1
Предлагаемая система относится к области автоматического управления металлорежущими станками и может быть шрименена во фрезерных, токарных, (карусельных станках.
Известна система автоматичеокого копирования замкнутого контура с простым копировальным прибором, имеющим один индуктивный датчик. Для автоматизации кодирования замкнутого контура сигнал индуктивного датчика подается на первичную обмотку синусо-косинусного вращающегося трансформатора, управляющего исполнительными приводами подачи, и одновременно на привод поворота ротора синусно-косинусного трансформатора. Питание прибора осуществляется однофазным напряжением.
Однако в динамических режимах, -например, при копировании внутренних углов с мальши радиусами эквидистанты, максимальный угол поворота вектора результирующей скорости на ее поминальной установке составляет лишь ± 45°. На скоростях меньше номинальной принципиально МОжет быть получен большой угол поворота с пределом 90° на минимальной установке, однако это достигается за счет значительното увеличения динамической ошибки и сопровождается увеличением заданной скорости коширования в несколько раз, что недопустимо. Это обуславливает применение системы для обрабопки только определенного типа
деталей и накладывает на систему ограничение по максимальной скорости и динамической точности копирования.
Целью изобретения является увеличение скорости и точности копирования.
Это достигается тем, что в систему дополнительно введен выпрямитель, через который выход индуктивного датчика и задатчик скорости копирования подключены ко входу модулятора, выход которого подключен ко второй обмотке вращающегося трансформатора.
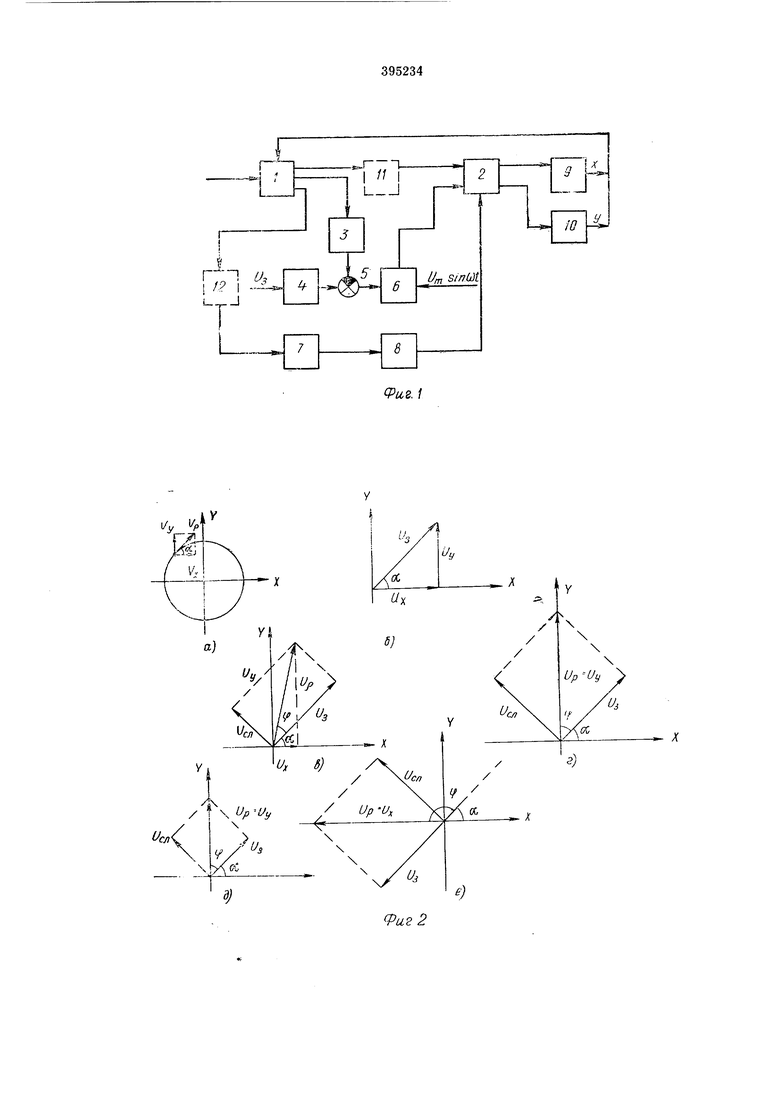
На фиг. 1 изображена блок-схема предлагаемой системы; на фиг. 2 - 1графическое пояснение принципа действия системы.
