Изобретение относится к измерительной технике и может быть использовано в геодезии при определении координат и высот пунктов геодезических сетей, точек местности и различных объектов, а также дирекционных углов сторон геодезических сетей и направлений на ориентирные пункты или местные предметы.
Известен способ определения координат геодезических пунктов и дирекционных углов направлений полигонометрическим ходом [1]. Реализация способа предусматривает составление проекта, рекогносцировку, закрепление пунктов центрами и наружными знаками, измерение длин линий и углов поворота хода, обработку данных. К основным недостаткам способа [1] следует отнести накопление погрешностей измерений пропорционально  (где n - число поворотных точек хода) и трудоемкость точных линейных измерений.
(где n - число поворотных точек хода) и трудоемкость точных линейных измерений.
Известны также способы [2, 3], реализация которых предусматривает определение координат, высот и углового положения контролируемых точек с использованием базовых станции GPS.
К общим недостаткам способов [2, 3] следует отнести зависимость точности определения координат и высот контролируемых точек от пространственной стабильности базовых станций GPS, принимаемых в качестве опорных пунктов, их помехоустойчивости, высокую стоимость оборудования и программного обеспечения.
Наиболее близким по существу и достигаемому техническому результату является комбинированный способ [4], предусматривающий сгущение пунктов государственной геодезической сети (ГТС) способом триангуляции с последующим определением по этим пунктам координат опорных пунктов засечками или полярным способом, а определение положения опорных пунктов по высоте способом тригонометрического нивелирования.
Способ триангуляции применяется преимущественно на открытой местности и создается в виде сплошных сетей или цепи треугольников. После постройки наружных знаков и закладки центров пунктов сгущения приступают к измерениям углов в треугольниках. При камеральной обработке углы уравнивают по условиям фигур, затем последовательно вычисляют координаты пунктов сгущения по координатам двух исходных или предшествующих пунктов по формулам котангенсов уравненных дирекционных углов сторон треугольников. Высоты центров пунктов находят способом тригонометрического нивелирования.
Способ триангуляции обладает наибольшей точностью, но требует продолжительных затрат времени (несколько суток), тогда как на определение координат опорного пункта по пунктам сгущения угловыми (линейными) засечками или полярным способом затрачивается несколько часов, что несопоставимо с продолжительностью предшествующих работ по созданию сети сгущения.
Задачей заявленного изобретения является упрощение технической реализации и повышение оперативности определения координат, высот и дирекционных углов направлений.
Реализация указанного подхода достигается тем, что используют беспилотные летательные аппараты (БЛА) вертолетного типа и принимают фиксируемое ими положение в воздушном пространстве в качестве пунктов геодезической сети сгущения на земной поверхности. В отличие от пунктов геодезической сети сгущения, закрепляемых на земной поверхности, видимость на БЛА не зависит от рельефа местности, наличия растительности, зданий и сооружений. Поэтому, при существующей плотности пунктов ГГС (один пункт на 35-50 км), требуемое количество пунктов сгущения можно сократить до нескольких БЛА и определять их положение непосредственно с исходных пунктов по предлагаемому способу. В целях оперативности выполнения измерений (без вскрытия центров исходных пунктов, выполнения наблюдений без центрировки угломерных приборов с произвольных точек местности) предлагается ориентирование сторон фигур воздушных построений выполнять на основе косвенных способов определения ориентирующего угла [5].
Изобретение поясняется описанием конкретного, но не ограничивающего существа вариантом его выполнения и прилагаемыми чертежами.
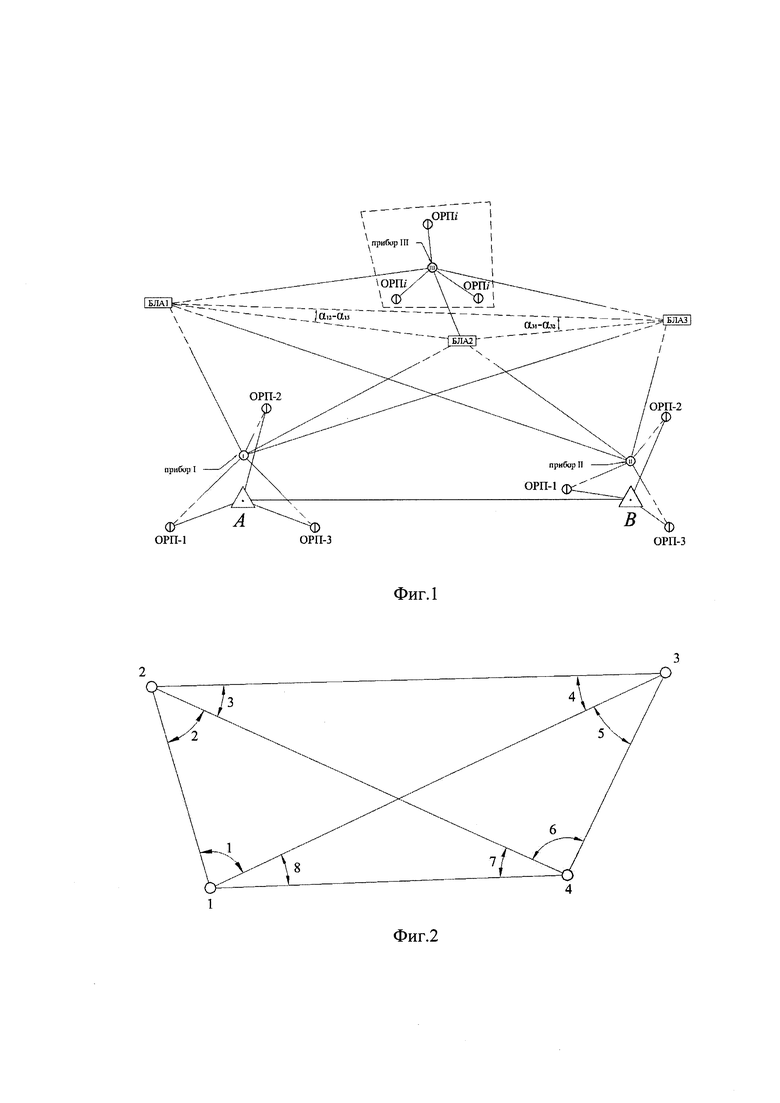
На фиг. 1 представлен вариант размещения угломерных приборов - электронных тахеометров в исходном районе и в районе создаваемой геодезической сети. На фиг. 2 изображены углы геометрических построений, используемые при передаче ориентирования к направлению определяемой стороны.
Отличительные признаки заявленного способа являются существенными, их реализация наряду с измерениями, выполняемыми по прототипу, позволяет совместно определять координаты, высоты и дирекционные углы направлений, при этом достигается технический результат, состоящий в снижении трудозатрат (отсутствует необходимость выполнения работ по проектированию геодезической сети сгущения, рекогносцировке, строительству наружных знаков и центров пунктов триангуляции, многократных измерений и уравнительных вычислений), а также в повышении оперативности геодезических работ (от нескольких месяцев до нескольких часов) за счет использования БЛА, фиксируемым в воздушном пространстве и выполняющим функции пунктов геодезической сети сгущения на земной поверхности, осуществлению синхронных измерений на них и выполнению геодезических построений по ориентирующим углам угломерных приборов.
Указанный технический результат достигается тем, что в районе выполнения работ заблаговременно создают ориентирные сети в виде треугольников, которые закрепляют на местности ориентирными пунктами (ОРП) на некотором удалении от центров исходных пунктов А и В. Устанавливают угломерные приборы I и II над центрами исходных пунктов А и В, измеряют направления и расстояния до визирных марок ОРП в целях получения исходных данных ориентирной сети (координат и высот визирных марок ОРП, расстояний до ОРП и дирекционных углов направлений с центров пунктов на ОРП).
Для определения координат, высот и дирекционных углов направлений угломерные приборы I и II устанавливают на штативах со смещением относительно центров исходных пунктов А и В в местах, обеспечивающих наблюдение БЛА в заданных секторах, измеряют превышения, направления и расстояния до ОРП. Устанавливают угломерный прибор III на штативе в центральной части создаваемой геодезической сети в точке, с которой видны стационарные визирные марки ОРП. Выводят БЛА в первую точку (БЛА 1) на высоту, обеспечивающую его видимость с исходных пунктов и создаваемой геодезической сети. Измеряют синхронно тремя угломерными приборами горизонтальные и вертикальные направления на БЛА. Перемещают БЛА в последующие положения в воздушном пространстве (БЛА 2 и БЛА 3) и выполняют аналогичные измерения. Угломерным прибором III измеряют направления и расстояния до стационарных визирных марок ОРП создаваемой геодезической сети. Выполняют математическую обработку измерений в целях определения координат БЛА способом прямой засечки по координатам угломерных приборов на исходных пунктах и их ориентирующим углам, высот БЛА способом тригонометрического нивелирования по высотам угломерных приборов, дирекционных углов направлений воздушных линий по ориентирующим углам угломерных приборов и измеряемым направлениям, а также вычисления координат и высот ОРП создаваемой геодезической сети по определяемым значениям ориентирующего угла, координат и высоты угломерного прибора III в следующей последовательности:
1. Вычисляют значения ориентирующего угла α0 для угломерного прибора I и угломерного прибора II по направлениям на ОРП [6]

где k1=D1sin(N3-N2); k2=D2sin(N1-N3), k3=D3sin(N2-N1);
αi - дирекционный угол направления с центра пункта на ОРПi (i=1, 2, 3);
Ni - направление, измеряемое угломерным прибором на ОРПi (i=1, 2, 3);
Di - горизонтальное расстояние с центра пункта до ОРПi (i=1, 2, 3).
2. Вычисляют координаты угломерных приборов I и II, затем по их значениям координаты БЛА по формулам котангенсов дирекционных углов [4]
где Р - определяемая точка (угломерный прибор, БЛА); х1, у1 – координаты ОРП-1 при определении координат угломерного прибора I (координаты угломерного прибора I при определении координат БЛА); х2, y2 - координаты ОРП-2 при определении координат угломерного прибора II (координаты угломерного прибора II при определении координат БЛА); αi - дирекционный угол направления от угломерного прибора I (II) на ОРП (БЛА); Ni - направление, измеряемое угломерным прибором I (II) на БЛА.
3. Вычисляют дирекционные углы направлений воздушных линий, фиксируемых положением БЛА (фиг. 2)

где

α23 - дирекционный угол стороны, фиксируемой положением БЛА в точках БЛА 2 и БЛА 3 (фиг. 2); N1(4)i - направление, измеряемое угломерным прибором I (II) на БЛАi (i=2, 3);  - значение ориентирующего угла угломерного прибора I (II); α1(4)i - дирекционный угол направления с точки 1 (4) на БЛАi; α14 - дирекционный угол направления исходной стороны (вычисляют по координатам угломерных приборов).
- значение ориентирующего угла угломерного прибора I (II); α1(4)i - дирекционный угол направления с точки 1 (4) на БЛАi; α14 - дирекционный угол направления исходной стороны (вычисляют по координатам угломерных приборов).
4. Вычисляют высоту БЛА [8]
где Нр - высота угломерного прибора; НОРП - высота стационарной визирной марки ОРП; hОРП - превышение стационарной визирной марки ОРП над угломерным прибором; Di - горизонтальное расстояние от угломерного прибора до БЛА; Vi - вертикальный угол на БЛА; K - коэффициент рефракции; R - средний радиус кривизны Земли (выбирают из геодезических таблиц по средней широте); xi, yi - координаты БЛА; хр, ур - координаты угломерного прибора.
5. Вычисляют ориентирующий угол угломерного прибора III, установленного в районе создаваемой геодезической сети (фиг. 1)

где k1=sin(α12-α13)sin(N1-N2); k3=sin(α31-α32)sin(N2-N3);
α21(α23) - дирекционный угол направления воздушной линии БЛА2-БЛА1 (БЛА2-БЛА3) стороны треугольника БЛА; Ni - направление, измеряемые угломерным прибором III на БЛА.
4. Вычисляют координаты и высоту угломерного прибора III по формулам (2) и (4) относительно координат и высот БЛА.
5. Вычисляют высоту и координаты стационарных визирных марок ОРП создаваемой геодезической сети по ориентирующему углу, высоте и координатам угломерного прибора III
где Нр, xP, ур - высота и координаты угломерного прибора, определяемые по БЛА; hi - превышение стационарной визирной марки над угломерным прибором; Di - расстояние от угломерного прибора до стационарной визирной марки ОРП;  - ориентирующий угол угломерного прибора III, определяемый по дирекционному углу направлений воздушных линий между БЛА; Ni - направление, измеряемое на ОРП.
- ориентирующий угол угломерного прибора III, определяемый по дирекционному углу направлений воздушных линий между БЛА; Ni - направление, измеряемое на ОРП.
6. Рассчитывают СКП определения координат по формуле [4]

где mα - СКП дирекционного угла направления на определяемую точку;
ω - угол засечки; DI, DII - расстояние от угломерного прибора I (II) до БЛА.
7. Рассчитывают значение СКП определения координат обратной засечкой по направлениям на БЛА по формуле [5]

где mN - СКП измерения направлений на БЛА; Di - горизонтальные расстояния от угломерно прибора до БЛА (i=1, 2, 3); Dii - горизонтальные расстояния между БЛА; Ni - измеряемое направление на БЛА; ρ=206265''.
Приведенный авторами анализ научно-технической литературы позволяет сделать вывод о патентной новизне предлагаемого способа совместного определения координат, высот и дирекционных углов направлений.
Источники информации, используемые для составления заявки:
1. Соловьев А.Ф., Тарасов П.Н., Тарасенко Ф.В., Федорченко И.Ф., Стотыка И.П. Учебное пособие. 4.1 / Под ред. А.Ф. Соловьева. МО, 1966-502 с.
2. Патент РФ №2668730. Способ получения, обработки, отображения и интерпретации геопространственных данных для геодезического мониторинга деформационного состояния инженерного объекта / А.П. Карпик, Г.Н. Ткачева - №2017138176. Заявлено 2017.11.01. - Опубликовано 2018.10.02. Бюл. №28.
3. Патент РФ №2681836. Способ определения пространственных координат и углового положения удаленного объекта / В.М. Безменов, B.C. Безменов, Н.Н. Гараев, К.И. Сафин - №2018105378. Заявлено 2018.02.13. - Опубликовано 2019.03.13. Бюл .№8
4. В.Д. Большаков, Г.П. Левчук, Г.В. Багратуни, К.В. Бажанов и др. Справочник геодезиста, (в двух книгах) / под редакцией В.Д. Большакова, Г.П. Левчука. - М: Недра, 1975. - 1056 с.
5. Козлов Н.А. Общая теория косвенных способов геодезического и астрономического ориентирования. - МО СССР, 1979. - 101 с.
6. Авторское свидетельство СССР №949338. Способ определения угла разворота лимба угломерного прибора / Н.А. Козлов - №2750651/18-10; Заявлено 09.04.79. - Опубликовано 07.08.82. Бюл. №29.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ прямой векторной засечки | 2020 |
|
RU2735311C1 |
| Способ определения координат точек объекта | 2020 |
|
RU2740686C1 |
| Способ передачи ориентирования | 2021 |
|
RU2761934C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ ВЫСОКОГО КЛАССА ТОЧНОСТИ | 2012 |
|
RU2500990C1 |
| СИСТЕМА ОРИЕНТИРОВАНИЯ МОБИЛЬНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ИЗВЕСТНОМУ ОРИЕНТИРНОМУ НАПРАВЛЕНИЮ | 2024 |
|
RU2838002C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2017 |
|
RU2662468C1 |
| Способ управления амплитудно-фазовым распределением на раскрыве фазированной антенной решетки | 2016 |
|
RU2644999C2 |
| СПОСОБ ГОРИЗОНТАЛЬНОЙ СОЕДИНИТЕЛЬНОЙ СЪЕМКИ ПОДЭТАЖНЫХ ГОРИЗОНТОВ | 2018 |
|
RU2677089C1 |
Изобретение относится к измерительной технике и может быть использовано при проведении геодезических работ. Сущность изобретения состоит в том, что в районе выполнения создают ориентирные сети в виде треугольников, закреплённых на местности ориентирными пунктами (ОРП). Затем устанавливают на штативах два угломерных прибора вне центров исходных пунктов, а третий прибор - внутри создаваемой сети. По измерениям на ОРП исходной сети определяют ориентирующие углы первого и второго приборов, их координаты и высоты. Далее выводят беспилотный летательный аппарат (БЛА) вертолетного типа последовательно в трех точках на высоту, при которой обеспечивается его видимость с пунктов исходной и создаваемой геодезической сети. Затем синхронно измеряют тремя приборами горизонтальные и вертикальные направления на БЛА; координаты БЛА рассчитывают способом прямой засечки, а высоту БЛА - тригонометрическим нивелированием. Вычисляют дирекционные углы направлений воздушных линий между положениями БЛА. По завершении измерений на БЛА дополнительно третьим прибором измеряют превышения, направления и расстояния до стационарных визирных знаков пунктов создаваемой сети. Технический результат заключается в снижении трудозатрат и повышении оперативности геодезических работ. 2 ил.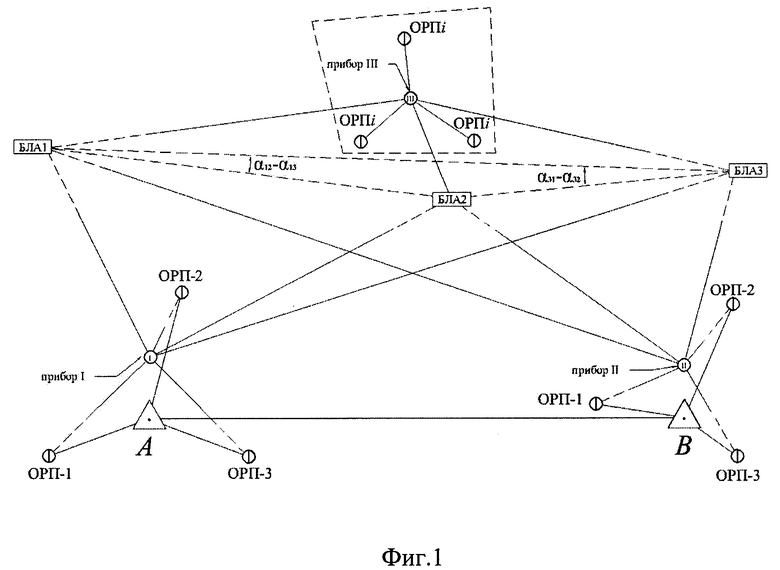
Способ совместного определения координат, высот и дирекционных углов направлений, включающий операции по установке угломерных приборов на исходных пунктах и выполнение линейных и угловых измерений, отличающийся тем, что используют беспилотные летательные аппараты (БЛА) вертолетного типа и принимают фиксируемое ими положение в воздушном пространстве в качестве пунктов геодезической сети сгущения на земной поверхности, устанавливают два угломерных прибора на штативах со смещением относительно центров исходных пунктов в местах, обеспечивающих наблюдение БЛА в заданных секторах, измеряют превышения, направления и расстояния до ориентирных пунктов (ОРП), устанавливают третий угломерный прибор на штативе в центральной части создаваемой геодезической сети в точке, с которой видны стационарные визирные марки ОРП, подлежащих к определению, выводят БЛА в первую точку на высоту, обеспечивающую его видимость с исходных пунктов и создаваемой геодезической сети, измеряют синхронно тремя угломерными приборами горизонтальные и вертикальные направления на БЛА, перемещают БЛА в последующие положения в воздушном пространстве и выполняют аналогичные измерения, третьим угломерным прибором измеряют направления и расстояния до стационарных визирных марок ОРП создаваемой геодезической сети, выполняют математическую обработку измерений в целях определения координат БЛА способом прямой засечки по координатам приборов на исходных пунктах и их ориентирующим углам, высот БЛА - способом тригонометрического нивелирования по высотам угломерных приборов, дирекционных углов направлений воздушных линий - по ориентирующим углам угломерных приборов и измеряемым направлениям и вычисления координат и высот ОРП создаваемой геодезической сети - по определяемым значениям ориентирующего угла, координат и высоты третьего угломерного прибора.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ДВУХ ДИРЕКЦИОННЫХ УГЛОВ И ОДНОГО УГЛА МЕСТА | 2015 |
|
RU2601494C1 |
| Способ определения координат точек объекта | 2020 |
|
RU2740686C1 |
| ДЕМПФЕРНЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ | 0 |
|
SU200352A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОЧЕК ГЕОДЕЗИЧЕСКИХ КООРДИНАТ С ПОМОЩЬЮ ЛАЗЕРНОГО УСТРОЙСТВА, УСТАНОВЛЕННОГО НА РОБОТИЗИРОВАННОМ КОПТЕРЕ С DGPS ПРИЁМНИКОМ | 2014 |
|
RU2572790C1 |
| US 11140326 B2, 05.10.2021 | |||
| US 20220090910 A1, 24.03.2022. | |||
