Изобретение относится к области геодезического приборостроения и может быть использовано при производстве измерений в стесненных условиях, в частности на строительных площадках, в условиях плотной застройки, при проведении маркшейдерских измерений в подземных горных выработках, в тоннелях и др. Целевое назначение устройства - обеспечение качественного выполнения измерительных работ без механического центрирования в фиксированной на местности (объекте) точке, затрудненного из-за условий производства измерений. Преимущественное использование изобретения - в электронных геодезических приборах, в частности в электронных тахеометрах, оснащенных оптико-электронными центрирами.
Известен способ внецентренного измерения горизонтального угла, который предусматривает установку измерительного прибора в вспомогательной точке, измерение вспомогательного горизонтального угла в этой точке, линейного и углового элементов центрирования (см., например, Лебедев Н.Н. Курс инженерной геодезии: Геодезические работы при проектировании и строительстве городов и тоннелей. - М.: Недра, 1970, с.132-134, рис.43).
При использовании данного способа необходимо механически измерять линейный элемент центрирования, что часто сопрягается с известными трудностями при работе в стесненных условиях, когда точки геодезического обоснования находятся выше почвы, на которой устанавливают измерительный прибор, а также в местах, недоступных для непосредственной установки в них измерительного прибора.
Известны устройства для измерения небольших расстояний, выполненные в виде жезлов, состоящих из инварного стержня со сферическими наконечниками в защитном корпусе. На концах стержня установлены опоры с закрепленными на них индикаторными насадками, выполняющими функции отсчетных механизмов для измерения определяемой длины (см., например, Ямбаев К.Х. Специальные геодезические приборы для инженерно-геодезических работ. - М.: Недра, 1990, с.121-126, рис.47, 48, 49).
Известны устройства для определения положения точки относительно оси объекта, выполненные в виде жезла, содержащего подвижный блок измерительного механизма, установленный на каретке, перемещаемой в искомую точку объекта. Положение подвижного блока фиксируется счетным механизмом поворота ходового винта, связанного с кареткой (см., например, Ямбаев К.Х. Специальные геодезические приборы для инженерно-геодезических работ. - М.: Недра, 1990, с.78-81, рис.26).
Недостатками известных устройств является невозможность измерения горизонтальных углов, невозможность измерения значительных расстояний, превышающих длину базы известных устройств, а также невозможность измерений при выполнении инженерно-геодезических и маркшейдерских работ на местности (объекте) в используемых предусмотренных инструкциями геодезических построениях, линейные размеры элементов которых значительно превышают длину измерительного устройства.
Известно устройство для центрирования в фиксированной точке местности измерительного прибора, выбранное в качестве прототипа (см. патент №2383862, опубликован 10.03.2010 г., бюл. №7), содержащее систему построения изображения, ось которой совмещена с вертикальной осью вращения измерительного прибора, блок измерения по установленному алгоритму линейного и углового элементов центрирования, являющихся соответственно расстоянием в горизонтальной плоскости между фиксированной на местности точкой, в которой выполняется центрирование, и проекцией вертикальной оси вращения измерительного прибора и углом между коллимационной плоскостью измерительного прибора и направлением указанного линейного элемента. Известное устройство содержит, в частности, датчик измерения линейного и углового элементов центрирования. Использование указанного известного устройства предусматривает аналитическое центрирование измерительного прибора с учетом измеренных величин и значений линейного и углового элементов центрирования, используя которые определяют поправки в измеренные прибором величины по установленному алгоритму расчета. При этом механическое центрирование заканчивается на стадии предварительного центрирования (грубого, приближенного), при котором изображение точки местности, в которой выполняется центрирование, выводится только в поле зрения оптической системы центрира.
