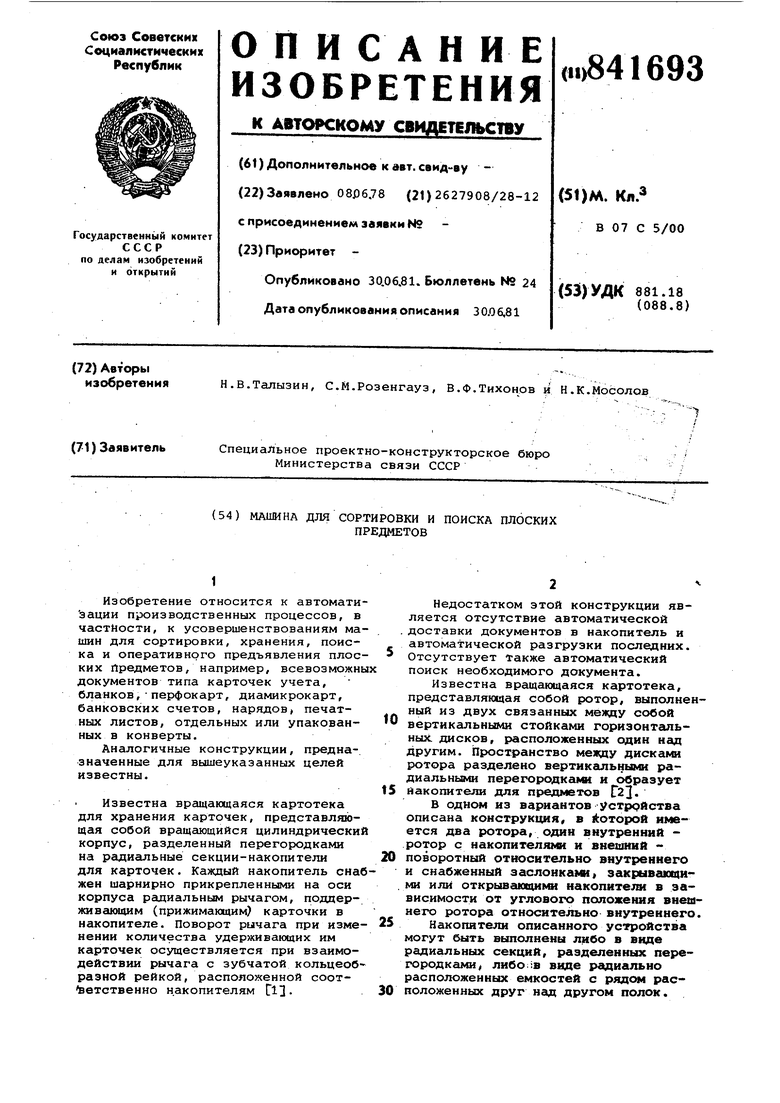
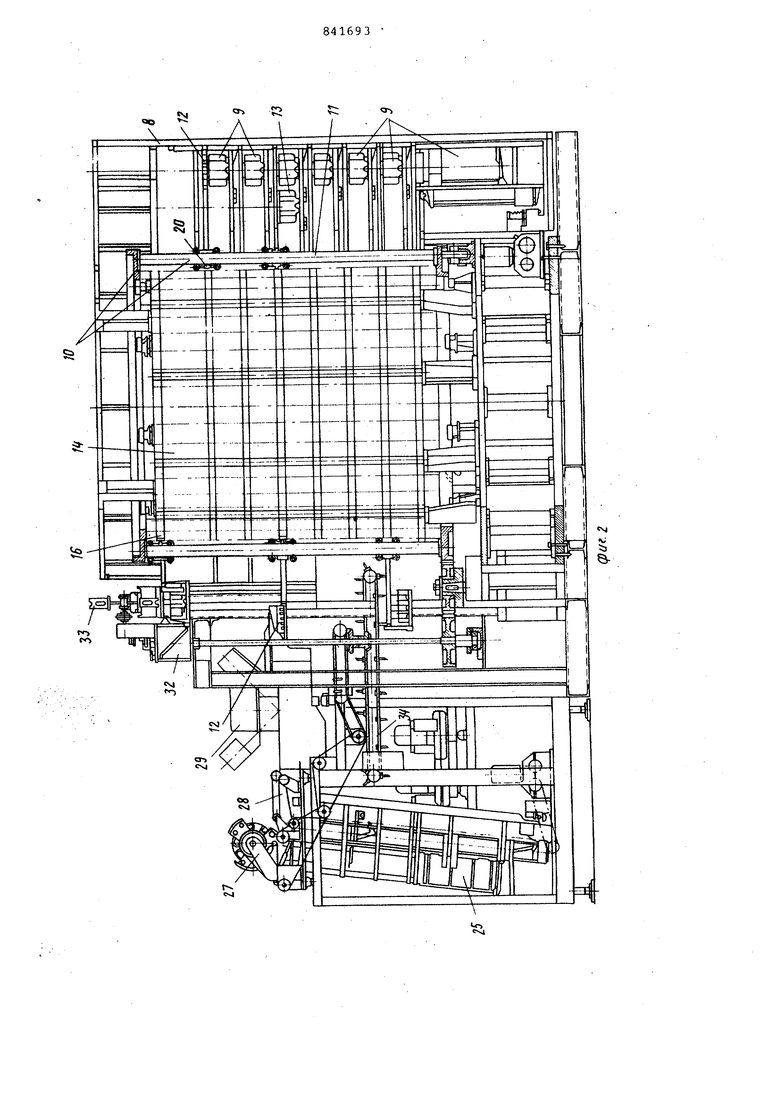
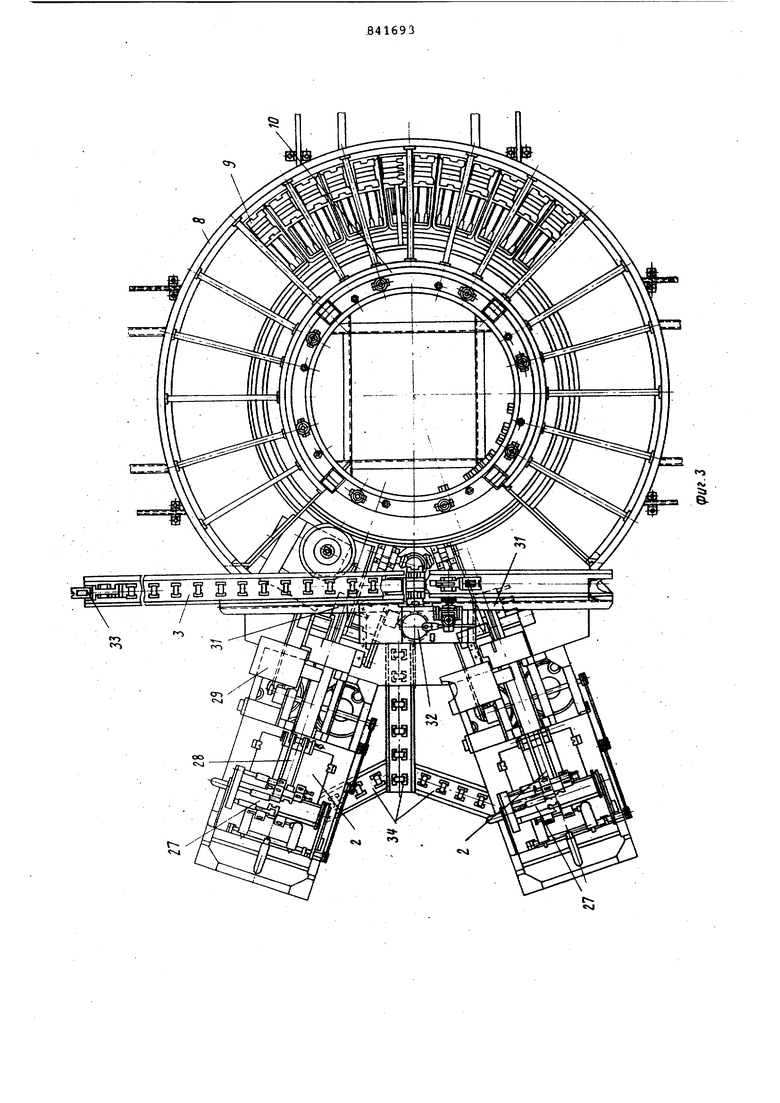
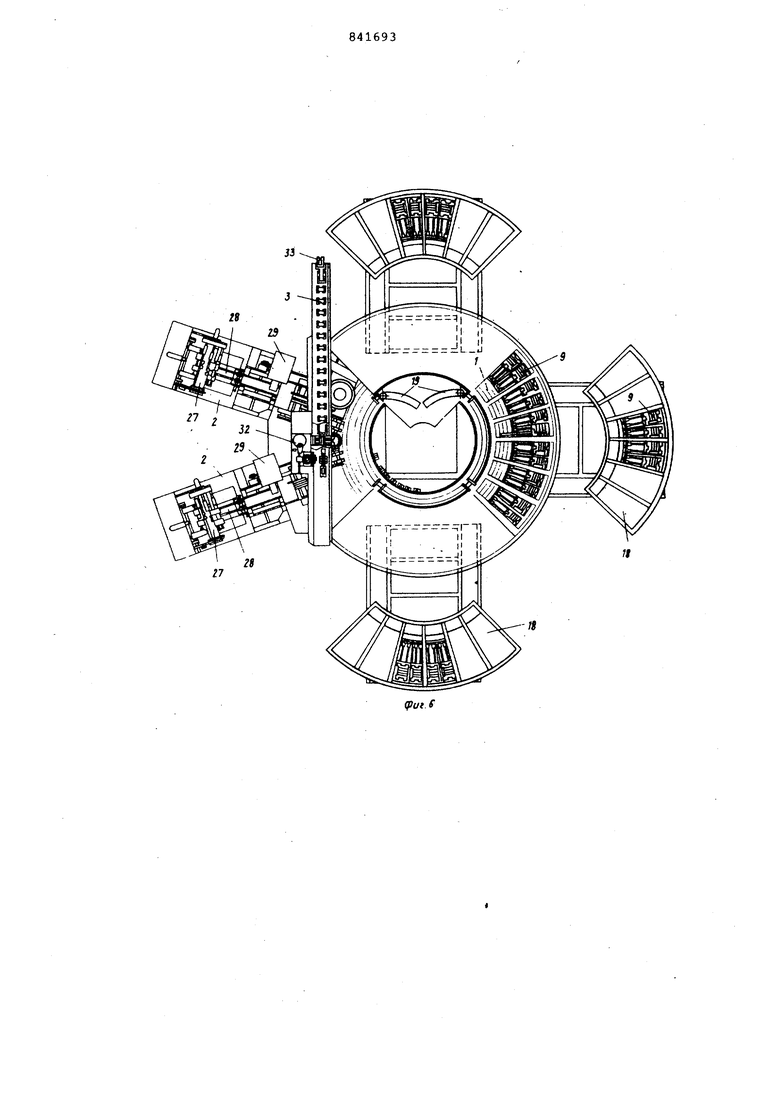
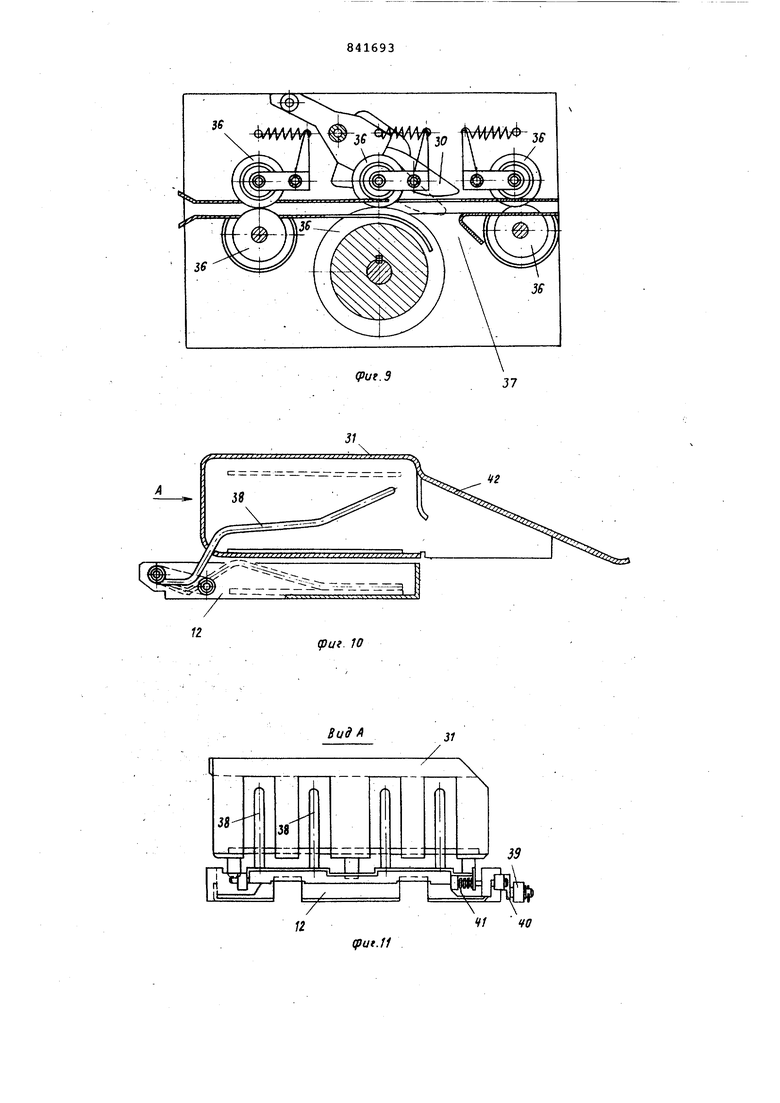
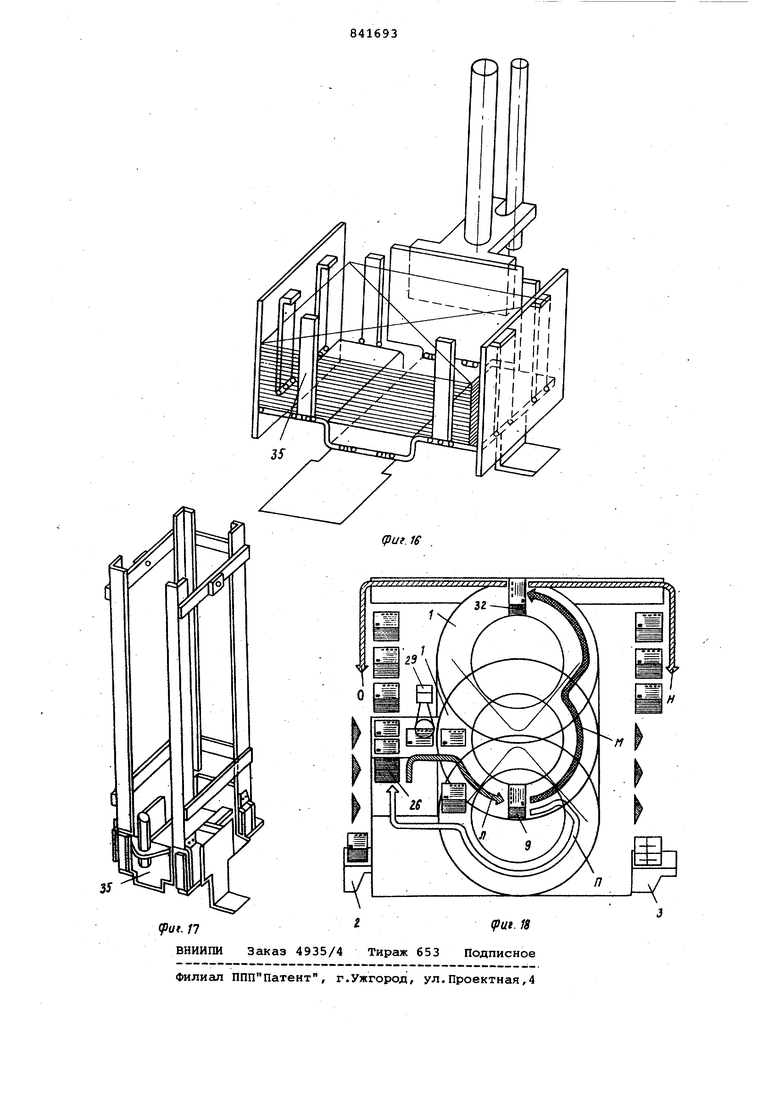
Изобретение относится к автомати зации производственных процессов, в частйости, к усовершенствованиям ма шин для сортировки, хранения, поиска и оперативного предъявления плос ких йредматов, например, всевозможн документов типа карточек учета, бланков,-перфокарт, диамикрокарт, банковских счетов, нарядов печатных листов, отдельных или упакованных в конверты. Аналогичные конструкции, предна-. значенные для вышеуказанных целей известны. Известна вращающаяся картотека для хранения карточек, представляющая собой вращающийся цилиндрически корпус, разделенный перегородками на радиальные секции-накопители для карточек. Каждый накопитель сна жен шарнирно прикрепленными на оси корпуса радиальным рычагом, поддерживающим (прижимающим) карточки в накопителе. Поворот рычага при изме нении количества удерживающих им карточек осуществляется при взаимодействии рычага с зубчатой кольцеоб разной рейкой, расположенной соответственно накопителям Г13 Недостатком этой конструкции является отсутствие автоматической доставки документов в накопитель и автоматической разгрузки последних. Отсутствует также автоматический поиск необходимого документа. Известна вращающаяся картотека, представляющая собой