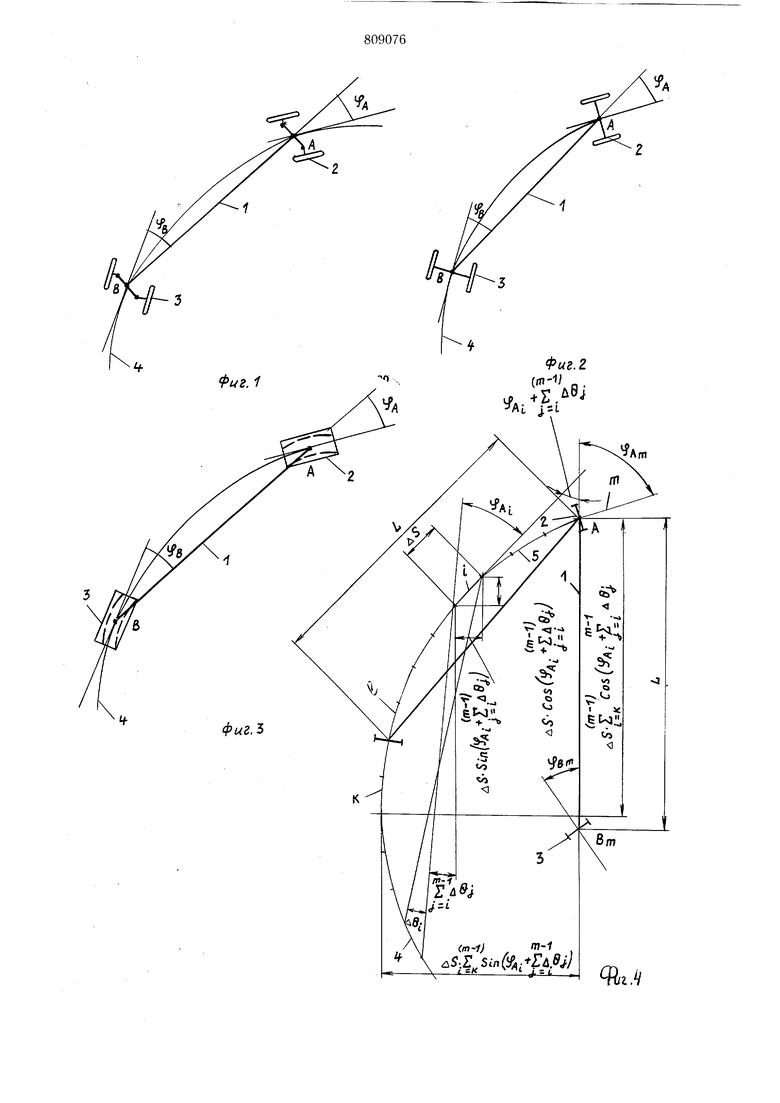
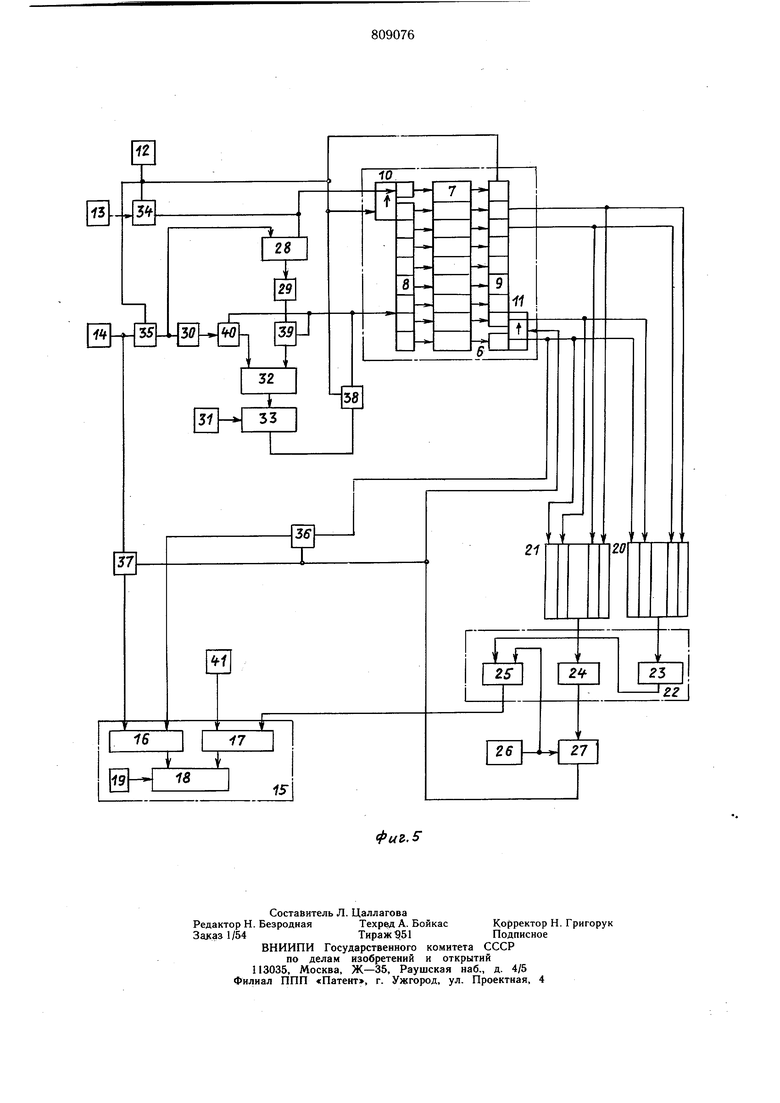
Изобретение относится к управляющим устройствам, используемых на транспортных средствах, в частности для управления с помощью поворота колес или их осей многоколесным транспортным средством. Известно устройство для управления транспортным средством, содержащее запоминающее устройство, датчики пути, датчики приведенных углов поворота передних и задних колес относительно соединительной рамы транспортного средства и следящий привод поворота задних колес относительно соединительной рамы 1. Однако известное устройство не обеспечивает слежения за положением задних колес и их возвращения на требуемую траекторию после случайного отклонения. Наиболее близким к предлагаемому является устройство для управления транспортным средством, содержащее синусные и косинусные преобразователи, масштабирующие блоки, ключи, датчик пройденного пути, связанный с управляющими входами первого и второго ключей и с первым входом блока памяти, выходы синусного и косинусного преобразователей подключены к первым входам функционального преобразователя, .первый выход которого соединен с первым входом блока сравнения, второй вход которого связан с выходом первого масштабирующего блока, а выход - со вторым входом блока памяти и с управляющими входами третьего и четвертого ключей, выходы которых соединены соответственно с первым и вторым входами следящего привода, а входы соответственно - с первым выходом блока памяти и с выходом датчика приведенных углов поворота задних колес, связанным со входом второго ключа, выход датчика приведенных углов поворота передних колес связан со входом первого ключа 2. Недостатком известного устройства является наличие гироскопического датчика угла поворота соединительной рамы транспортного средства относительно неподвижной в пространстве оси. Использование гироскопических датчиков на наземных транспортных средствах показало, что значительная запыленность воздуха, колебания и вибрации, характерные для режима движения, отрицательно сказываются на надежности и долговечности датчика, содержащего прецизионные постоянно вращающиеся элементы, подверженные износу. Вследствие этого с течением времени в результате накапливаемой погрешности происходит так называемый увод показаний датчика, значительно снижающий его точность и приводящий к большим ощибкам в управлении транспортным средством. Цель изобретения - повышение точности и упрощение