В авт. св. 98785 описан электропривод для станков с исполнительным двигателем постоянного тока и электромашинным усилителем в качестве генератора, имеющим обратные связи по напряжению и приращению напряжения, по току и скорости двигателя. Последняя осуществляется посредством регулятора скорости, состоящего из тахогенератора, механически связанного с исполнительным двигателем и электронного усилительного устройства, воздействующего на управляющую обмотку электромашинного усилителя при нарушении равенства напряжения тахогенератора и эталонного напряжения, устанавливаемого потенциометром задатчика скорости.
Настоящее изобретение представляет собой дополнительное изобретение, имеющее целью расширить диапазон регулирования скорости, улучшить динамические и статические .характеристики и упростить схему привода, описанного в указанном авторском свидетельстве.
Поставленная задача решается путем выполнения электронного усилительного устройства, входящего в цепь обратной связи по скорости двигателя, с переменным коэффициентом усиления, уменьшающимся с увеличением уставки скорости электропривода.
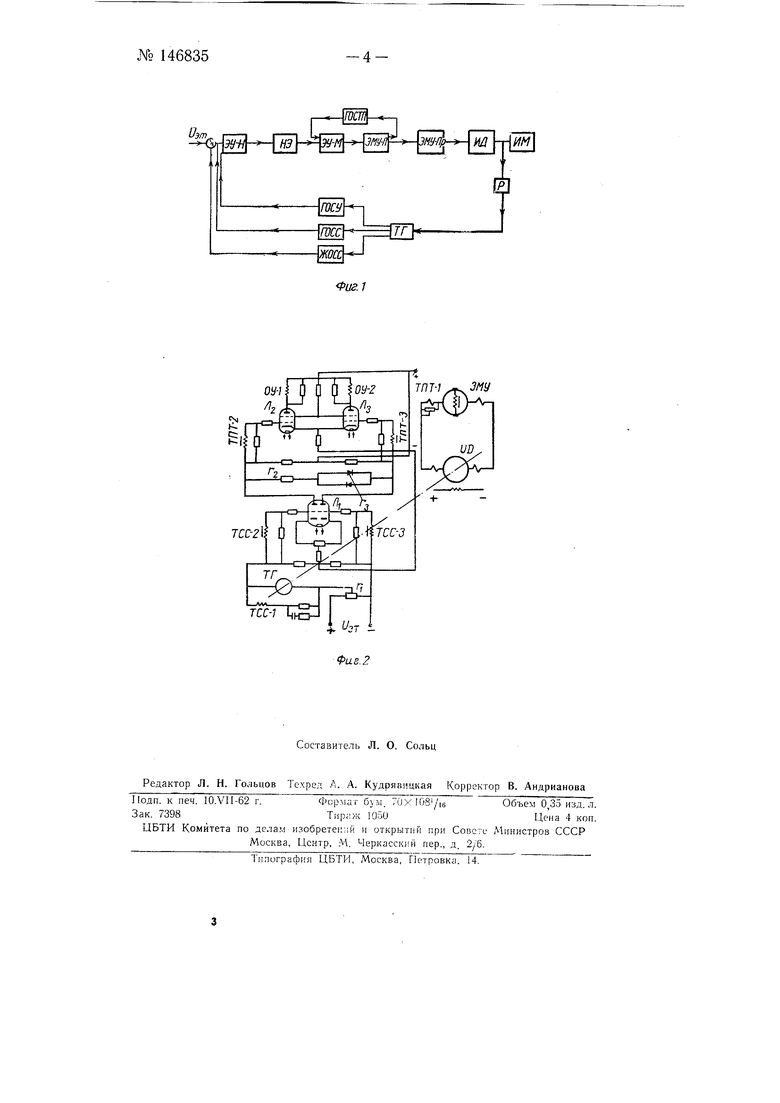
Фиг. 1 изображает структурную схему предлагаемого электропри-вода; фиг 2 - его принципиальную схему.
На фиг. 1 приняты следующие обозначения:
Warn -эталонное напряжение сравнения; ЭУ-Н - электронный усилитель напряжения; НЭ - нелинейный элемент; ЭУ-М - электронный усилитель мощности; ЭМУ-П и ЭМУ-Пр-поперечная и продольная цепи электромашинного усилителя ЭМУ; ИД - исполнительный двигатель; ИМ - исполнительный механизм; Р-редуктор; ТГ - тахогенератор; ГОСТП - гибкая обратная отрицательная связь по приращению тока поперечной цепи электромашинного усилителя; ЖОСС и ГОСС - жесткая и гибкая обратные отрицательные связи по скорости исполнительного двигателя; ГОСУ-гибкая обратная отртщательная связь по приращению скорости двигателя.
