(54) УСТРОЙСТВО УПРАВЛЕНИЯ ВЕСОВЫМ ПОРЦИОННЫМ ДОЗАТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления весовым порционным дозатором | 1981 |
|
SU1008625A1 |
| Система для дозирования | 1978 |
|
SU717554A1 |
| Устройство управления весовым порционным дозатором | 1984 |
|
SU1191746A2 |
| Устройство для управления весовым порционным дозатором | 1976 |
|
SU602789A1 |
| Устройство для контроля видеосигнала | 1982 |
|
SU1069190A1 |
| Устройство для управления многокомпонентным дозатором | 1977 |
|
SU693345A1 |
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2005 |
|
RU2288452C1 |
| Устройство для управления весовым порционным дозатором | 1989 |
|
SU1795423A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Устройство управления весовым порционным дозатором | 1982 |
|
SU1035427A2 |
Изобретение относится к области весоизмерительной техники, в частнос ти к устройствам управления процессами дозирования материалов, например компонентов бетонной смеси.Известно устройство управления ве совым порционным дозатором, содержащее датчик веса, задатчик порции, формирователи остроконечных и широтных импульсов, связанные через элементы совпадения с триггером дозыЩ Известное устройство не обеспечивает высокую точность дозирования, так как в нем не устранены колебания составляющей выходного сигнала вёсОв при наборе порции материала. Ближайшим по технической сущности является устройство управления весовым порционным дозатором, содержащее датчик веса, подключенный к формирователям остроконечных и прямоугольных импульсов по текущему весу, соединенным с первыми входами элементов сравнения, вторые входы которых связаны с формирователями остроконечных и прямоугольных опорных импульсов , а выходы соединены с триггером дозы, задатчик порции с индикатором, источник питания и индикатор текущего веса 23 . Это устройство не обеспечивает требуемую точность дозирования, поскольку в нем производится только коррекция фазы напряжения выходного сигнала сельсина-датчика по измеренным значениям скорости и ускорения процесса дозирования. Тем самым решается лишь задача формирования сигНсша упреждения и не решается задача предотвращения колебаний выходного сигнала весов, а также учета запаздываний в системе, вызываемых массой компонента в свободно падающем столбе и пропорциональных высоте стодба. Необходимость предотвращения колебаний выходного сигнала весов вызывается тем, что колебательная составляющая сигнала является помехой, которая вызывает ложные срабатывания устройств автоматического управления, ложные показания индикаторов веса, отрицательно влияет на психологию операторов, вызывает повышенный износ оборудования за счет дополнительных переключений. Кроме того,колебательная составляющая сигнала снижает точность отвешивания заданной массы компонента и надежность Функционирования всей системы, особенно при многостадийном отвешивании, компонента порциями от значения грубого веса до точного весач
Целью изобретения является повышение точности дозирования.
Поставленная цель достигается тем что в устройство введены преобразователь последовательности прямоугольны импульсов в цифровой код, два регистра памяти, вычислители скорости и ускорения, два цифроаналоговых преоб-: разователя, интегрирующая цепь, инвертор, сумматор и компаратор напряжений, причем вход преобразователя последовательности прямоугольных импульсов в цифровой код подключен к триггеру дозы, выход - к вычислителю скорости и одному из регистров памяти, выход которого .через первый цифроаналоговыЯ: преобразователь и интегрирующую цепь соединен с первым входом компаратора напряжений, а выход вычислителя скорости связан с другим регистром памяти и с вычислителем ускорения, выход которого соединен со входами обоих регистров памяти, выход второго из которых через второй .цифроаналоговый преобразователь и инвертор соединен с входом сумматора, другой вход которого связан с задаТчиком порции, а выход подключен ко второму входу компаратора напряжений, выход которого соединен с блоком управления, при зтом выход формирователя остроконечных импуль,сов по текущей массе подключен к- входам вычислителей скорости и .ускорения.
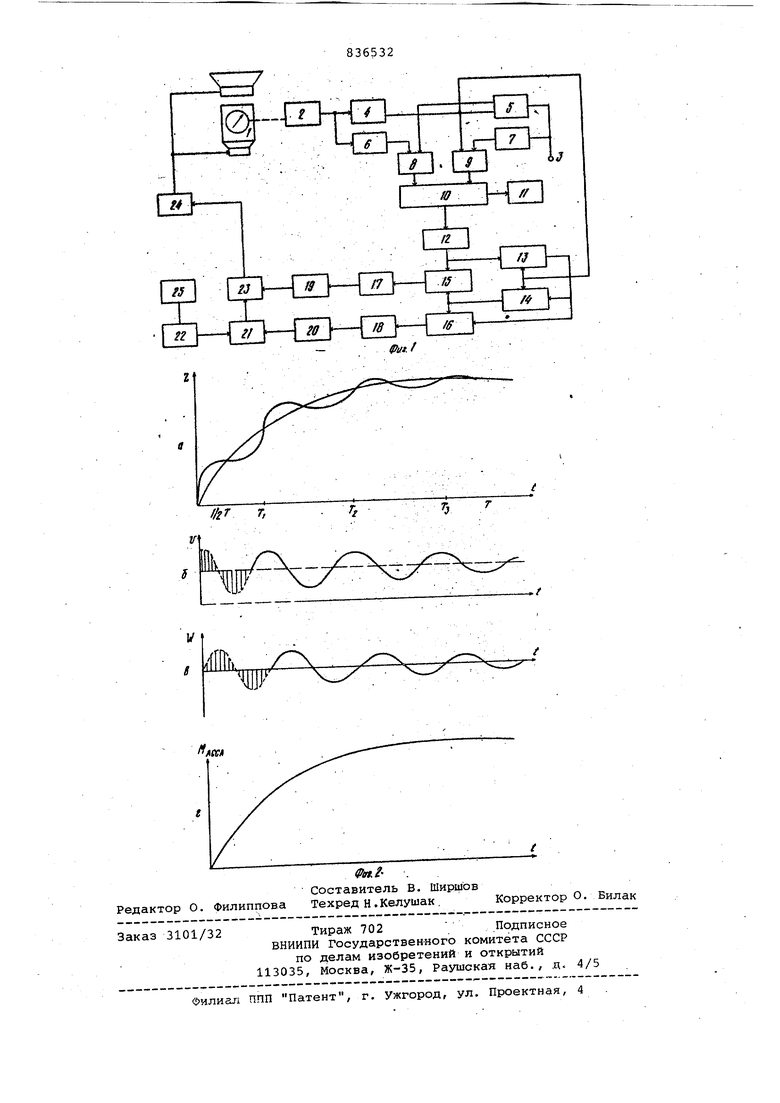
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - график изменения состояния дозатора в процессе набора порции.
Устройство содержит дозатор 1, ось стрелки индикатора дозы которого связана с ротором сельсина-датчика 2 источник опорного питания 3, формирователи 4 и 5 остроконечных импульсов и формирователи б и 7 прямоугольных импульсов, связанные через элементы совпадения 8 и 9 с RS-триггером 10 дозы,, индикатор 11 текущей массы, преобразователь 12 последовательности прямоугольных импульсов в цифровой код, вычислитель скорости 13.и вычислитель ускорения 14, первый и второй регистры памяти 15 и 16, цифроаналоговые преобразователи (ЦАП) 1 и 18 интегрирующую цепь 19, инвертор 20, сумматор 21, задатчик пор- ; ций 22, компаратор напряжений 23, блок управления 24 и индикатор 25 задания дозы.
Устройство работает следующим образом.
Угловое положение стрелки индикатора дозы 1 преобразуется сельсиномдатчиком 2 в напряжение, фаза котоpipro пропорциональна углу поворота стрелочного указателя дозатора 1,
Сельсин-датчик 2 работает в режиме многофазного индукционного фазовращателя.
Формирователь 4 образует последовательность остроконечных импульсов с фазовым сдвигом, определяемым фанзой напряжения однофазной Обмотки сельсина датчика 2 Относительно фазы источника опорного питания 3.
Формирователь 5 образует последовательность остроконечных опорных импульсов с периодом следования, задаваемым источником опорного питания 3.
Синхронно с остроконечными импульсами формирователи 6 и 7 вьщают блокировочные импульсы по весу и опорны соответственно, которые управляют элементами совпадения 8 и 9. Сигналы элементов совпадения 8 и 9 подаются на входы RS-триггера 10, который формирует последовательность прямоугольных импульсов с длительностью, пропоциональной текущему значению отвешиваемой массы. Прямоугольные импульсы поступают на индикатор 11 текущих значений массы и в преобразователь 12 импульсов в цифровой двоичнодесятичный код.
В вычислителе 13 производится непрерывное вычисление в коде скорости процесса, например, с дискретностью 20 мс, в вычислителе 14 - вычисление ускорения процесса с той же дискретностью.
Оба эти вычислителя имеют одинаковое конструктивное исполнение и содержат, например, приемный регистр текущего значения входного сигнала, выраженного в цифровом коде, регистр предыдущего значения входного сигнала, устройство вычитания кодов, реализЬванное на сумматорах и схемах равнозначности (на чертеже не показаны) .