Недостатком указанного устройства является то, что его конструкция не предусматривает реализацию алгоритма выполнения геодезических и маркшейдерских работ в случаях, когда точка, в которой необходимо выполнять центрирование, находится вне поля зрения центрира измерительного прибора. К недостаткам указанного известного устройства относится и необходимость механических действий наблюдателя при определении линейного и углового элементов погрешности центрирования, а именно совмещение коллимационной плоскости измерительного прибора (оптического центрира) с направлением линейного элемента, совмещение зафиксированной на местности точки с центральным индексом сетки зрительной трубы центрира. При выполнении указанных действий наблюдатель должен постоянно наблюдать за своими дествиями в окуляр зрительной трубы центрира, что, в известной степени, является для него неудобным и сравнительно утомительным.
Для устранения указанных недостатков предлагается устройство для внецентренных измерений в фиксированной на местности (объекте) точке, которое содержит систему измерения углового и линейного элементов центрирования, ось которой известным образом ориентирована относительно коллимационной плоскости измерительного прибора. Указанная система измерений элементов центрирования включает в себя жезл с базисом переменной длины. Данный жезл на одном из его концов (в одной из конечных точек базиса) снабжен блоком приема излучения, а на другом конце - излучателем. Указанный излучатель ориентирован известным образом относительно продольной оси жезла и совмещен с точкой его базиса. Блок приема излучения и излучатель установлены на известном расстоянии относительно друг друга, регулируемом взаимным перемещением блока приема излучения и/или излучателя. Указанный излучатель снабжен блоком источников излучения, а блок приема излучения снабжен проектирующей системой, в пространстве изображения которой установлена матрица приемников излучения. Положение источников излучения регистрируется в условной системе координат матрицы приемников излучения. Фиксированная на местности (объекте) точка, в свою очередь, снабжена автономным излучателем, содержащим блок источников излучения, и выполнена с возможностью однозначного совмещения в рабочем положении с фиксированной точкой автономного излучателя.
Матрица приемников излучения блока приема излучения установлена с возможностью передачи сигнала в электронную систему измерительного прибора, что позволяет регистрировать положение фиксированной точки относительно определенного положения жезла относительно геометрических осей измерительного прибора.
Блок, содержащий проектирующую систему с матрицей приемников излучения, выполнен съемным с возможностью его установки непосредственно на измерительный прибор в фиксированной на приборе точке и с возможностью известной ориентации осей координат матрицы приемников излучения относительно коллимационной плоскости измерительного прибора и центра условной системы координат измерительного прибора. Это позволяет выполнять измерения расстояний и углов в точках, находящихся выше измерительного прибора (в кровле горных выработок, в верхней части тоннелей и др.). В данном случае значение базиса жезла не используется в алгоритме расчетов.
Для регулирования величины базиса в зависимости от условий измерений блок приема излучения и/или излучатель установлены с возможностью перемещения вдоль продольной оси жезла. При этом величина измененного значения базиса остается известной.
Для установки на почву жезл снабжен опорами переменной длины и установочным уровнем. Опоры переменной длины позволяют установить жезл с помощью установочного уровня в горизонтальное положение на неровной почве.
Излучатель жезла и автономный излучатель, установленный в фиксированной на местности (объекте) точке, содержат блоки источников излучения активного и/или пассивного типа с диффузным излучением и/или отражением излучения. Указанные блоки источников излучения могут содержать два и более источников излучения. В частности, блок источников излучения может представлять собой набор единичных источников излучения, расположенных по контуру правильной или известной геометрической фигуры (прямоугольника, треугольника, квадрата, круга и т.п.). Источник излучения может быть выполнен и в виде непрерывного светящегося круга.
При необходимости, в зависимости от технических условий измерений, базис излучателей, задаваемый относительным положением источников излучения, может изменяться (увеличиваться или уменьшаться). В связи с этим источники излучения излучателя жезла и автономного излучателя фиксированной на местности (объекте) точки установлены с возможностью взаимного перемещения относительно друг друга каждые в своем излучателе.
