(5) УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство позиционирования | 1979 |
|
SU830301A1 |
| Программируемый преобразователь напряжения произвольной формы в напряжение требуемой формы | 1990 |
|
SU1711303A1 |
| Преобразователь постоянного напряжения в переменное напряжение заданной формы | 1986 |
|
SU1379925A1 |
| Преобразователь постоянного напряжения в переменное программируемой формы | 1981 |
|
SU972650A1 |
| Устройство для программного управления приводом | 1984 |
|
SU1226410A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 1991 |
|
RU2020707C1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| Устройство слежения за дорожкой дискового носителя информации | 1987 |
|
SU1614031A1 |
| Преобразователь угла поворота вала в код | 1981 |
|
SU964688A1 |
| РАДИОПРИЕМНОЕ УСТРОЙСТВО | 1991 |
|
RU2080739C1 |
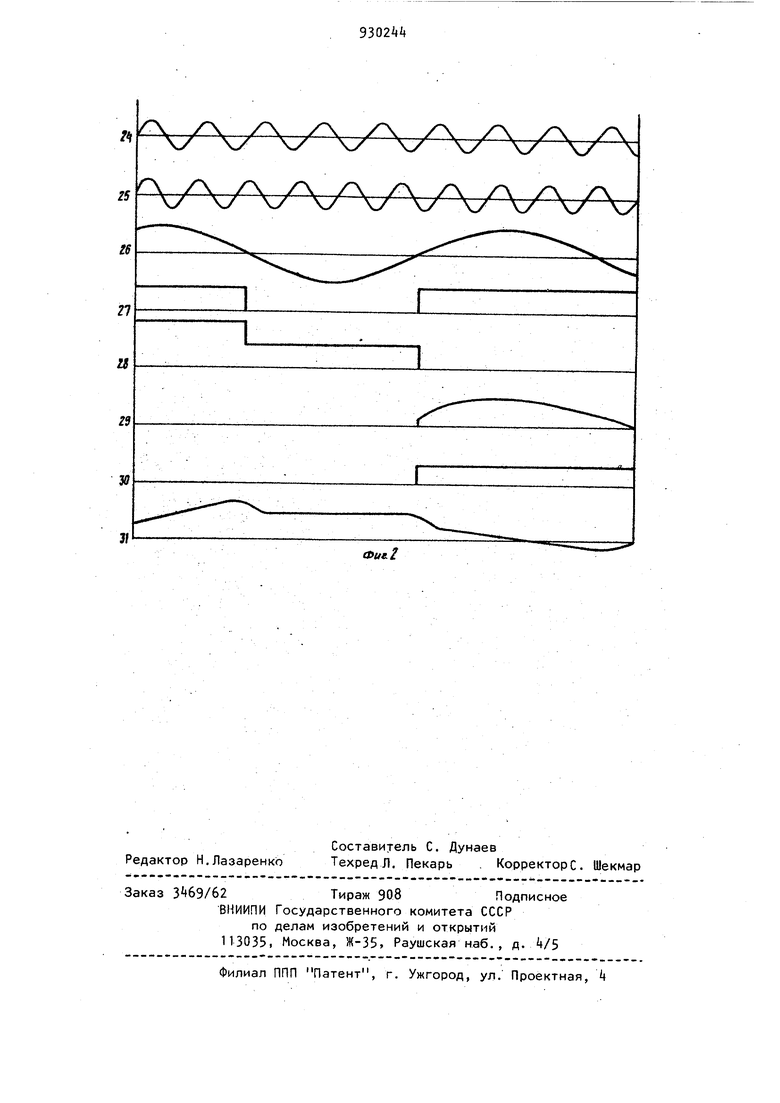
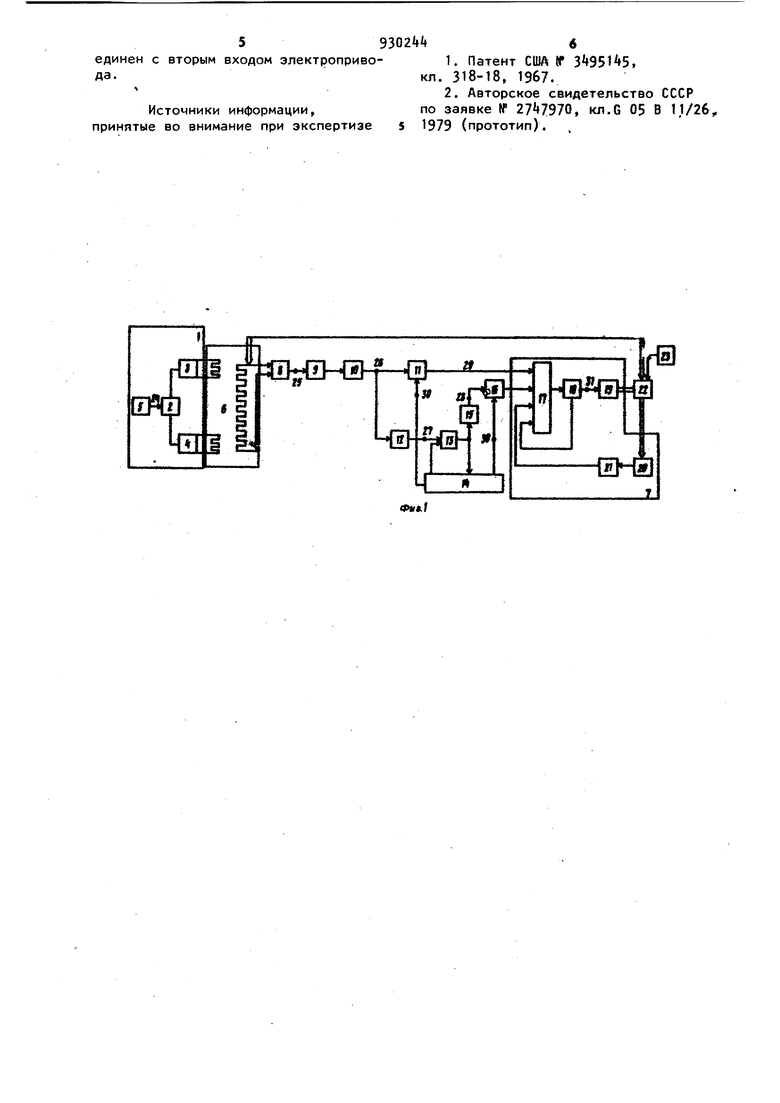
Изобретение относится к автоматическому регулированию и может быть использовано в оптико-механических и других устройствах позиционирования. Известно устройство позиционирования, содержащее привод, каретку,схему сравнения, выход которой через усилитель подключен к приводу, измерительный преобразователь обратной связи и генератор переменной амплитуды, последний управляется сигналом ошибки от измерительного преобразователя положения СООсновными недостатками устройства являются низкая точность и сложность. Наиболее близким к изобретению по технической сущности является устройство позиционирования, содержащее датчик обратной связи, например линей ный индуктосин, выход которого через последовательно соединенные демодулятор и фильтр подключен к информационному входу первого ключа,а также триггер Шмидта и блок дискретного управления, первый выход которого соединен с управляющим входом второго ключа, а второй выход-с первым входом вычитающего блока, выход которого подключен X первому входу блока дискретного управления и через преобразователь .код-аналог,.- к информационному входу второго ключа, выходом соединенного с первым входом электропривода, выход которого соединен с исполнительным органом, например кареткой, механически связанной с датчиком обратной связи. Недостатком известного устройства является сложность. Цель изобретения - упрощение устройства.. Указанная цель достигается тем, что выход фильтра подключен к входу триггера Шмидта, выход которого соединен с вторым входом вычитающего блока, а третий выход блока дискретного управления подключен к уп3B3равляющему входу первого ключа, выход которого соединен с вторым входом электропривода. На фиг. 1 дана блок-схема устройства позиционирования; на фиг, 2 временные диаграммы сигналов на выхо дах функциональных блоков. Устройство содержит блок 1 питания линейного индуктосина, состоящий из фазовращателя 2, согласующих усилителей 3 и t и генератора 5 опорной частоты, линейный индуктосин 6, электропривод 7, усилитель 8, демодулятор 9, фильтр 10, первый ключ 11, триггер Шмидта 12, вычитающий блок 13, блок 14 дискретного управления, преобразователь код-ана лог 15, второй ключ 1б, сумматор 17, усилитель 18 мощности, двигатель 19, датчик 20 скорости, согласующий усил таль 21, каретка 22 и 23. На фиг. 2 обозначены сигнал 2k опорной частоты, сигнал 25 на выходе линейного индуктосина, сигнал 2б на выходе фильтра, сигнал 27 на выходе триггера Шмидта, сигнал 28 на выходе преобразователя аналог-код, сигнал 29 на выходе первого ключа, сигнал 30 на выходе вычитающего блока и сигнал 31 управления двигателем. Устройство работает следующим образом. Питание первичных обмоток линейно го индуктосина осуществляется от бло ка 1 питания. При движении первичных обьоток индуктосина относительно его вторичной на выходе вторичной получаем сигнал 25синусоидальной формы. Индуцированный сигнал 25 синусоидальной формы усиливается усилителем 8, демодули руется демодулятором 9 и фильтруется фильтром 10. Фильтрованный сигнал 2б через аналоговый ключ 11 поступает на 17. Кроме того, сигнал 26поступает на триггер Шмидта 12, который формирует сигнал 27, поступающий на вычитающий блок 13, Ключ 11 управляется от блока Н дискретного управления и коммутирует сигналы 29 томного поиска на входе суммирующего усилителя 17. Информация о пройденном числе дорожек поступает на информационный вход вычитающего блока 13 от блока k