устройства для управления транспортным средством. Указанная цель достигается тем, что устройство для управления транспортным средст вом содержит блок косинусного преобразования приведенного угла поворота задних колес, блок синусного преобразования разностного угла, вычитатель и последовательно соединенные делитель и умножитель, второй вход которого подключен к выходу второго масштабирующего блока, а выход через пятый ключ - к третьему входу блока памяти и к управляющим входам шестого и седьмого ключей, выход датчика пройденного пути соединен с четвертым входом блока памяти и с управляющим входом пятого ключа, выход первого ключа подключен к пятому входу блока памяти и к первому входу вычитателя, второй вход которого связан с выходом второго ключа и со входом блока косинусного преобразования приведенного угла поворота задних колес, а выход через блок синусного преобразования разностного угла - со входом шестого ключа, вход седьмого ключа соединен с выходом блока косинусного преобразования приведенного угла поворота задних колес, а выходы. шестого и седьмого ключей подключены к соответствующим входам делителя, вторые выходы блока памяти соединены с соответствующими входами синусного и косинусного преобразователей, третий вход следящего привода соединен с третьим масштабирующим блоком, а четвертый вход - со вторым выходом функционального преобразователя, второй вход которого подключен к выходу первого масштабирующего блока. Такое выполнение устройства позволяет при отслеживании траектории переднего колеса использовать подвижную систему координат, связанную с соединительной рамой транспортного средства, при этом не происходит накопления ошибки, свойственной гироскопическому датчику, снижается стоимость устройства, упрощается его обслуживание, повышается надежность и долговечность. На фиг. 1 показано транспортное средство, снабженное передними и задними управляемыми колесами; на фиг. 2 - то же, снабженное передними и задними колесами, установленными на поворотных осях; на фиг. 3 - то же, снабженное передними и задними управляемыми колесами, объединенными в переднюю и заднюю noBopOTHbie тележки; на фиг. 4 - положение транспортного средства при движении передних и задних колес по одной трактории и при смещении задних колес с траектории передних; на фиг. 5 - структурная схема устройства. Транспортное средство содержит соединительную раму 1, связанную в точках А и В соответственно с передними 2 и задними 3 управляемыми колесами (фиг. 1, 2, 3). Колеса перемещаются по траектории 4, условно разбитой на ряд последовательных элементарных участков 5, длина каждого из которых составляет величину 4S (фиг. 4). Порядковые номера участков 5, отсчитываемые от точки начала движения передних колес, обозначены индексом j. Индексами m и t обозначены соответственно номера элементарных участков 5 траектории 4, где находится передняя точка А соединительной рамы 1 и должна находиться задняя точка В этой рамы. Расстояние по хорде между участками m и равно длине L соединительной рамы 1. В результате случайного отклонения задние колеса могут находиться в точке В«, расположенной вне траектории 4 перемещения передних колес 2 (индекс точки В определяется номером участка 5 траектории 4, на котором находится в данный момент передняя точка А соединительной рамы 1). Устройство для управления транспортным средством содержит также блок памяти 6 (фиг. 5), снабженный носителем информации 7, задающим 8 и Считывающим 9 элементами и приводами 10 и 11 перемещения этих элементов относительно носителя информации 7; датчик 12 пройденного пути, вырабатывающий сигнал при перемещении передних колес 2 на расстояние, равное длине Д S каждого элементарного участка 5 траектории 4, и датчики 13 и 14 приведенных углов поворота соответственно передних 2 и задних 3 колес относительно соединительной рамы 1; следящий привод 15, имеющий блоки сравнения 16 и 17, сумматор 18 и исполнительный механизм 19; синусный 20 и косинусный 21 преобразователи, осуществляющие вычисление синусов и косинусов последовательных значений углов, каждый из которых равен сумме приведенного угла поворота передних колес 2 относительно соединительной рамы 1 при перемещении по данному участку 5 траектории 4 и угла поворота соединительной рамы 1 при перемещении по данному и последующим участкам 5 траектории 4; функциональный преобразователь 22, имеющий сумматоры 23 и 24, суммирующие соответственно последовательные значения синусов и косинусов, поступающие из преобразователей 20 и 21, делитель 25, который осуществляет деление суммы синусов, полученной в сумматоре 23, на значение первого постоянного коэффициента, содержащегося в первом масштабирующем блоке 26. К выходу сумматора 24 подключен блок
сравнения 27, обеспечивающий сопоставление сигнала на первом выходе функционального преобразователя 22 со значением первого постоянного коэффициента, содержащегося в масштабирующем блоке 26.
Предлагаемое устройство снабжено вычитателем 28, осуществляющим вычитание значений приведенного угла поворота задних колес 3 относительно соединительной рамы 1 из значений приведенного угла поворота передних колес 2 относительно соединительной рамы 1 блоком 29 синусного преобразования разностного угла и блоком 30 косинусного преобразования приведенного угла поворота задних колес 3 относительно соединительной рамы 1, масштабирующим блоком 31, содержащим значение второго постоянного коэффициента; делителем 32, осуществляющим деление синуса разностного угла, полученного в блоке 29, на косинус приведенного угла поворота задних колес 3 относительно соединительной рамы 1, умножителем 33, осуществляющим умножение последовательных значений частного, поступающих из делителя 32 на значение постоянного коэффициента 31.
Устройство снабжено ключами 34-40, каждый из которых имеет вход, выход и управляющий вход, и третьим масштабирующим блоком 41, содержащим значение третьего постоянного коэффициента.
Датчик 12 пройденного пути связан с управляющими входами ключей 34, 35 и 38, а также с первым и четвертым входами блока памяти 6. Вход ключа 34 соединен с датчиком 13 приведенного угла поворота передних колес 2, вход ключа 35 - с датчиком 14 приведенного угла поворота задних колес 3. Выход ключа 34 присоединен к пятому входу блока памяти б и первому входу вычитателя 28, выход которого через блок 29 синусного преобразования разностного угла и ключ 29 соединен с первым входом делителя 32.
Выход ключа 35 соединен со вторым входом вычитателя 28 и входом блока 30 косинусного преобразования приведенного угла поворота задних колес 3 относительно соединительной рамы 1. Выход блока 30 через ключ 40 присоединен ко второму входу делителя 32, выход которого присоединен к первому входу умножителя 33, второй вход котарого связан с выходом второго масштабирующего блока 31.
Выход умножителя 33 через ключ 38 соединен с управляющими входами ключей 39 и 40, а также с третьим входом блока памяти 6.
Вторые выходы блока памяти 6 соединены каждый с соответствующими входами синусного 20 и косинусного 21 преобразователей, выходы которых присоединены к первым входам функционального преобразователя 22. Ко второму входу функционального преобразователя 22 подключен выход первого масштабирующего- блока 26. Выход блока 26 связан также со вторым входом блока сравнения 27, к первому входу которого присоединен первый выход функционального преобразователя 22.
Выход блока сравнения 27 соединен со вторым входом блока памяти бис управляющими входами ключей 36 и 37. Ко входу ключа 36 присоединен первый выход блока памяти 6, а ко входу ключа 37 - датчик 14 приведенного угла поворота задних колес 3 относительно соединительной рамы 1. Выходы ключей 36 и 37, третьего масштабирующего блока 41 и второй выход функционального преобразователя 22 присоединены соответственно к первому, второму, третьему и четвертому входам следящего привода 15 поворота задних колес 3 относительно соединительной рамы 1.
Устройство для управления транспортным средством работает следующим образом.
В рассматриваемый момент времени передняя точка А соединительной рамы 1 располагается на элементарном участке 5 траектории 4, имеющем порядковый номер ш. Для обеспечения следования задней точки В по траектории 4 передних колес 2 она должна находиться на участке 5, имеющем порядковый номер 6, Однако в общем случае, в результате случайного отклонения задняя точка В соединительной рамы 1 может находиться в точке Вт, расположенной вне траектории 4.
Датчик 12 пройденного пути срабатывает при перемещении передних колес 2 на каждый участок 5 траектории 4, длина которого равна величине Д S. Импульс датчика 12 открывает ключи 34, 35 и 38, а также приводит в действие привод 10, обеспечивающий перемещение на один шаг задающего элемента 8 относительно носителя информации 7.
При срабатывании ключа 34 текущее значение приведенного угла MAJ поворота передних колес 2 относительно соединительной рамы 1 поступает из датчика 13 в последнюю ячейку задающего элемента 8 блока памяти 6 и заносится в первую свободную ячейку носителя информации 7. Одновременно с этим значение угла Чд4 подается на вход вычитателя 28.
9 При срабатывании ключа 35 в вычитатель 28 и блок 30 косинусного преобразования пвступает текущее значение приведенного угла f поворота задних колес 3 относительно соединительной рамы 1. В блоке 30 вычисляется функция
cosM j, .(1)
и полученное значение поступает на вход ключа 40.
В вычитателе 28 осуществляется вычитание значения приведенного угла Hg noBopo та задних колес 3 из значения приведенного угла Чд поворота передних колес для получения выражения.
().
Значение разностного угла (2) передается в блок 29 для вычисления функции sin ()(3) Полученное значение синуса разностного угла (3) подается на вход ключа 39. Результаты вычислений по выражениям (1) и (3) впоследствии будут введены в делитель 32 для деления по выражению tn(fAJ1RJ) Значение частного (4) поступает в умножитель 33, в который подводится также значение второго постоянного коэффициента , содержащееся во втором масщтабирующем блоке 31. В умножителе 33 осуществляется вычисление произведения 4S. StttC fAi- Pai выражение (5) определяет угол A0j поворота соединительной рамы 1 при перемещении передних колес 2 по элементарному участку 5 траектории 4, имеющему порядковый номер J. При срабатывании ключа 38 из умножителя 33 поступает значение угла ), вычисленное по выражению (5) при предыдущем срабатывании датчика 12 пройденного пути. Значение угла A8(jM) подается через ключ 38 во все ячейки задающего элемента 8 и заносится во все ячейки носителя информации 7, исключая последнюю. Одновременно с этим открываются ключи 39 и 40, и в делитель 32 вводятся результаты вычислений по выражениям (1) и (3) для определения по выражению (5) значения угла AQj Таким образом, после очередного срабатывания ключа 38, в каждой кроме последней, используемой ячейке носителя информации 7, имеющей порядковый номер i, который соответствует номеру пройденного передними колесами 2 участка 5 траектории 4, содержится значение Выражение (6) определяет сумму приведенного угла рд; поворота передних колес 2 относительно соединительной рамы 1 при перемещении -по участку 5.траектории 4, имеющему порядковый номер i, и угла поворота соединительной рамы 1 при перемещении по участку i и последующим участкам 5 траектории 4. Значение угла по выражению (6) равно значению угла наклона участка 5 траектории 4, имеющего порядковый номер i, относительно текущего мгновенного положения соединительной рамы 1. При срабатывании датчика 12 пройденного пути подается импульс в считывающий элемент 9 блока памяти 6, который вызывает поступление из каждой пользуемой ячейки носителя информации 7, кроме последней, содержащегося в ней значения угла (6) в соответствующие ячейки синусного 20 и косинусного 21 преобразователей. В каждой ячейке синусного преобразователя 20 осуществляется вычисление svtv(l + Z:AQi). 14. Выражение (7) определяет величину, пропорциональную проекции отрезка 5 траек тории 4, имеющего порядковый номер i, на ось, перпендикулярную текущему мгновенному положению соединительной рамы 1. В каждой ячейке косинусного преобразователя 21 осуществляется вычисление cos( л 80. « Выражение (8) определяет величину, пропорциональную проекции отрезка 5 траек тории 4, имеющего порядковый номер i, на ось, совмещенную с текущим мгновенным положением соединительной рамы 1. Результаты вычислений по выражениям (7) и (8) из всех ячеек преобразователей 20 и 21 поступают соответственно в сумматоры 23 и 24 функционального преобразователя 22, где осуществляется суммирование поступающих значений для получения выражений:m-iти-л .2 siu(SAi.Aej), . а .|Гсоз(,.л9р, где К - номер участка 5 траектории 4, который пересекается с перпендикуляром, восстановленным к соединительной раме 1 из ее задней точки Б. Значение угла Удк является первым из значений AJ, содержащихся в данный момент в ячейках носителя информации 7 блока памяти 6. Выражение (10) определяет величину, пропорциональную сумме проекций всех участков 5 траектории 4 на ось, совмещенную с текущим мгновенным положением соединительной рамы 1, располагающихся в пределах длины L соединительной рамы 1. Выражение (9) определяет величину, пропорциональную сумме проекций указанных участков 5 на ось, перпендикулярную текущему мгновенному положению соединитель-ной рамы 1. Для определения номера К участка 5 траектории 4 результат вычисления по выражению (10) поступает в блок сравнения 27, где coпocтaвляetcя со значением постоянного коэффициента л (11) содержащегося в первом масщтабирующем блоке 26. Величина (10) достигает значения (11), когда сумма проекций на ось, совмещенную с текущим мгновенным положением соединительной рамы 1, всех.учасков 5 траектории 4, на которых зафиксированы значения угловом, содержащиеся в носителе информации 7, становится равной длине L соединительной рамы 1.