Следящая система состоит из копировального прибора (КП) / с одним индуктивным датчиком, синусно-косинусного вращающегося трансформатора (СКВТ) 2, выпрямителя 3, задатчика скорости 4, элемента сравнения 5, модулятора 6, управляемого двигателя 7, редуктора 8 между выходным валом двигателя и осью ротора вращающегося трансформатора, привода подач 9 ;по оси X и привода подач 10 по оси У. К задатчику скорости подается задающее напряжение Us постоянного тока.
Для согласованного вы.хода копировального прибора с управляемым двигателем и вращающимся трансформатором -могут быть установлены усилители мощности 11 и 12.
Система работает след}ющим образом.
Задатчиком скорости 4 копирования устанавливается требуемая скорость. При равенстве угла копирования углу поворота ротора СКВТ 2 относительно задающей статорной обмотки якорь копировального прибора находится на своей оси (т. е. ошибка копирования равна нулю, и на выходе КП 1 сигнал отсутствует, а скорости подач по осям и У определются величиной напряжения на задающей статорной обмотке СКВТ 2 и утлом поворота ротора СКВТ 2 относительно этой обмотки, т. е. соответственно величиной управляющих напряжений f/x и U (см. фиг. 26). При появлении ошибки копирования, т. е. отходе якоря КП 1 от среднего -положения, на выходе прибора появляется напряжение, пропорциональное величине отклонения Д, которое поступает через выпрямитель и элемент сравнения на модулятор 6 и па вторую статорную обмотку СКВТ 2. В результате сложения сИГналов задающего напряжения Us и пропорционального ошибке Д, результирующее напряжение на задающей обмотке СКВТ 2 уменьшается, а при еще больщей величине Д меняет фазу на 180 эл. град.
Одновременно сигнал, пропорциональный ощибке Д, подается на управляющую обмотку двигателя 7. Последний поворачивает ротор СКВТ 2 в таком направлении, что результирующая скорость обеснечивает уменьшение ошИбки слежения Д. Прп достаточном коэффициенте усиления усилителя 12 и отсутствии зоны нечувствительности в усилителе и у двигателя 7 на плавном контуре ошибка слежения теоретически может быть снижена до нуля. Дви гатель 7 является интегратором ошибки слежения Д.
Таким образом, в рассматриваемой копировальной системе слежение по пути осуществляется iHO двум каналам: по каналу прямого слежения через усилитель // и по капалу иитегральнаго слежения через усилитель 12 и двигатель 7. Следящая система но интегральному каналу имеет астатрш-м второго порядка по пути, что на порядок выше, чем по прямому. Благодаря этому, в статических режимах (копирование плавных контуров) ощибка слежения Д мала. Однако быстродействие следящей системы по интегральному каналу значительно хуже, чем по нрямому. Поэтому управление копированием в динамических режимах (копирование внутренних углов) осуществляется, в основном, по прямому каналу. При этом необходимый поворот вектора результирующей скорости 1/р достигается за счет появления следяшей составляющей скорости Уел значительной величины, пропорциональной ошибке Д. Во время и после окончания переходного процесса двигатель 7 поворачивает СКВТ 2 и устраняет ощибку Д.
На фиг. 2 приведены диаграммы управляющих нанряжений f/x напряжений на задающей статорной Обмотке (Уз и следящей обмотке 6сл, результирующего вектора t/p и угла обмена ф, результирующего вектора скорости подачи при появлении ошибки (например, нри врезании в деталь) для предлагаемого устройства (см. фиг. 2, г, е,) и известного устройства (см. фиг. 2, 3, д.), на которых видно, что угол обмена ф для предлагаемого устройства на максимальной скорости копирования составляет ± 135°, а для известного устройства только лишь ± 45.