Схема устройства для внецентренных измерений и алгоритм решения задачи внецентренного измерения горизонтального угла и расстояний представлены на фиг.1, 2, 3, 4, 5 и 6.
На фиг.1 приведена схема устройства и вариант взаимного расположения измерительного прибора и устройства в рабочем положении (аксонометрическая проекция). Обозначения, принятые на фиг.1:
1, 2, 3 и 4 - источники излучения (1 и 2 - на излучателе жезла [АВ], 3 и 4 - в фиксированной на местности (объекте) точке);
5 - система построения изображения оптико-электронного центрира измерительного прибора;
6 - матрица приемников излучения оптико-электронного центрира измерительного прибора;
7 - система построения изображения блока приема излучения жезла [АВ];
8 - матрица приемников излучения жезла [АВ];
S5 - центр проекций системы 5 построения изображения оптико-электронного центрира измерительного прибора;
S7 - центр проекций системы 7 построения изображения блока приема излучения жезла [АВ];
[АВ] - жезл;
А и В - фиксированные точки жезла, образующие его базис;
1', 2' и А'- проекции источников излучения 1, 2 и точки А на матрицу 6;
К - точка местности (объекта) в которой выполняется измерение горизонтального угла и расстояний (в точке К установлен автономный излучатель с источники излучения 3 и 4);
3', 4' и К' - проекции источников излучения 3, 4 и точки К на матрицу 8;
b - базис жезла [АВ];
b12 - базис источников излучения 1 и 2;
b34 - базис источников излучения 3 и 4;
b'12 - проекция базиса b12 на матрицу 6;
b'34 - проекция базиса b34 на матрицу 8;
Т - точка стояния измерительного прибора (проекция вертикальной оси вращения прибора на горизонтальную плоскость);
Т' - проекция точки Т на матрицу 6 (ТТ' - вертикальная ось вращения измерительного прибора);
xOТуO- условная система координат измерительного прибора;
x'OT'y'O- условная система координат в плоскости матрицы 6 (проекция системы координат хOТуO на плоскость матрицы);
хВу - условная система координат блока приема излучения, установленного в одном из концов базиса жезла [АВ];
x'By' - условная система координат в плоскости матрицы 8 (проекция системы координат хВу на плоскость матрицы);
х" - ось в точке А, совпадающая, в частности, с направлением базиса b12(параллельна оси х);
αOAB - дирекционный угол направления базиса b в условной системе координат xOТуO,
КO - проекция точки К на горизонтальную плоскость, проходящую через точку В;
а - расстояние в горизонтальной плоскости между проекцией КO точки К и точкой В базиса жезла [АВ].
а'- изображение проекции а в плоскости матрицы 8.
Примечание: на фиг.1 условно принято, что системы построения изображений 5 и 7 дают обратное изображение, в связи с чем оси х'O и хO, х и х', а также у'O и уO, у и у', направлены в противоположные стороны; при использовании систем прямого изображения направления указанных осей будут совпадать.
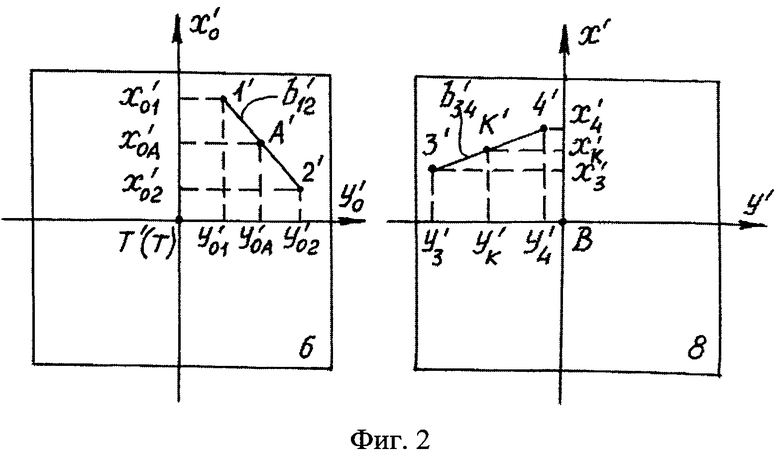
На фиг.2 показано изображение плоскостей матриц 6 и 8 приемников излучения с их условными системами координат. Обозначения, принятые на фиг.2, с учетом обозначений, показанных на фиг.1:
х'O и у'O (с индексами 1, 2, А) - координаты изображения источников излучения 1 и 2 и точки А в условной системе координат x'OT'y'O матрицы 6;
х' и у' (с индексами 3, 4, К) - координаты изображения источников излучения 3 и 4 и точки К в условной системе координат x'By' матрицы 8.
На фиг.3 показана геометрическая схема внецентренного измерения горизонтального угла βO и расстояний Lкм и LKN. Обозначения на фиг.3 с учетом обозначений, принятых на фиг.1:
М, К и N- фиксированные на местности (объекте) точки;
βO - определяемый горизонтальный угол;
LKM и LKN - определяемые расстояния;
Нтм и HTN - измеренные горизонтальные направления (отсчеты по горизонтальному кругу измерительного прибора) из точки Т соответственно на точки М и N;
NOx - направление (отсчет по горизонтальному кругу измерительного прибора), соответствующее направлению оси ТхO,
LTM и LTN - измеренные расстояния от точки стояния Т до удаленных точек Ми N сторон измеряемого горизонтального угла;
х", х"O, у "O - оси, параллельные соответствующим осям условных систем координат хOТуO и хВу;
хO и уO (с индексами 1, 2, А, В, М, N, К) - координаты источников излучения 1 и 2 и указанных точек в условной системе координат xOТуO,
х и у (с индексами 3, 4, К) - координаты источников излучения 3 и 4 и точки К в условной системе координат хВу;
αO (с индексами х, ТМ, TN, АВ, ВК) - дирекционные углы соответствующих направлений в системе координат xOТуO,
αBK - дирекционный угол направления ВК в условной системе координат хВу.
На фиг.4 показана схема внецентренного измерения расстояний и горизонтального угла в стесненных условиях. Обозначения, принятые на фиг.4 с учетом обозначений, приведенных на фиг.1 и 3:
9 - объект (например, горная выработка);
10 - измерительный прибор на штативе (станция);
11-жезл[АВ].
На фиг.5 показаны варианты внецентренного измерения с учетом возможных взаимных положений измерительного прибора и жезла (его элементов). Обозначения, принятые на фиг.2 с учетом обозначений, приведенных на фиг.1, 3 и 4:
12 - блок источников излучения 1 и 2 в точке А жезла 11;
13 - блок регистрации излучения в точке В жезла 11 от источников излучения 3 и 4, установленных в точке К (K1 - точка в боку горной выработки, К2 - точка в кровле горной выработки);
14 - штатив;
15 - измерительный прибор;
16 - установочный уровень;
17 - опоры жезла 11.
На фиг.6 представлена схема измерений горизонтального угла и расстояний для случая, когда фиксированная точка К находится над измерительным прибором (точка К2, фиг.5). В этом случае блок 13 приема информации жезла 11 размещен непосредственно на измерительном приборе. Обозначения, приведенные на фиг.6 полностью соответствуют обозначениям, приведенным на фиг.1,3.
Устройство работает следующим образом (на примере схем, изображенных на фиг.1, 2, 3, 4, 5 и 6 и отдельных условий, приведенных в тексте).
Например, в горной выработке, по одной стороне ее бока, закреплены точки подземного полигонометрического хода, в частности, точки М, N и К. Необходимо измерить горизонтальный угол βO в точке К и расстояния от точки К до точек At и N (фиг.3 и 4).
В горной выработке на штативе 14 практически в произвольном месте устанавливают измерительный прибор 15 и горизонтируют его. Место установки измерительного прибора определяется длиной базиса жезла 11, а также положением фиксированной точки К. Устанавливают жезл 11 и горизонтируют его с помощью установочного уровня 16. Положение измерительного прибора 10 относительно фиксированной точки К определяется двумя условиями:
- обеспечением наблюдения оптико-электронным центриром прибора, в который входит система построения изображения 5 с матрицей приемников излучения 6, источников 1 и 2 излучения излучателя, установленного в точке А жезла 11;
- обеспечением наблюдения источников излучения 3 и 4, установленных в фиксированной точке К, блоком приема излучения 13, размещаемым в другом конце базиса жезла 11, включающем систему построения изображения 7 с матрицей 8 приемников излучения.
Приводят в действие (включают) источники излучения на время, необходимое для регистрации от них сигнала. В результате получают координаты светящихся целей 1, 2, 3 и 4 (см. фиг.2). Значения координат источников излучения 3 и 4, как и значения координат источников излучения 1 и 2, передаются в электронную систему обработки данных измерительного прибора. Затем выполняют измерение направлений Н из точки Т на точки М и N (НTM, НTN) и расстояний от точки Т до точек М и N (LTM, LTN). Значение НOх является известным и хранится в памяти электронной системы прибора.
На этом измерительные работы на данной станции заканчиваются и далее автоматически выполняются необходимые вычисления по установленному алгоритму до получения значений определяемых горизонтального угла и расстояний. Ниже приводится один из возможных алгоритмов обработки измерительной информации, соответствующий схемам и условиям, приведенным на фиг.1-5. Алгоритм обработки результатов измерений может быть иным, при этом конечные результаты получаются тождественными.
Для реализации алгоритма расчета используются следующие измерительные данные:
- координаты источников излучения 1, 2, 3 и 4 в соответствующих системах координат матриц 6 и 8 приемников излучения (получаются автоматически после включения источников излучения);
- базис жезла и базисы источников излучения (после установки жезла 11 и источников излучения в излучателях вводятся в память измерительного прибора, если выполнялось изменение их длины);
- направления с точки стояния (станции) измерительного прибора на удаленные точки элемента полигонометрического хода (сторон измеряемого горизонтального угла), а также направление, соответствующее геометрическому положению оси хО условной системы координат измерительного прибора;
- расстояния от точки стояния (станции) измерительного прибора до удаленных точек элемента полигонометрического хода (сторон измеряемого горизонтального угла).
Алгоритм 1-й расчета:
- вычисление значений проекций базисов источников излучения по их координатам, зарегистрированным соответствующими матрицами 6 и 8:


- вычисление по разностям направлений, исходящих из точки Г, значений дирекционных углов соответствующих направлений:


- определение для систем построения изображения (оптико-электронного центрира прибора и жезла) коэффициентов увеличения (Vi - для оптико-электронного центрира прибора; V2 - для жезла):


- вычисление значений координат точек А и К в условных системах координат матриц 6 и 8 (формулы приведены для частного случая, когда точки А и К находятся посредине базисов источников излучения):




- вычисление с учетом коэффициентов увеличения систем построения изображений значений координат точки А в системе координат хOТуO и значений координат точки К в системе координат хВу:




- вычисление по значениям координат источников излучения 1 и 2
дирекционного угла направления базиса b12:

- вычисление дирекционного угла базиса b жезла в системе координат xOТуO (формула приведена для условия, когда базис излучателя жезла перпендикулярен к его продольной оси):

- вычисление координат второй точки (В) базиса:


- вычисление дирекционного угла направления ВК в системе координат

- вычисление дирекционного угла направления ВК в системе координат хOТуO:

- вычисление расстояния в горизонтальной плоскости от точки В до точки К:

- вычисление координат точек К, М и N в системе координат хOТуO:






- вычисление дирекционных углов определяемых направлений (сторон измеряемого горизонтального угла) в системе координат xOТуO:


- вычисление определяемого горизонтального угла:

- вычисление определяемых расстояний:


В случаях, когда фиксированная на объекте точка (см. фиг.5, точка К2) находится непосредственно над измерительным прибором, используется только часть жезла - блок 13 приема сигналов от источников излучения 3 и 4, который сопрягается в верхней части измерительного прибора с его геометрическими осями. В этом случае блок 13 выполняет функции оптико-электронного центрира, содержащего систему построения изображения 5 с матрицей 6 приемников излучения. Алгоритм расчета при указанной схеме измерений (см. также фиг.6) значительно упрощается.
Алгоритм 2-й расчета (для простоты примем, что геометрически оси xO и х параллельны, что может быть предусмотрено конструкциями измерительного прибора и блока 13; кроме того, известны координаты точки В начала системы координат хВу; алгоритм составлен с учетом действий, приведенных в алгоритме I):
- вычисление значения проекции базиса источников излучения 3 и 4 по их координатам, зарегистрированным соответствующей матрицей 8:

- вычисление по разностям направлений, исходящих из точки T, значений дирекционных углов соответствующих направлений:


- определение для системы построения изображения жезла коэффициента увеличения V2:

- вычисление значений координат точки К в условной системе координат матрицы 8 (см. фиг.2):


- вычисление с учетом коэффициента увеличения системы построения изображения значений координат точки К в системе координат хOТуO:


- вычисление координат точек М и N в системе координат xOТуO:




- вычисление дирекционных углов определяемых направлений (сторон измеряемого горизонтального угла) в системе координат хOТуO:


- вычисление определяемого горизонтального угла:

- вычисление определяемых расстояний:


Если система координат блока 13 смещена и развернута относительно системы координат измерительного прибора, то такое смещение является известным для используемой конструкции прибора и устройства (блока 13), в результате чего предварительно следует выполнить преобразование координат с целью определения координат фиксированной точки К.
Блок 13 приема информации может быть размещен стационарно на измерительном приборе в любом его месте, при этом положение условной системы координат матрицы 8 приемников излучения (смещение и разворот) относительно системы координат измерительного прибора является известным.
Таким образом, использование заявленного устройства для внецентренных измерений позволяет выполнять необходимые геодезические и маркшейдерские измерения в стесненных условиях при любом расположении точек геодезического обоснования относительно измерительного прибора. При этом измерительный прибор механически не центрируют, не устанавливают в строго установленное место концы базиса жезла, а также не выполняют точное центрирование в случаях, когда фиксированная на объекте точка находится непосредственно над измерительным прибором.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННЫЙ ЦЕНТРИР | 2010 |
|
RU2452920C1 |
| СПОСОБ УСТАНОВКИ ИЗМЕРИТЕЛЬНОГО ПРИБОРА В РАБОЧЕЕ ПОЛОЖЕНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2428656C1 |
| ПРИБОР ВЕРТИКАЛЬНОГО ПРОЕКТИРОВАНИЯ | 2011 |
|
RU2481556C1 |
| СПОСОБ ЦЕНТРИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423664C2 |
| СПОСОБ ЦЕНТРИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2383862C1 |
| ПРИБОР ВЕРТИКАЛЬНОГО ПРОЕКТИРОВАНИЯ | 2015 |
|
RU2589239C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ЦЕНТРИР | 2009 |
|
RU2430332C2 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| СИСТЕМА ОРИЕНТИРОВАНИЯ МОБИЛЬНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ИЗВЕСТНОМУ ОРИЕНТИРНОМУ НАПРАВЛЕНИЮ | 2024 |
|
RU2838002C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ДВУХ ДИРЕКЦИОННЫХ УГЛОВ И ОДНОГО УГЛА МЕСТА | 2015 |
|
RU2601494C1 |