В указанный момент блок сравнения 27 вырабатывает импульс, приводящий в действие привод 11, обеспечивающий перемещение на один шаг считывающего элемента 9 блока памяти 6 относительно носителя информации 7. При этом содержащееся в освобождающейся первой ячейке носителя информации 7 значение угла (6) стирается и, тем самым, ячейка подготавливается для последующего использования.
Результат вычисления по выражению (9) из сумматора 23 функционального преобразователя 22 передается в делитель 25 для деления на значение постоянного коэффициента (11), поступающее из первого масщтабирующего блока 26:
лО IL; f -
).(12)
Выражение (12) определяет угол между текущим мгновенным положением соединительной рамы 1 и ее положением, соответствующим следованию задних колес 3 по траектории 4 передних колес 2.
Результат вычисления по выражению (12) поступает в блок сравнения 17 следящего привода 15, сопоставляющий полученный сигнал со значением третьего постоянного коэффициента, равным нулю, поступающим из третьего масштабирующего блока 41. В случае отклонения задних колес 3 от траектории 4 блок 17 вырабатывает сигнал рассогласования, поступающий в сумматор 18.
При поступлении импульса из блока срав нения 27 открываются третий 36 и четвертый 37 ключи чем обеспечивается поступление в блок сравнения 16 следящего привода 15 значения угла (6), содержащегося в освобождающейся первой ячейке носителя информации 7, и текущего значения угла поворота задних колес 3 относительно соединительной рамы 1. Эти значения сравниваются между собой и блок 16 вырабатывает сигнал рассогласования в случае, если угол 6j не соответствует значению, необходимому для следования задних колес 3 по траектории 4 передних колес 2.
Сигналы рассогласования, выработанные блоками сравнения 16 и 17, алгебраически суммируются в сумматоре 18, откуда суммарный сигнал поступает в исполнительный механизм 19 следящего привода 15, осуществляющий поворот задних коле( 3 относительно, соединительной рамы 1 для устранения рассогласования.
Технико-экономическая эффективность предлагаемого устройства обуславливается упрощением его конструкции, применением в ней однотипных элементов, повыщением долговечности устройства его точносуи и надежности, что, в свою очередь, уменьщает ширину габаритной полосы движения транспортных средств, улучщает условия безопасности движения, способствует повышенчю производительности транспортных средств и уменьшает создаваемые ими помехи.
Формула изобретения
Устройство для управления транспортным средством, содержащее синусные и косинусные преобразователи, масштабирующие блоки, ключи, датчик пройденного пути, связанный с управляющими входами первого и второго ключей и с первым входом блока памяти, выходы синусного и косинусного преобразователей подключены к первым входам функционального преобразователя, первый выход которого соединен с первым входом блока сравнения, второй вход которого связан с выходом первого масштабирующего блока, а выход - со вторым входом блока памяти и с управляющими входами третьего и четвертого ключей, выходы которых соединень соответственно с первым и вторым входами следящего привода, а входы соответственно - с первым выходом блока памяти и с выходом датчика приведенных углов поворота задних колес, связанным со входом второго ключа, выход датчика приведенных углов поворота передних колес связан со входом первого ключа, отличающееся тем, что, с целью повыщения точности и упрощения устройства, оно содержит блок косинусного преобразования приведенного угла поворота задних колес, блок синусного преобразования разностного угла, вычитатель и последовательно соединенные делитель и умножитель, второй вход которого подключен к выходу второго масщтабирующего блока, а выход через пятый ключ - к третьему входу блока памяти и к управляющим входам шестого и седьмого ключей, выход датчика пройденного пути соединен с четвертым входом блока памяти и с управляющим в.ходом пятого ключа, выход первого ключа подключен к пятому входу блока памяти и к первому входу вычитателя, второй вход которого связан с выходом второго ключа и со входом блока косинусного преобразования приведенного угла поворота задних колес, а выход через блок синусного преобразования разностного угла - со входом щестого ключа, вхоХ седьмого ключа соединен с выходом блока косинусного преобразования приведенного угла поворота задних колес, а выходы шестого и седьмого ключей подключены к соответствующим входам делителя, вторые выходы блока памяти соединены с соответствующими входами синусного и косинусного преобразователей, третий вход следящего привода соединен с третьим масштабирующим блоком, а четвертый вход - со вторым выходом функционального преобразователя, второй вход которого подключен к выходу первого масштабирующего блока.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 446448, кл. В 62 D 7/00, 1971.
