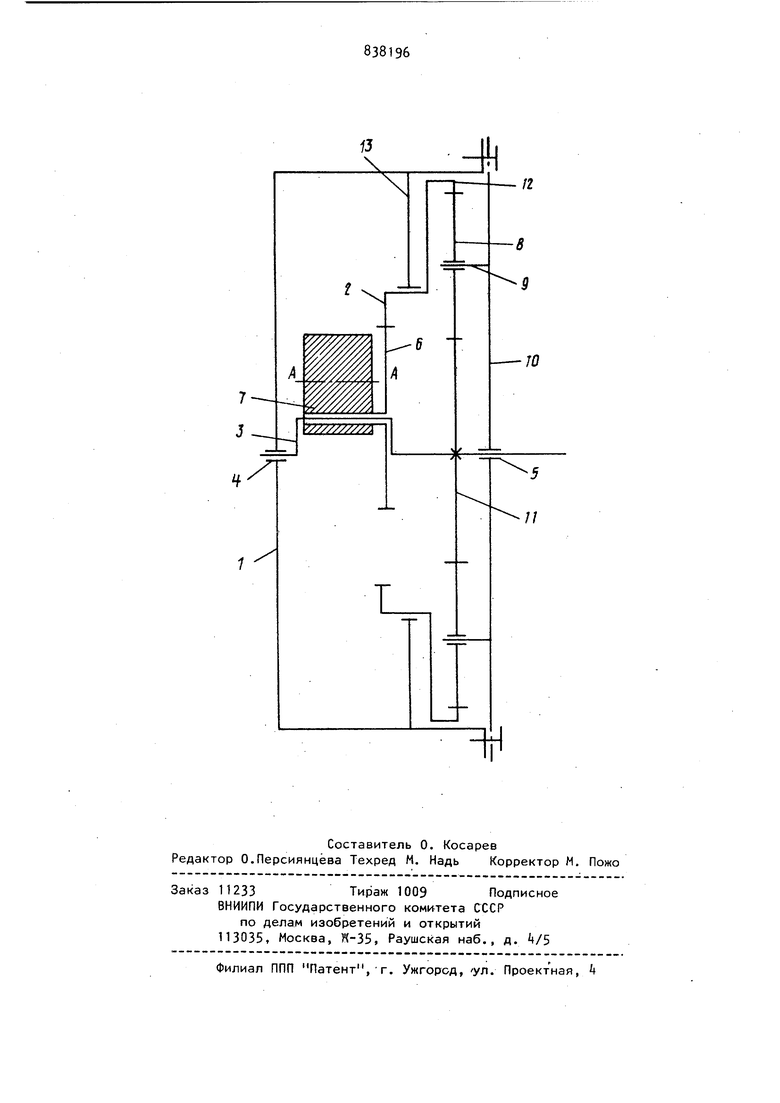
(5) yCTPOigCTBO ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНОПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ВО ВРАЩАТЕЛЬНОЕ И НАОБОРОТ ричсскои оси ведомого звена с заданным прямолинейным движением. Указанная цель достигается тем, что в этом известном устройстве непо вижные оси сателлитов дополнительног планетарного механизма закреплены на крышке-, установленной в корпусе с возможностью поворота относительно своей оси и последующего закрепления на корпусе. ее На чертеже схематично изображено предлагаемое устройство, продольный разрез. Устройство для преобразования воз вратно-поступательного перемещения во вращательное и наоборот содержит корпус 1, центральное колесо 2 с вну ренними зубьями, вращающееся водило 3, выполненное в виде кривошипного вала, опирающегося на подшипниковые опоры А,5 сателлит 6, находящийся в зацеплении с центральным колесом 2 вэдомое звено 7, жестко связанное с саттелитом 6 и эксцентрично расположенное на водиле с эксцентриситетом, равным радиусу кривошипной окружности водила 3, дополнительный планетарный механизм с сателлитами 8 установленными на неподвижных осях 9 закрепленных на крышке 10, солнечная шестерня 11 которого жестко со1динен с водилом З, а эпицикл 12 жестко сое динен с центральным колесом 2, опирающимся на подшипниковую опору 13. Устройство работает следующим образом. При вращении водила 3 ведомое зве но 7 синхронно поворачивается с той же угловой скоростью, что и водило, но в противоположную сторону, что достигается соответствующим подбором чисел зубьев шестерен. В результате сложения двух вращательных движений водила 3 и ведомого звена 7 ге метрическая ось ведомого звена, которая на чертеже обозначена А-А, соб 4 вершает возвратно-поступательное движение. Корректировка угловой нап- равленности этого движения осуществляется при сборке устройства путем поворота крышки 10 относительно своей оси и последующей фиксации ее на корпусе 1 . Аналогичную корректировку можно обеспечить также путем поворота ведомого звена 7 относительно сателлита 6, или же поворота центрального колеса 2 относительно эпицикла 12 с после ующим жестким соединением соответствующих звеньев.. Такое выполнение устройства позволяет добиться идеального совмещения траектории движения геометрической оси ведомого звена, а следовательно, и связываемого с ним рабочего органа с заданным прямолинейным направлением без предъявления особых требований к точности изготовления и монтажа устройства. Формула изобретения Устройство для преобразования возвратно-поступательного перемещения во вращательное и наоборот по авт.св. № 587759, отличающееся тем, что, с целью повышения точности устройства, неподвижные оси сателлитов дополнительного планетарного механизма закреплены на крышке, установленной в корпусе с возможностью поворота относительно своей оси и последующего.закрепления ее на корпусе. Источники информации, принятые во внимание при экспертизе 1.Кожевников С. И. и др. Механизмы. М., Машиностроение, , с. 287, фиг. 3.. 2.Авторское свидетельство СССР № 537759, кл. А 16 И 19/02, 197.
/2