Изобретение относится к области геодезических измерений, а также к области геодезического приборостроения. Устройство для внецентренных измерений комплектуется жезлом, имеющим базис известной величины, на одном конце которого установлен излучатель с источниками излучения, положение которых регистрируется оптико-электронным центриром измерительного прибора, на другом конце базиса установлен блок приема излучения, аналогичный соответствующему блоку оптико-электронного центрира, принимающий сигнал от источников излучения, установленных в фиксированной точке местности. Сигнал о положении фиксированной точки из блока приема направляется для обработки в электронную систему измерительного прибора, в которой по установленному алгоритму выполняется вычисление определяемых расстояний и горизонтальных углов. Кроме этого блок приема излучения может автономно от жезла устанавливаться в верхней части измерительного прибора для наблюдения и регистрации координат фиксированных на объекте точек, находящихся непосредственно над измерительным прибором, например в кровле горных выработок, тоннелей и т.п. Техническим результатом изобретения является исключение механического центрирования измерительного прибора, т.е. упрощение измерений. 6 з.п. ф-лы, 6 ил.
1. Устройство для внецентренных измерений в фиксированной на местности (объекте) точке, используемое с электронными геодезическими приборами, оснащенными оптико-электронным центриром, содержащее систему измерения углового и линейного элементов центрирования, ось которой известным образом ориентирована относительно коллимационной плоскости измерительного прибора, включающую жезл с известным базисом переменной длины, отличающееся тем, что жезл снабжен блоком приема излучения, излучателем, ориентированным относительно продольной оси жезла и совмещенным с точкой его базиса, установленными на известном расстоянии относительно друг друга, упомянутый излучатель снабжен блоком источников излучения, а блок приема излучения снабжен проектирующей системой, в пространстве изображения которой установлена матрица приемников излучения, при этом положение источников излучения известным образом задано относительно условной системы координат матрицы приемников излучения, а упомянутая фиксированная на местности (объекте) точка снабжена автономным излучателем, содержащим блок источников излучения, и выполнена с возможностью однозначного совмещения с фиксированной точкой автономного излучателя.
2. Устройство по п.1, отличающееся тем, что матрица приемников излучения установлена с возможностью передачи сигнала в электронную систему измерительного прибора.
3. Устройство по п.1, отличающееся тем, что блок, содержащий проектирующую систему с матрицей приемников излучения, выполнен съемным с возможностью его установки непосредственно на измерительный прибор в фиксированной на приборе точке и с возможностью известной ориентации осей координат матрицы приемников излучения относительно коллимационной плоскости измерительного прибора.
4. Устройство по п.1, отличающееся тем, что блок приема излучения и/или излучатель установлены с возможностью перемещения вдоль продольной оси жезла.
5. Устройство по п.1, отличающееся тем, что жезл снабжен опорами переменной длины и установочным уровнем.
6. Устройство по п.1, отличающееся тем, что излучатель жезла и автономный излучатель, установленный в фиксированной на местности (объекте) точке, содержат блоки источников излучения активного и/или пассивного типа с диффузным излучением и/или отражением излучения.
7. Устройство по п.1, отличающееся тем, что источники излучения излучателя жезла и автономного излучателя фиксированной на местности (объекте) точки установлены с возможностью взаимного перемещения относительно друг друга каждые в своем излучателе.
| СПОСОБ ЦЕНТРИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2383862C1 |
| Ямбаев К.Х | |||
| "Специальные геодезические приборы для инженерно-геодезических работ" | |||
| - М.: Недра, 1990, с.78-81, рис.26 | |||
| ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВЫХ КООРДИНАТ | 2008 |
|
RU2357270C1 |
| WO 2009109202 А1, 11.09.2009 | |||