ротор, выполненный из двух связанных меящу собой вертикальными стойками горизонтальных, дисков, расположенных один над другим. Пространство между дисками ротора разделено вертикгшьными радиальнь о1 перегородками и образует Накопители для предметов Г21. В одном из вариантов устррйства описана конструкция, в оторой имеется два ротора, один внутренний ротор с накопителями и внешний - поворотный относительно внутреннего и снабженный заслонками закрывающими или открывающими накопители в зависимости от углового положения внешнего ротора относительно внутреннего. Накопители описанного устройства могут быть выполнены либо в внде радиальных секций, разделенных перегородками либо::в виде рсщиально расположенных емкостей с рядом расположенных друг над другом полок. Недостатком данной конструкции также является отсутствие автоматической загрузки и выгрузки накопителей и отсутствие поиска необходимого изделия. Известны две информационно-поискоиые системы (ИПС) Гз , 1. ИПС Наgпаса гd содержит сортировальную установку с четырьмя вакуумными барабанами. Оперирует система магнитными или видеомагнитными картами , которые поступают в горизонтальные магазины. Емкость каждого магазина до 3 тыс. карт. Сортировка магнитных карт производится вакуумными барабанами. Бараба ны снабжены вакуумным устройством для транспортирования карт, передач их с барабана на барабан, устройств для задержки видеомагнитных карт и проецирования их изображения на бол шой