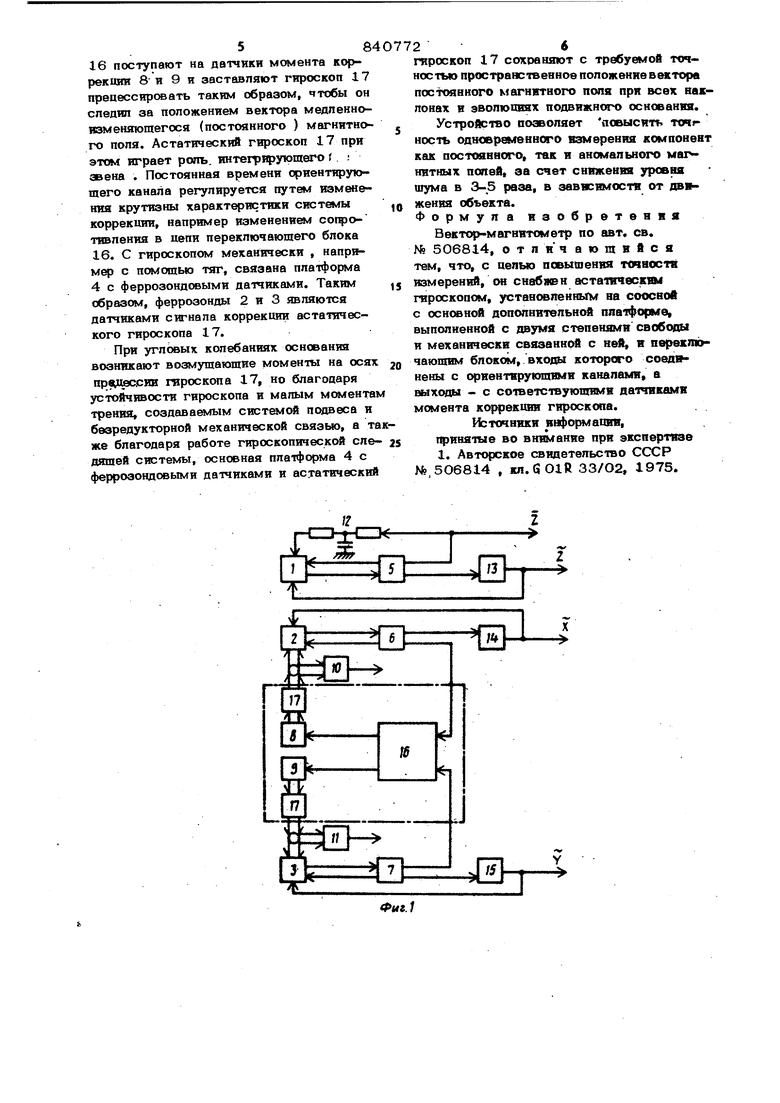
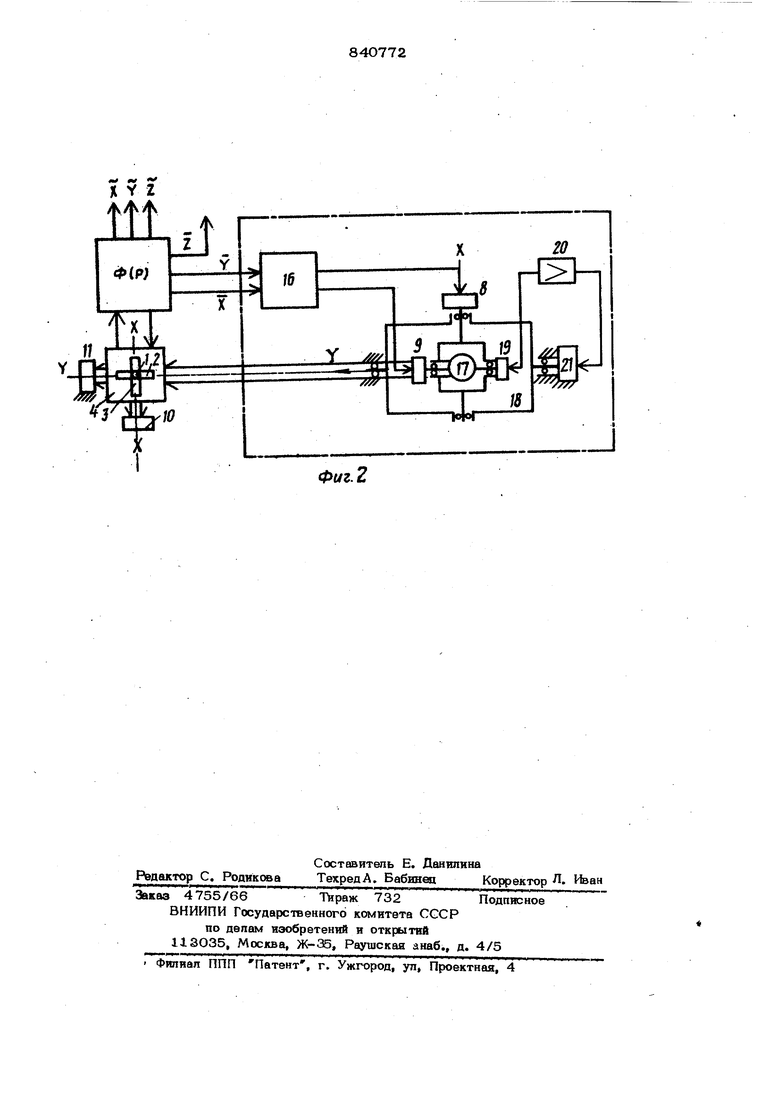
{Ьобретение относится к магнитным измерениям и может быть использовано дпя измерения компонент вектора постоян ного н переменного попей. По основному авт. св. № 506814 иэвестно устройство для измерения компонент вектора постоянного и переменного магнитного попей и двух углов, определяю щих положение вектора постоянного магни ного поля в пространстве , используются три феррозонда с корректирующими обмот ками, установленные взаимно перпендикулярно на платформе, имеющей две сте пени свободы, один измерительный и два ориентирующих канала с интегрирующими звеньями в виде серводвигателей, кинематическую сиему, сопряженную с платформой двумя указанными серводвигателями и два потенциометра углов поворота платформы, а также три избирательных усилителя, входы которых подключены параллельно входам интегрирующих зве ньев соответствующих каналов, а выхрды соединены с корректирующей обмоткой соответствующего феррозонда Til г Однако известное устройство имеет погрешности измерения компонент магнитного поля при сравнительно быстрых угловых колебаниях подвижного г снования вследствие запаздывания в реакции ориентирующих канал(ж с интегрирующими звень51ми и наличия кинематической. свя зи (редуктора) в схеме сопряжения серводвигателей с платформой. Цель изобретения - повышение точноот« измерения. Поставленная иепь достигаетса тем, ° что вектор-магнитометр, который содв| жит три феррозонда с корректирующими обмотками, устанс ленных взаимно перпендикулярно на основной платформе, вмоющей две степени свобсэды, оаин яамврв тельный канал с интегрирующей цепочкой и два ориентирующих канапа с 1ште1 рируюшими звеньями , датчика момента коррекции гироскопа (безредуктор- ные серводвигатели), механически свя-. эанные с потенциометрами . три избире тельиых усипитепя, вход одного из которых включен параппепьно входу интегриру ющей цепочки, а входы двух других параллельно интегрирующим звеньям ори ентирующих каналов, при этом выходы кэбирательных усилителей соединены с корректирующей обмоткой соответствующего феррозонда,снабжен астатическим гироскопом, устажжленным на соосной с основной дополнительной платформе, выполненной с двумя степенями свободы я механически связанной с ней, и пеоеклю чвюптим бцокрм, входы которого соединены с ориентирующими каналами, а выхо ды - с соответствующими датчиками момента коррекции гироскопа. Благодаря использе аншо астатическог гироскопа и отсутстеию редукторе на ег осях прецессии повышается устойчивость пространственной стабилизацин основной плошааки с феррозондовыми датчиками, повышается точность слежения за вектором постоянного магнитного поля, а также расширяется диапазон регулировки постоянной времени ориентирующего канала На фиг. 1 изображена структурная схе ма предлагаемого устройства; на фиг. 2 принципиальная схема устройства. Устройство (фиг. 1) содержит феррозонды 1-3 с