№ 146835-2Широкий диапазон изменения скорости исполнительного двигателя UD в Предлагаемом приводе, так же как и в приводе по авт. св. № 98785, обеспечивается применением глубокой жесткой отрицательной связи по скорости ЖОСС. Введение в промежуточное электронное усилительное устройство нелинейного элемента НЭ позволяет применить жесткую отрицательную связь по скорости ЖОСС во всем диапазоне изменения скорости исполнительного двигателя при относительно малом числе стабилизирующих звеньев системы.
Гибкие обратные отрицательные связи ГОСС и ГОСУ по первой и второй производным от скорости исполнительного двигателя ИД осуществляются трансформатором, первичная обмотка ТСС-1 которого через активное сопротивление г и С-цепочку присоединена параллельно якорю тахогенератора ТГ, а вторичные обмотки ТСС-2 и ТСС-3 включены в сеточные цепи первого каскада Л электронного усилительного устройства. Гибкая обратная отрицательная связь ло изменению тока .поперечной цепи электромашинного усилителя ГОСТП осуществляется трансформатором ТПТ, первичная обмотка ТПТ-1 которого включена в поперечную цепь электромащинного усилителя ЭМУ, а вторичные ТПТ-2 и ТПТ-3 - в сеточные цепи ламп JIz и Л-,, выходного каскада усилительного устройства.
Выход первого каскада усилительного устройства нагружен на активное нелинейное сопротивление, состоящее из двух частей: сопротивления фиксированной величины г и нелинейного сопротивления Гз.
В качестве нелинейного сопротивления используются селеновые выпрямительные шайбы.
Так как выход первого каскада нагружен на нелинейное сопротивление, то по мере возрастания напряжения сопротивление цепи Гз+Гз уменьшается по определенному закону и путем соответствующего подбора величин сопротивлений Г2 и Гз можно получить желаемую характеристику Kisy f(Uex} гДб: Kiay -коэффициент усиления первого каскада электронного усилительного устройства и О. - напряжение на входе этого каскада.
Направление вращения и изменение скорости исполнительного двигателя ИД привода осуществляется изменением полярности и величины сигнала сравнения - эталонного напряжения f/,,,
Так как система замкнута, то на вход первого каскада электронного усилительного устройства подается разность напряжения U т и напряжения жесткой отрицательной обратной связи по скорости ЖООС, формируемого тахогенератором ТГ.
Если полярность результирующего напряжения такова, что сетка левого триода первого каскада /7i получает положительное приращение напряжения, а сетка правого триода - отрицательное приращение напряжения, то анодный ток левого триода увеличивается, а правого уменьщается. Следовательно, увеличивается падение напряжения на сопротивлении левого плеча анодной нагрузки каскада и уменьшается на сопротивлении правого плеча этой анодной нагрузки.
На выходе первого каскада электронного усилительного устройства возникает напряжение, которое поступает на вход второго каскада. При этом сетка лампы Л получает положительное, а сетка лампы Л - отрицательное приращение напряжения. Ток в обмотке управления ОУ-1 электромащинного усилителя увеличивается, а в обмотке ОУ-2 уменьщается. Так как по магнитодвижущей силе эти обмотки включены встречно, то при этом образуется разность ампер-витков обмоток управления электромащинного усилителя, обеспечивающая требуемое для заданного значения скорости и данной нагрузки напряжение продольной цепи ЭМУ-Пр, которое подается па якорь исполнительного двигателя ЯД.
При отклонении скорости исполнительного двигателя от заданной (например, из-за нагрузки на валу) изменяется выходное напряжение тахогенератора ГГ.
Соответственно этому величина результирующего напряжения, поступающего на вход первого каскада электронного усилительного устройства, величина результирующих ампер-витков управления электромашинпого усилителя и величина напряжения продольной цепи ЭМУ-Пр изменяются так, что заданное значение скорости исполнительного двигателя восстанавливается. Так как система статическая, то при увеличении уставки скорости исполнительного двигателя увеличивается напряжение на входе первого каскада электронного усилительного устройства, а следовательно, увеличивается напряжение на выходе этого каскада.
По мере увеличения этого напряжения прямое сопротивление нелинейното элемента НЭ (селеновые выпрямители) уменьщаются по определенному закону.
В результате этого уменьщается нагрузка первого каскада электронного усилительного устройства, что вызывает падение его коэффициента усиления и, следовательно, уменьщение коэффициента усиления системы. Но так как уменьщение этого коэффициента усиления Кау подчинено определенному закону, при котором статизм системы не больще заранее заданного, то это не точности системы, как это вытекает из формулы:
г. 4-. . 1
А .,,, .1
КЛ.ЧУK,)s-Km.;-Kf, L н -дегде: Кау - коэффициент усиления промежуточного электронного усилительного устройства;
Кзму-коэффициент усиления электромащинного усилителя;
К gg - коэффициент передачи исполнительного двигателя;
Кт-ч-коэффициент передачи тахогенератора;
Кг -коэффициент передачи редуктора Р; и -номинальное напряжение двигателя; и„ и /г Д8 - его номинальная скорость; /„ - его номинальный ток;
/- -суммарное активное сопротивление главной цепи;
S - статизм системы.