экран. Горизонтальные магазины хранятся в специальных автоматизиро ванных хранилищах, оборудованных устройством перемещения магазинов как в горизонтальной плоскости, так и в вертикальной для подачи их к со тировальной установке. Недостатком данной системы является необходимость предварительной подготовки информации для хранения, т.е. перевод этой информации на маг нитные или видеомагнитные карты. Кроме того, очень часто существу ет необходимость хранения и автомат ческого учета подлинников документо в конвертах, чего не предусматривает система по данному патенту. 2. ИПС Walnut создана американ кой фирмой International Business Machines Corporation по заказу Цент рального разведывательного управления США (ЦРУ). Информация переводит ея на микропленку. Форматные микрофиль /lы хранятся в пластмассовых кас сетах, а эти кассеты - в радиальных магазинах барабана пассивного хране ния ЗУпр.. Адрес документа в , ИПС Wal nut состоит из номера кассеты в этом модуле, порядкового номера кас сеты в этом модуле, порядкового номера форматного микрофильма в кассе те, номера кадра и числа страниц в документе. После считывания адреса с ап ртурной перфокарты барабан ncici путем поворота и радигшьного сдвига в кратчайшем направлении уст на ливает нужную кассету в положение выборки. Затем специальное устройство юстирует положение кассеты в блоке выборки, зажимной механизм этого блока захватывает нужный форматный микрофильм и вьщвигает его из кассеты настолько, чтобы первый кадр микрокопии требуемого документа оказался в положении рекопирования. Недостатком данной системы является .необходимость перевода информации на специальные носители. Известно устройство для сортировки предметов, преимущественно письменной корреспонденции, содержащее транспортирующие средства и селекторы, размещенные в направляющих каналах, смещенных один относительно другого в одной плоскости, и соединяющие накопители со средствами ввода. Перед накопителями направляющие каналы имеют боковые ответвления с каналами и транспортирующими средствами, расположенными в плоскости, перпендикулярной плоскости расположения направляющих каналов, при этом селекторы последовательно установлены в направляющих каналах со смещением в направлении перемещения предметов, причем наиболее удаленный от накопителей селектор расположен первым в направлении перемещения предметов. Однако данное устройство не предусматривает инвертируемую сортировку предметов, т.е. нахождение уже отсортированного предмета и выдачу его из устройства Г47. Известна машина для сортировки плоских предметов содержащая цилиндрический корпус, на стенках которого по периферии расположены в несколько ярусов накопители предметов, и устройство для транспортирования предметов, выполненное в виде установленного внутри корпуса поворотного барабана типа беличье колесо, на спицах которого с возможностью перемещения вдоль последних смонтированы предметоносители для транспортирования предметов в накопители, контей- неры для вывода предметов из накопителей и кулачки.для вьщвижения платформ накопителей при выводе предметов, взаимодействующие через блок селекторов с соответствующим профилем неподвижного цилиндрического копира, а также устройство для ввода предметов в машину, снабженное механизмом подачи массива предметов, сепаратором и средством для опознавания отличительного признака каждого предмета, конвейер для вывода предметов из машины и устройства для автоматического управления машиной Гз. Однако данная машина также не предусматривает инвертируемую сортировку предметов, т.е. нахождение уже отсортированного предмета и выдачу его из устройства, а объем хранимых плоских предметов ограничивается одним цилиндрическим блоком. Цель изобретения - обеспечение инвертируемой сортировки и расширение функциональных возможностей машины ,за счет обеспечения целевого отбора предметов из группы предметов отсортированных в соответствующие накопители. Указанная цель достигается тем, что машина снабжена устрюйстврм для перегрузки группы предметов из заданного накопителя в устройство для ввода предметов в машину, представляющим собой платформу, смонтирован ную с возможностью перемещения в радиальном направлении от оси машин и оперативно взаимодействующей с од ной стороны с контейнером, доставляющим группу предметов из накопите ля, а с другой стороны с механизмом подачи предметов к