Вычислители 13 и 14 производят вычисление скорости V(t) и ускорения W(t) процесса Z(t) через каждые 20 м (фиг. 2 а,б,в). Из кривых графика следует, что при переходе процесса Z(t) через среднее значение имеет место экстремум скорости V(t) и нуль ускорения W(t), Следовательно, орДинаты ZT, соответствующие экстремумам скорости (нулю ускорений), могут служить оценкой массы компонента, поступившей в дозатор. Для получения информации о .ZT значения сигнала сельсина-датчика 2 и скорости процесса в цифровом коде записываются в регистры памяти 15 и 16 по комадам вычислителя 14 в моменты времени, соответствующие нулевым значениям ускорения пр оцесса. Таким образом., регистры 15 и 16 хранят информацию об Ординате If и экстремальном значении скорости дозирования в течение времени, равном полупериоду колебаний процесса Z(t) и составляющем в среднем 0,5 с. Затем, в следующем полупериоде, информация обновляется и т.д.
Для целей управления дозированием информация о массе и скорости процесса, получаемая с выходов регистров памяти 15 и 16 в цифровом коде, восстанавливается, для восстановления кодовых сигналов массы служат ЦАП 17 и интегрирующая цепь 19, а для восстановления кодового сигнала скорости - ЦАП 18, Интегрирование ступенчатого сигнала ЦАП 17 производится для обеспечения лучших динамических качеств восстановления, особенно проявляющихся при 6ОЛЫ1ЮМ периоде восстановления, равном 0,5 с. Кривая восстановленного сигнала текущих значений массы показана на фиг. 2,г.
Напряжение с цап 18 в форме ступенчато-экстраполированного сигнала через инвертор 20 подается на сумматор 21, последний связан также с задатчиком порций 22. В результате с выхода сумматора 21 поступает аналоговый сигнал управления, откорректированный по динамике процесса (скорости) и по высоте свободно пгщающего столба дозируемого компонента (по запаздыванию в системе).
Выходные сигналы.интегрирующей цепи 19 и сумматора 21 сравниваются по уровням в компараторе напряжений и при их совпадении компаратор
23выдает сигнал на блок управления
24об окончании процесса дозирования Задание желаемого значения дозы
контролируется по приборному индикатору 25.
Описанное устройство обеспечивает предотвращение колебаний нестационарного выходного сигнала весов за счет обработки сигнала по следующему алгоритму: аналого-цифрового преобразования сигнала сельсина-Датчика; определения моментов времени, в которые имеют место экстремальные значения скорости и ускорения процесса дозирования; определения дискретных значе. НИИ выходного сигнала сельсина-датчика, соответ ствующих наиболее достоверным оценкам отвешиваемой массы; восстановление оценок массы и скорости для целей управления и динамической коррекции по скорости дозирования и запаздыванию.
Предотвращение колебаний выходного сигнала весов позволяет осуществить устойчивое одностадийное отвешива:ние компонентов дозаторами порционного действия с высокой точностью.
; Формула изобретения
Устройство управления весовым порционным дозатором, содержащее датчик веса, подключенный к формирователям остроконечных и прямоугольных импульсов по текущему весу, соединенным с первыми входами элементов сравнения, вторые входы которых связаны с формирователями остроконечных и прямоугольных опорных импульсов, а выходы соединены с триггером дозы, заSдатчик порции с индикатором, источник питания и индикатор текущего веса, .отличающееся тем, что, с целью повышения точности дозирования, в него введены преобразо0ватель последовательности прямоугольных импульсов в цифровой код, два регистра памяти, вычислители скорости и ускорения, два цифроаналоговых преобразователя,интегрирующая цепь, инвертор, сумматор и компаратор на5пряжений, причем вход преобразователя последовательности прямоугольных . импульсов в цифровой .код подклю teH к триггеру дозы, выход - к вычислителю скорости и одному из ре0гистров памяти, выход которого через первый цифроаналоговый преобразователь и интегрирующую цепь соединен с первым входом компаратора напряжений, а выход вычислителя скорости
5 связан с другим регистром памяти и с вычислителем ускорения, выход которого соединен со входами обоих регистров памяти, выход второго из которых через второй цифроаналоговый
0 преобразователь и инвертор соединен с входом сумматора, другой вход которого связан с задатчиком порции, а: выход подключен ко второму входу компаратора напряжений, выход которого соединен с блоком управления,
Источники информации,
0 принятые во внимание приэкспертизе
5 (прототип).