Как показывает эта формула, .при сохранении статизма S системы постоянным по величине во всем диапазоне изменения скорости исполнительного двигателя (что важно для станочного привода) зависимость коэффициента усиления К ..у от заданной скорости исполнительного двигателя нелинейна. Уменьщение коэффициента усиления системы по мере увеличения скорости исполнительного двигателя при прочих равных условиях значительно облегчает задачу стабилизации привода по сравнению с приводом, в котором коэффициент усиления промежуточного усилительного устройства поддерживается постоянным во всем диапазоне изменения скорости исполнительного двигателя.
Предмет изобретения
Электропривод для станков по авт. св. № 98785, отличающийся тем, что, с целью расщирения диапазона регулирования скорости, улучщения динамических и статических характеристик и упрощения схемы, электронное усилительное устройство выполнено с переменным коэффициентом усиления, уменьщающимся с увеличением уставки скорости электропривода.
-3-N 146835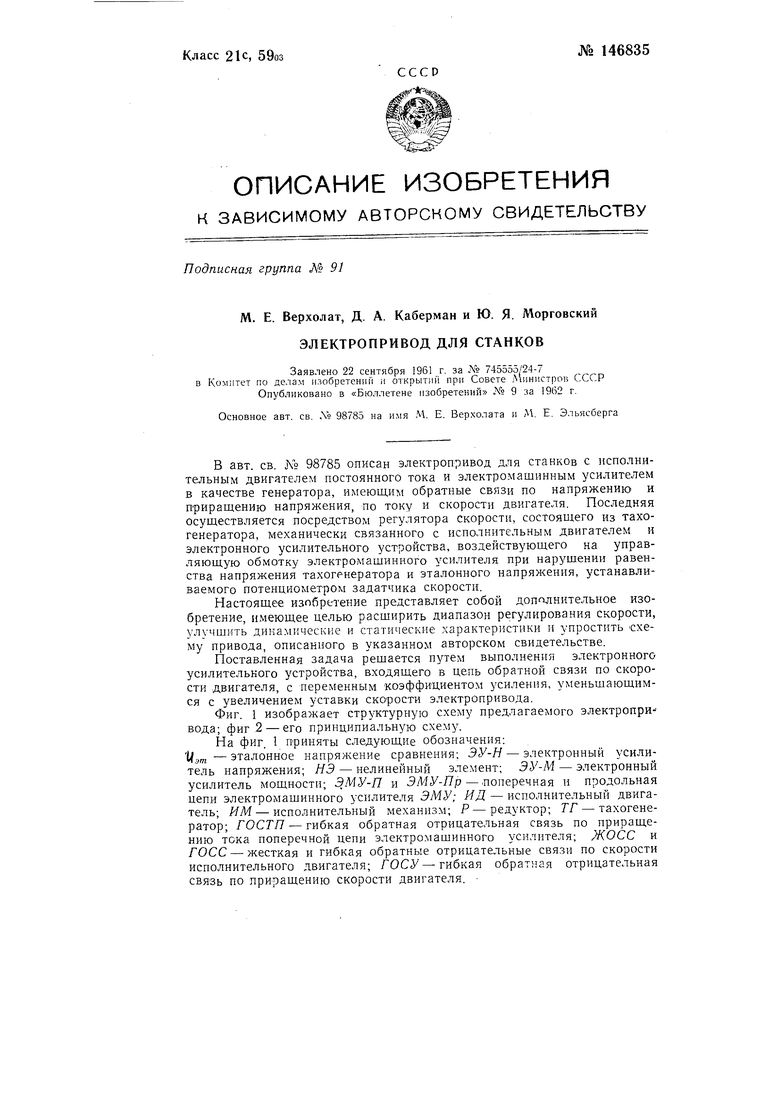
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод для станков | 1951 |
|
SU98785A1 |
| Система программного управления металлорежущими станками | 1961 |
|
SU147421A1 |
| СХЕМА ОГРАНИЧЕНИЯ ВЕЛИЧИНЫ ДИНАМИЧЕСКОЙ ОШИБКИ КОНИРОВАНИЯ | 1968 |
|
SU219992A1 |
| Электрический привод машин-орудий | 1948 |
|
SU76719A1 |
| Устройство для температурной стабилизации узла токовой отсечки в приводе по системе Г-Д | 1959 |
|
SU133103A1 |
| Электропривод ленточной машины | 1961 |
|
SU145922A1 |
| Бесконтактное устройство для автоматического управления электроприводом постоянного тока | 1960 |
|
SU134755A1 |
| Усилительное устройство | 1959 |
|
SU148836A1 |
| Электропривод | 1951 |
|
SU98104A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОПЕРЕЧНОЙ ПОДАЧЕЙ НАЖИМНОГО РОЛИКА ТРУБОГИБОЧНОГО СТАНКА | 1970 |
|
SU271267A1 |