корректирующими о&лотками, установленные взаимно перпендикуляр но на оснсганой платформе 4, )юмервтель ный канал 5, ориентирующие каналы b и 7, датчики в и 9 момента коррекции г роскопа (беэредукторные се одвигатели) механически связанные с потенциометрами 1О и 11 интегрирующее звено 12 измерительного канала. Избирательные усилители 13-15 включены параллельно входам интегрирующего звена 12 и перш лючающего блока 16, а выходы избирате льных усилителей подключены к корректирующим обмоткам феррозондсв 1-3, причем нижняя частота частотных характеристик усилителей 13-15 выше верхней граничной частоты колебаний платформы. Выходы переключающего блок 16 подключены к соответствующим датчи кам 8 и 9 момента коррекции гироскопа, установленных на осях прецессии астатического гироскопа 17, механическ связанного с феррозондами 2 и 3 и об разующего ссжместно с усттепяму кана лов иитегрнруюпше звенья ориентирующих каналов 6 и 7. Гироскоп 17 (фиг. 2) подвешен в OByxocHtJM кардановом подвесе, по осям которого установлены датчики 8 и 9 момента. Для исключения вероятности боя в работе гироскопа 17 при совпадении его оси собственного вращения с осью прецессии гироскоп 17с кардановым г подвесом установлен в дополнительную следящую раму 18 и в схему гироскопа введена безредукторная следящая сист&ма, состоящая из датчика 19 утла, усилителя 2О и двигателя 21, расположенного на оси вращения рамы 18. Переключающий блок 16 предназначен для ускоренной грубой выставки гироскопа и феррозондов по вектору магнитного пог1Я перед запуском гиромоторсю, а также для осуществления переключения каналсв с уменьшением крутизны коррекции после запуска гиромоторов, необходимое для нормальной работы гироскопической след5к щей системы. Устройство работает следующим образом. При пуске вектор-магнитометра, когда переключающий блок 16 находится в поло жении Запуск, сигналы с феррозондов расположенных по OCSIM X и У , поступают непосредственно на датчики момента коррекции, расположенные несоосно, т.е. X - на датчик 9 момента, а - на датчик 8. Платформа 4 с феррозондами автоматически ориентируется в пространстве таким образом, что ось чувствительности феррозонда 1 оказывается грубо направленной по вектору постоянного магнитного поля, при этом на аыходе пот1внциометрс Ю и 11 появляется сигнал, характеризующий положение этого вектора относительно системы координат, связанной с корпусом прибора, а с выхода усили телей 13-15 поступают сигналы, харак- т взующие велвчнну компонент вектора индукшт. переменного магнитного поля. Затем переключающим блоком 16 осуще ствляется пуск гиромоторов, и когда они набирают необходимый кинематический момент, осуществляется переключение в положение Работа, при этом сигналы с X -феррозонда.