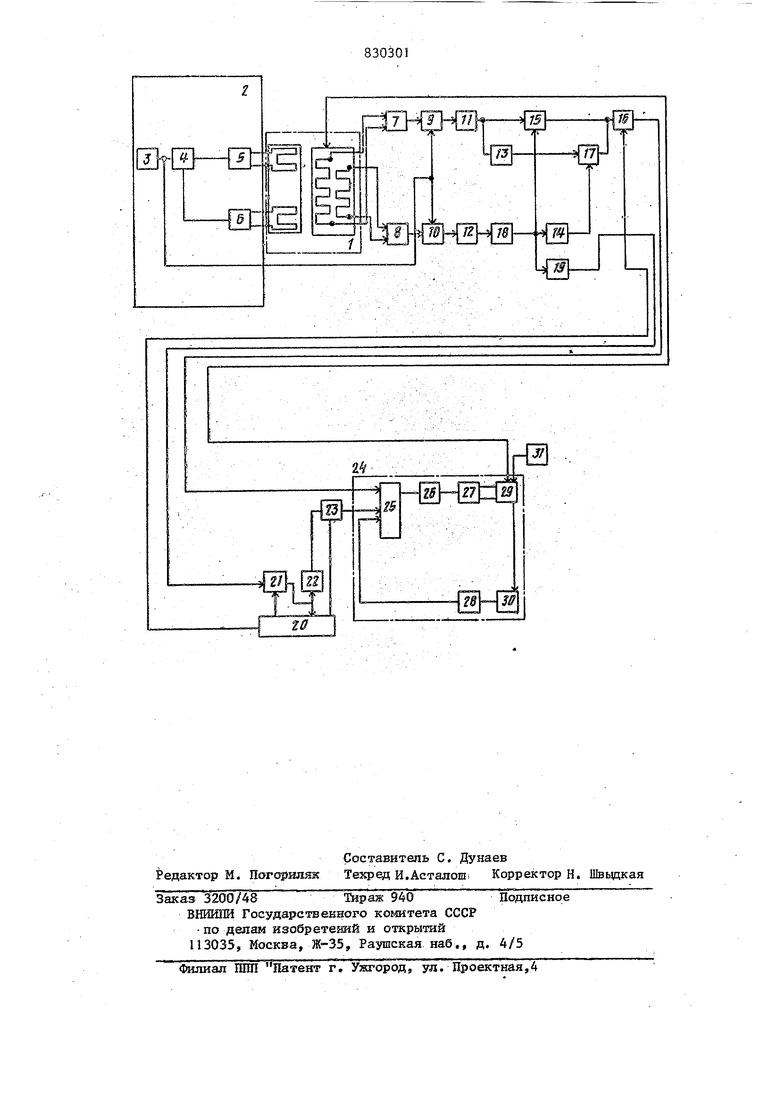
- : , . Изобретение относится к автоматическому управлению и может быть . использовано в оптико-механических или других устройствах позиционирования, Известно устройство позиционирова ния, содержащее привод, каретку, схему сравнения, выход которой через усилитель.подключен к приводу, измерительный преобразователь положения и генератор переменной амплитуды,ко:Торый управляется сигналом ошибки от измерительного преобразователя положения, являющегося потенциометром с ползунковым контактомПЦ. . Однако наличие-ползугасового контакта приводит к ..ошибке рассогласования сигнала, так как амплитуда напряжения зависит от силы прижатия контакта и износа контакта,наличие контакта также ухудшает надежность устройства. Для фиксации положения точного канала использован механический фиксатор, который устройтакже снижает точность Наиболее бдазким по технической сущности к изобретению является уст . ройство дискретного перемещения i iarнитных головок содержащее датчик обратной связи, например линейный индуктосин, синусоидельная и косинусоидальная обмотки которого . подключен) соответственно к первому и второму усилителям, первый, второй и третий ключи, блок дискретного управления, первый выход которого соединен с управляющим входом четвертого ключа, выход которого подключен к первому входу электропривода, выход которого соединен с исполнит.ельным органом, например кареткой, механически связанным с линейным индук-, токсином .21. Недостатком данного устройства также является невысокая точность. Цель изобретения - повьшение точ-. ности устройства. Указанная цель достигается тем, что в него введены первый и второй демодуляторы, первый и второй фильтры, преобразователь код-аналог, вычитающий блок, одновибратор, триггер Шмидта, первый и второй инверторы, выход первого усилителя через первы демодулятор и е1)ильтр подключен к. входу первого ключа, выход которого соединен с входом второго ключа, соединенного через третий ключ и первьш и1-шертор с выходом первого фильтра, а выход второго усилителя, через вторые демодулятор и фильтр подключен к триггеру Шмидта, выход которого соединен с управляющи входом первого ключа, через второй инвертор - с управляющим входом третьего ключа, и через одновибратор с первым входом вычитакщего блока, второй вход которого подключен к второму выходу блока дискретного управления, а выход - ко входу блока дискретного управления и через преобра зователь код-аналог - ко входу четвертого ключа, причем третий выход блока дискретного управлезшя соедине с управляющим входом второго ключа, выход которого под1шючен к второму йходу электропривода. На чертеже приведена блок-схема устройства. Устройство содержит датчик 1 обра ной связи в виде линейного индуктосина, блок 2 питания, содержащий генератор 3, фазосдвигающий блок 3 и усилители 5 и 6, а также первый и вт рой усилители 7 и 8, первый и второй демодуляторы 9 и 10, первый и второй фильтры 11 и 12, первьй и второй инверторы 13 и 14, первый, второй и третий ключи 15,16 и 17, триггер 18 Шмидта, одновибратор 19, блок 20 дискретного управления, выч ;тaюlдий блок 21, преобразователь 22 код-аналог, четвертый ключ 23, электропривод 24, содержащий суммирующий ус литель 25, усилитель 26 мощности, двигатель 27, усилитель 28 скоростно сигнала, каретку 29, датчик 30 скорости. Источником светового луча является лазер 31, Устройство работает следующим образом. Блок 2 питания формирует синусоидальные сигналы, сдвинутые по фазе на 90°и поступающие на первичные обмотки 1 линейного индуктосина. Кроме 14 того, блок 2 пйтагшя формирует опорное напряжение для демодуляторов 9 и 10. С Еторичных обмоток линейного индуктосина .снимаются сигналы, фаза которых изменяется в зависимости от положения дззижка линейного индуктосина. Синусоидальное напряжение, .