дискретного управления. С вычитающего блока 13 сигнал разности пройденных и заданных дорожек п дается на преобразователь код-аналог 15 и как управляющее воздействие 28 пос тупает на сумматор 17 через второй ключ 16. В момент достижения заданной позиции ключи 11 и 1б по команде блока Ik дискретного управления сигналом 30 переключают сигналы грубого поиска на точный, при этом сигнал точного поиска поступает на сумматор 17. С выхода сумматора 17 сигнал рассогласования усиленный усилителем 18 мощности, поступает на управление двипэтелем 19. Последний перемещает каретку 22, которая транспортирует но ситель информации. Запись (считывание) транспаранта или голограммы производит ся лазером 23. Таким образом, при более простой структуре устройства функционирование и достигаемые при этом параметры позиционирования не уступают известному устройству, что позволит получить, в случае использования изобретения, определенный технико-экономический эффект. Формула изобретения Устройство позиционирования, содержащее датчик обратной связи, например линейный индуктосин, выход которого через последовательно соединенные демодулятор и фильтр подключен к информационному входу первого клю , ча, а также триггер Шмидта и блок дискретного управления, первый выход которого соединен с управляющим входом второго ключа, а второй выходс первым входом вычитающего блока, выход которого подключен к первому входу блока дискретного управления и через преобразователь код-аналог к информационному входу второго ключа, выходом соединенного с первым входом электропривода, выход которого соединен с исполнительным органом, например кареткой, механически связанной с датчиком обратной связи, отличающееся тем, что,с целью упрощения устройства, выход фильтра подключен к входу триггера Шмидта, выход которого соединен с вторым входом вычитающего блока, а третий выход блока дискретного управления подключен к управляющему входу первого ключа, выход которого со593024t6
единен с вторым входом электроприво- 1. Патент США (Р , да.кл. 318-18, 1967.
Источники информации,по заявке If , кл.б 05 В 11/2б
принятые во внимание при экспертизе 5 1979 (прототип). / 4/V4y w w- v
Фил/