2.Авторское свидетельство СССР по заявке № 2562109/11, кл. В 62 D 7/14, 1977 (прототип). . 1 Фиг.2 ., +i;. AL гМ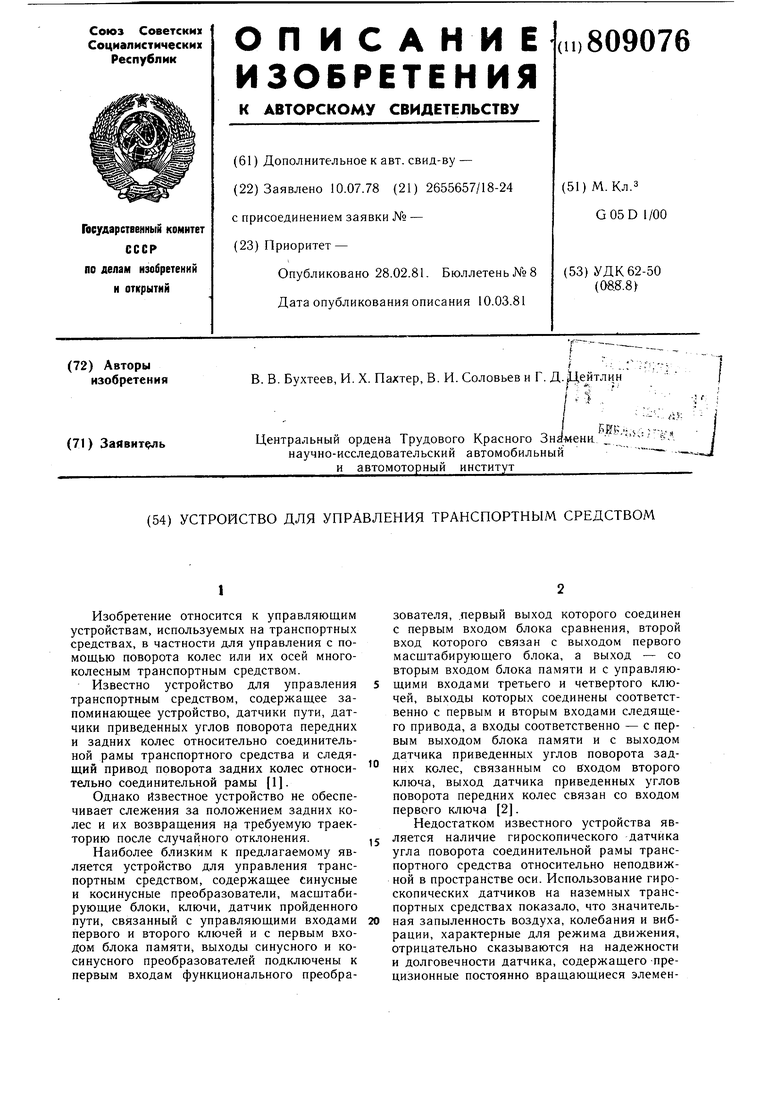
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство рулевого управления транспортного средства | 1977 |
|
SU734049A1 |
| Многоканальный преобразователь угла поворота вала в код | 1984 |
|
SU1211888A1 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1530897A1 |
| Способ программного управления угледобывающим комбайном и система для его осуществления | 1984 |
|
SU1250651A1 |
| Способ управления очистным комбайном и устройство для его осуществления | 1990 |
|
SU1809042A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| Способ автоматического управления режущими органами очистного комбайна | 1986 |
|
SU1472670A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2011 |
|
RU2465168C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ СОПРОВОЖДЕНИЯ ВОДОЛАЗА | 2017 |
|
RU2672505C1 |