снимаемое с линейного нндуктрсйна, усиливается усилителем 7, демодулируется фазовым демодулятором 9, фильтруется фильтром II и через первый ключ 15, а также инвертор 13 и третий ключ 17 подается на второй ключ 16, как сигнал рассогласования канала точного поиска. Ко синусоидальное напряжени.е индуктосина усиливается усилителем 8, демодулируется демодулятором 10, фильтруется фильтром 12,. подается на триггер 18 Шмидта и как управляющее напряжение подается на управляющий вход первого ключа 15, а также через инвертор 14 на управляющий вход третьего ключа 17 для формирова;ния дорожек позидаонирования. Второй 36 управляется от блока 20 дискретного управления и коммутирует сигнал канала точного поиска на входе суммирзтощего усилителя 25. Вычитающий блок 21, управляемый командами блока 20 дискретного управления, преобразователь 22 код-аналог и четвертый ключ образуют канал грубого поиска, который служит для перемещения каретки 29 с носителем информации на заданное число дорожек. По команде блока 20 дискретного управления информация пройденного числа дорожекпоступает на информационный вход вычитающего блока 21. На вычитающий вход блока 21 поступает сигнал, от триггера 18 Шмидта, сформированный.одновибратором 19 в виде последовательности имйУльсов, служащих информацией пройденного числа дорожек позиционирования. G вычитающего устройства 21 сигнал разницы заданных и, проеденных позиций подается на преобразователь 22 кодгналог и через четвертый ключ 23 на суммирующий усилитель 25. В момент достижения заданной позиции ключи 16 и 23 переключают сигналы рассогласования с канала грубого поиска на точный, С выхода суммирующего усилителя сигнал рассогласования подается на усилитель 26 мощности, с выхода которого на линейный двигатель 27 привода. Привод, жестко связан с кареткой, транспортирующей носитель информации. К каретке жестко крепится датчик 30 скорости, сигнал датчика 30 скорости усиливается усилителем 28 и поступает на суммирующий усилитель, s образуя петлю скоростной обратной связич Запись транспаранта и голограммы производится лазерЬм 3. Применение предлагаемого устройства в системах записи голограмм позволяет to значительно повысить точность записи, что дает существенный экономический эффект., . Формула изобретения Устройствопозиционирования, содержащее датчик обратной связи, например линейный ивдуктосин, синусоидальная го и крсинусоидальная обмотки которого , подключены соответственно к первому и втброму усилителям, первый, второй и третий ключи, блок дискретного управления, первый выход которого соединен 25 с
Q управляющим входом четвертого клю|ча, выход которого подключен к первому входу электропривода, выход ко- , торого соединен с исполнительным оргарном, например,, кареткой, механически 30 связанным с линейным индуктосином, . отличающееся тем, что, с целью повышения точности, в него вве- дены первый и второй демодуляторы.
первый и второй фильтры, преобразователь код-аналог,вычитающий блок, одновибратор, триггер Шмидта, первый и второй инверторы, выход первого 15
выход которого подключен ко второму входу электропривода.
Источники информации, принятые во внимание при экспертизе
(прототип). усилителя через первые демодулятор и фильтр подключен ко входу первого ключа, выход которого соединен со входом второго ключа, соединенного через третий ключ и первый инвертор с выходом первого фильтра, а выход. второго усшителя через вторые демодулятор и фильтр подключен к триггеру Шмидта, выход которого соединен с управляющим входом первого ключа, через второй инвертор - с управляющим входом третьего ключа,и через одновибратор - с первым входом вычитаю- щего блока, второй вход которого подключей ко второму выходу блока дискретного управления,а выход - ко входу блока дискретного управления и через преобразователь код-аналог - ко входу ;четвертого ключа,причем третий выход блока дискретного управления соединен управляющим входом второго ключа.