поступают на датчик 8 момента коррекции, а с - на датчик 9. Одн(ременно снижается крутизна характеристики коррекции гироскопа. При медленном изменении пространственного положения вектора индукции магнитного поля на выходе ориентирующих каналов 6 и 7 появляются сигналы коррекцт, которые через переключающий блок 16 поступают на датчики момента коррекции 8 и 9 и заставляют гироскоп 17 прецессирсеать таким образом, чтобы он следил за положением вектора медленноизменяющегося (постоянного ) магнитного поля. Астатический гироскоп 17 при этом играет роль, интегрирующего ( : шена . Постоянная времени ориентирующего канала регулируется путем изменения крутизны характеристики системы коррекции, например изменением COJ BOтивления в цепи переключающего блока 16. С гироскопом механически , например с помощью тяг, связана платформа 4 с феррозондовыми датчиками. Таким образом, феррозонды 2 и 3 являются датчиками сигнала коррекции астатического гироскопа 17. При угловых колебаниях основания возникают возмущающие моменты на осях npetueccHH гироскопа 17, но благодаря устойчивости гироскопа и малым момента трения, создаваемым системой подаеса и безредукторной механической связью, а т же благодаря работе гироскопической еле дящей системы, основная платформа 4 с феррозондовыми датчиками и астатический
/f 84
2 гироскоп 17 сохраняют с требуемой точностью пространственное положение вмстора постоянного магнитного поля при всех наклонах и эволюцвях подвижного осноеаниа. Устройство аоаволяет повысить точ ность одновременного измерения компонент как постоянвого, так и аномального ма нитных попей, за счет снижения уровня шума в 3-5 раза, в зависимоств от движения объекта. Формула изобретеияя Вектор-магнитометр по авт. св. № 506814, отпич ающнйся тем, что, с целью повышения точноств измерений, он снабяен астатеческА гироскопом, установленных на соосной с основной дополнительной ппа1формв, выполненной с двумя степенями свобооы и механически связанной с ней, и перектЬчающим блоком, входы которого соед нены с ориентирующими каналами, а выходы - с сответствующими даттакамя момента коррекции гироскопа. Источники информации, гфинятые во внимание при экспертизе 1. Авторское свидетельство №,506814 , кл.аОШ 33/02, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вектор-магнитометр | 1973 |
|
SU506814A1 |
| СПОСОБ КОРРЕКЦИИ ФЕРРОЗОНДОВЫХ СЛЕДЯЩИХ СИСТЕМ | 1966 |
|
SU202276A1 |
| СПОСОБ МИНИМИЗАЦИИ ПОГРЕШНОСТЕЙ В ДИФФЕРЕНЦИАЛЬНОМ МАГНИТОМЕТРЕ | 2003 |
|
RU2257593C2 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2006 |
|
RU2316781C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЗАДАННОГО УРОВНЯ МОДУЛЯ ВЕКТОРА ИНДУКЦИИ ГИПОГЕОМАГНИТНОГО ПОЛЯ В ЭКРАНИРУЮЩЕЙ ЦИЛИНДРИЧЕСКОЙ КАМЕРЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2545466C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2124737C1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2008 |
|
RU2380718C1 |
| Магнитометр с устройством компенсации магнитных помех от носителя | 1977 |
|
SU693319A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| БОРТОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2008 |
|
RU2368872C1 |
Л V Z
Фиг.2