Предмет изобретения
Следящая система для автоматического копирования, выполненная в виде вращающегося трансформатора, ко входам которого подсоединены соответственно выход копировального прибора с одним индуктивным датчиком, управляемый от копировального прибора двигатель и через модулятор задатчик скорости, отличающаяся тем, что, с целью увеличения скорости н точности копирования, в систему дополнительно введен выпрямитель, через который выход индуктивного датчика и задатчик скорости копирования подключены ко входу .модулятора, выход которого подключен ко второй обмотке вращающегося трансформатора.
Г 1
L
li -&
Ч
L.
io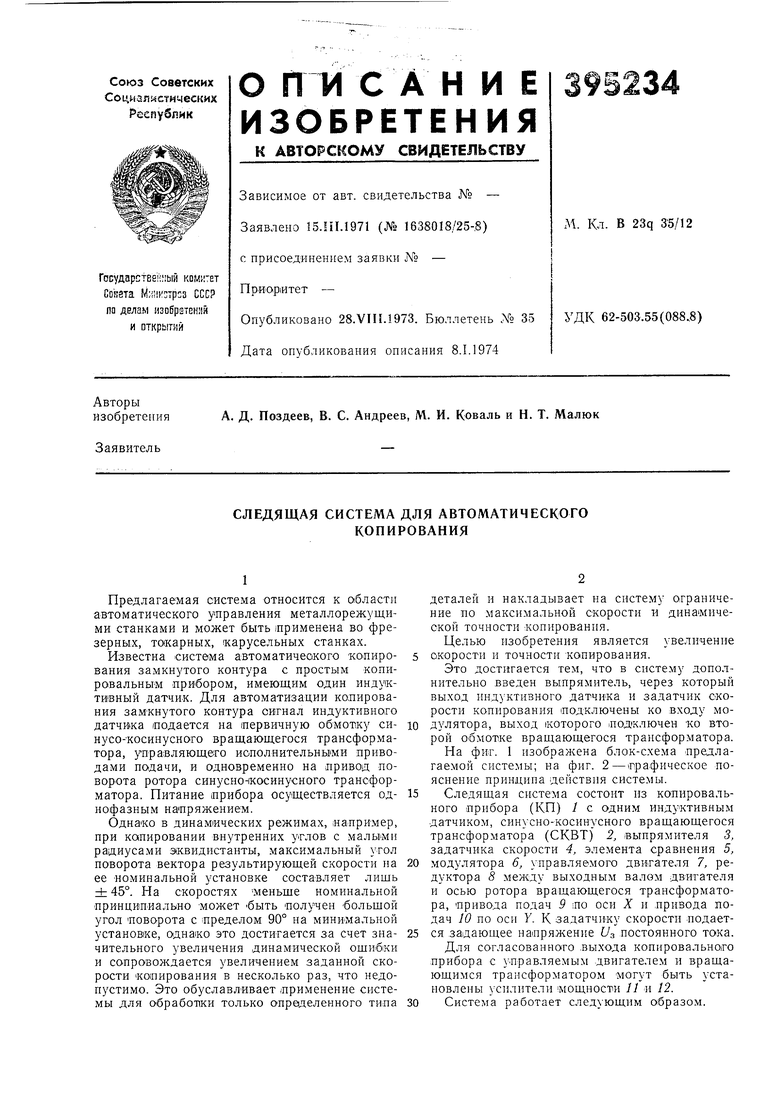
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система для автоматического копирования | 1976 |
|
SU603564A2 |
| Электромеханическая двухкоординатная следящая система для автоматического копирования контуров произвольной формы | 1954 |
|
SU110990A1 |
| СИСТЕМА УПРАВЛЕНИЯ КОПИРОВАЛЬНЫМ СТАНКОМ | 1973 |
|
SU377727A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1277308A1 |
| Электропривод | 1979 |
|
SU864476A1 |
| Прибор для измерения азимута скважин | 1977 |
|
SU652320A1 |
| Способ управления вентильным двигателем и следящая система для его осуществления | 2017 |
|
RU2656354C1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |