В процессе строительства большое значение приобретает наличие такого способа нивелирования точек рельефа местности, который давал бы возможность получить исковые точки автоматически или механически.
Примером механического нивелирования является автомат системы Дрзбышева, но он не пригоден для работы в непроезжих местностях.
Предлагаемый способ основан на применении обычного оптического прибора, позволяюи1его осуществить автоматическое получение искомых точек с помощью схем, изображенных на фиг. 1, 2 и 3.
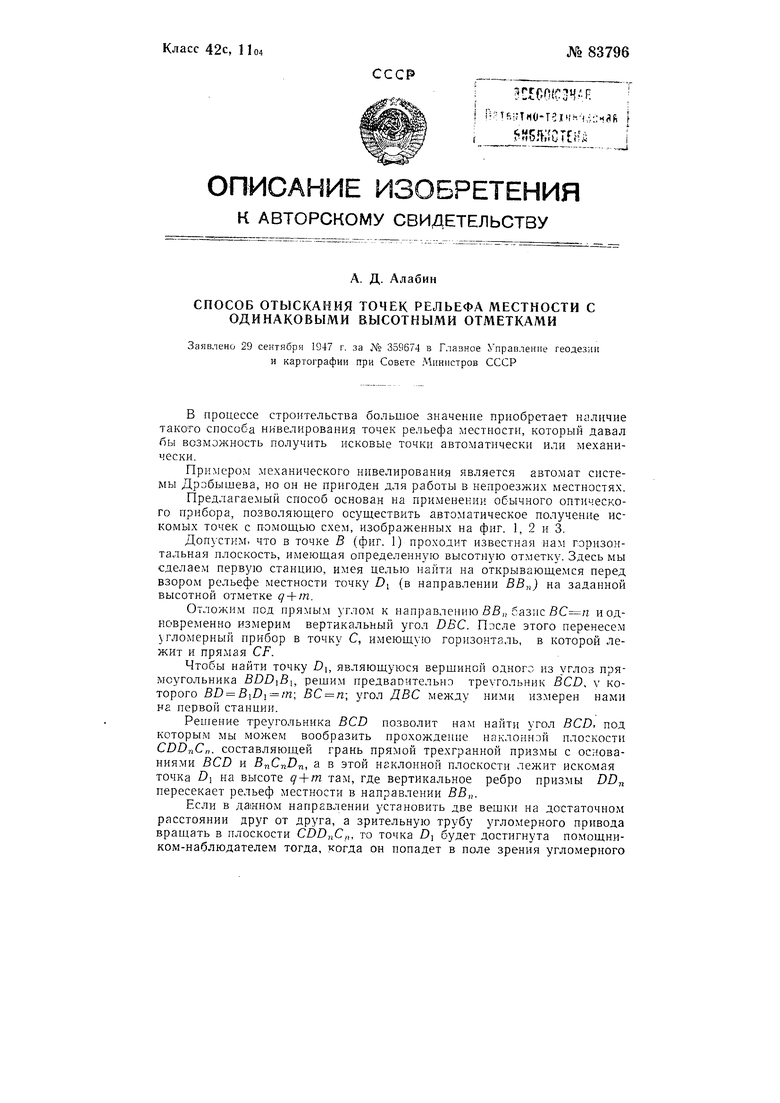
Допустим, что в точке В (фиг. 1) проходит известная нам горизонтальная плоскость, имеющая определенную высотную отметку. Здесь мы сделаем первую станцию, имея целью найти на открывающемся перед взором рельефе местности точку DI (в направлении ВВ„) на заданной высотной отметке .
Отложим под прямы.м углом к направлению fiB,j базис и одновременно измерим вертикальный угол ОБС. Пэсле этого перенесем угломерный прибор в точку С, имеющую горизонталь, в которой лежит и пря.мая CF.
Чтобы найти точку D, являющуюся вершиной одного из углов прямоугольника , решим предваоительнэ треугольник BCD, v которого BD ВС п; угол ДВС между ними измерен нами нг первой станции.
Реп1епие треугольника BCD позволит нам найти угол BCD, под которым мы можем вообразить прохождение наклонной плоскости CDDnCn. составляющей грань прямой трехгранной иризмы с основаниями BCD и BnCnDn, а в этой наклонной плоскости лежит искомая точка DI на высоте q + m там, где вертикальное ребро приз.мы DD,, пересекает рельеф местности в направлении 5В„.
Если в данном направлении установить две вешки на достаточном расстоянии друг от друга, а зрительную трубу угломерного привода вращать в плоскости CDDnCn, то точка Dj будет достигнута помощником-наблюдателем тогда, когда он попадет в поле зрения угломерного
№ 83796- 2 прибора. Здесь он может быть остановлен посредством сигнала со станции для установки репера с отметкой q + т.
Если рельеф волнистый и мы хотим найти в направлении ВВ„ другие точки, имеющие одинаковую высоту, то для этого следует лишь продолжить путешествие нашего помошника-наблюдателя в том же направлении до тех пор, пока за дальностью расстояния он не скроется из глаз; все эти точки он пройдет и покажет появлением в зрительной трубе прибора.
Если же мы хотим подвергнуть разбивку более крупного рельефа на равныг высотные промежутки в целях сечения его горизонталями на высотах D, D, „, то для этого должен быть изменен угол плоскости вращения оптической трубы после решения треугольников BCf), BCD и т. д. с двумя данными прежними и с тремя данными, равными, последовательно, 2т, 3т и т. д. по числам натурального ряда. Соответственно восхождению помощника мы должны изменять этот угол.
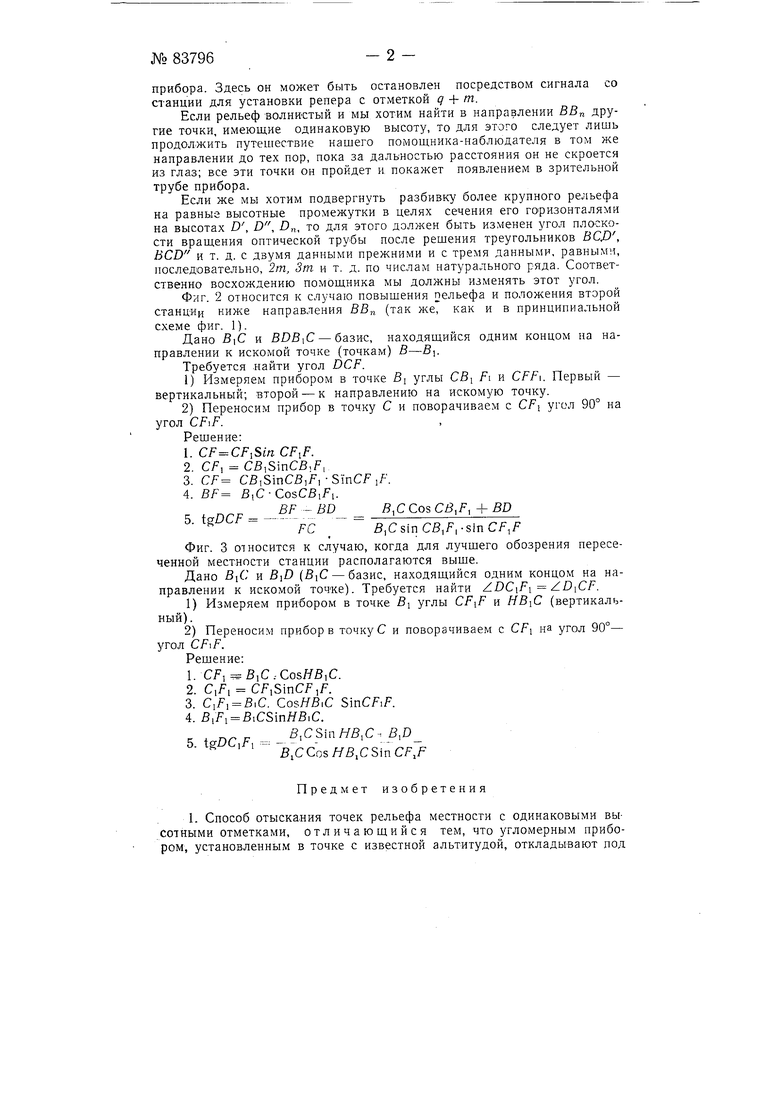
Фиг. 2 относится к случаю повышения пельефа и положения второй станции ниже направления ВВп (так же, как и в принципиальной схеме фиг. 1).
Дано и - базис, находящийся одним концом на направлении к искомой точке (точкам) В-S.
Требуется .найти угол DCF.
1)Измеряем прибором в точке Sj углы СВ; Fi и CFFi. Первый - вертикальный; второй - к направлению на искомую точку.
2)Переносим прибор в точку С и поворачиваем с CFi угол 90° на угол CFiF.
Решение:
1.,SinCF,F.
2.Cf, CS,SinCB,F,
3.CF CS,SinCS,f,-STnCf ,f.
4.BF B,C-CosCB,fi.
, .„ BF - BD B,CCosCB,F,+BD t.
FC 5,CsinCe,f|-sinC/i/
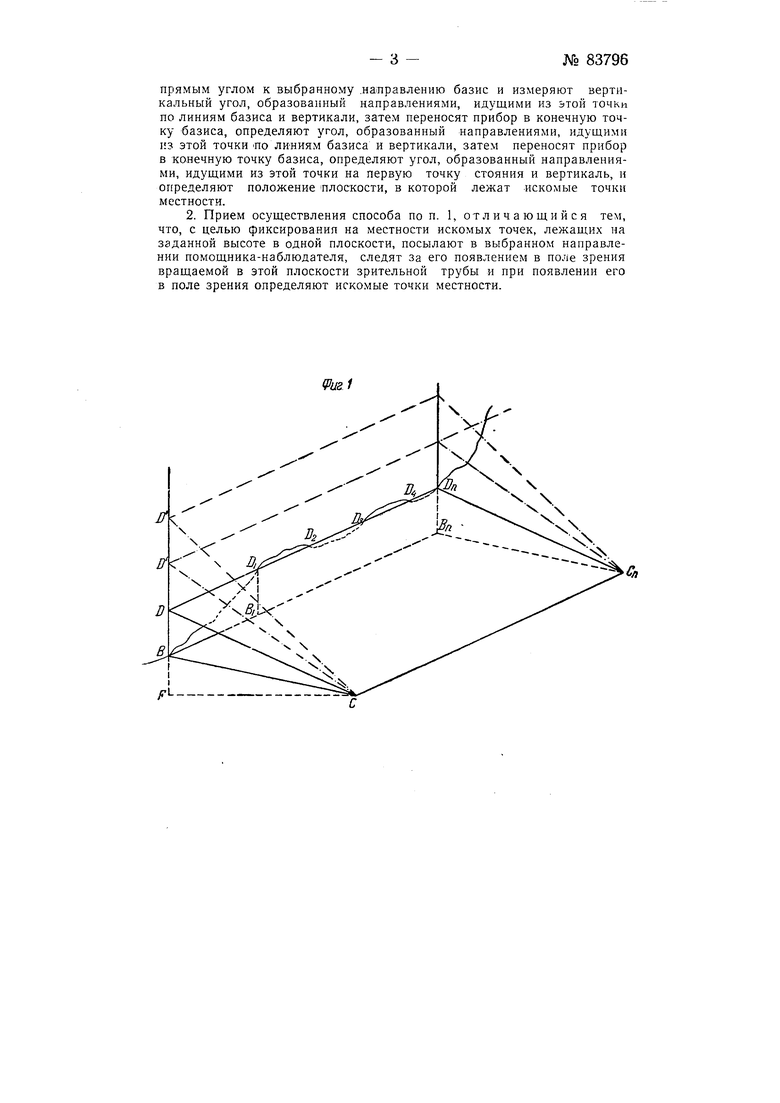
Фиг. 3 относится к случаю, когда для лучшего обозрения пересеченной местности станции располагаются выше.
Дано BiC и BiD ( - базис, находящийся одним концом на направлении к искомой точке). Требуется найти / DCiFi DiCF.
1)Измеряем прибором в точке Bj углы CFiF и (вертикальный) .
2)Переносим приборе точку С и поворачиваем с CFi на угол 90°- угол .
Решение:
1.Cf, В,С.-Со5ЯВ,С.
2.Cifi CfiSinCf ,f.
3.Cif, S,C. Со5ЯВ|С SinCfiF.
4.BiFi BiCSinHB,C.
5 tgDC,f,,CCr,sHB,,F
Предмет изобретения
1. Способ отыскания точек рельефа местности с одинаковыми высотными отметками, отличающийся тем, что угломерным прибором, установленным в точке с известной альтитудой, откладывают под
прямым углом к выбранному .направлению базис и измеряют вертикальный угол, образованный направлениями, идущими из этой точки по линиям базиса и вертикали, затем переносят прибор в конечную точку базиса, определяют угол, образованный направлениями, идущими из этой точкиПО линиям базиса и вертикали, затем переносят прибор в конечную точку базиса, определяют угол, образованный направлениями, идущими из этой точки на первую точку стояния и вертикаль, и определяют положение плоскости, в которой лежат искомые точки местности.
2. Прием осуществления способа по п. 1, отличающийся тем, что, с целью фиксирования на местности искомых точек, лежащих на заданной высоте в одной плоскости, посылают в выбранном направлении помощника-наблюдателя, следят за его появлением в поле зрения вращаемой в этой плоскости зрительной трубы и при появлении его в поле зрения определяют искомые точки местности.