сепаратору устройства для ввода предметов в машин причем неподвижный цилиндрический копир снабжен дополнительными блоками селекторов и профилями, замкну тыми по окружности копира в его вер ней и нижней частях. Устройство для ввода предметов в машину снабжено клапаном для отклонения предметов на стол оператора, коробкой приема и оперативног хранения предметов, выполненной раз резной для прохождения сквозь нее предметоносителя, доставляющего пред меты в накопитель. Каждый предметоноситель выполнен в виде челюстного захвата аллигатор ного типа. Цилиндрический корпус машины выполнен из нескольких секций, подвижных в радиальном направлении, а корпус цилиндрического копира выпол нен составным из ряда блоков, поворотных внутрь машины, кроме этого, конвейер для вывода предметов из ма шины смонтирован в верхней части ци линдрического корпуса машины и примыкает к верхнему дополнительному профилю цилиндрического копира. , С целью обеспечения увеличения количества накопителей за счет увеличения числа цилиндрических корпусов машины путем присоединения их друг к другу, цилиндрический корпус машины снабжен дополнительной коробкой приема и оперативного хранения предметов, взаимодействующей с предметоносителями присоединяе1иых корпу сов, а конвейер для вывода предметов из машины также выполнен взаимодействующим с контейнерами присрединяемых корпусов, причем платформа устройства для перегрузки групп предметов из накопителя к устройству для. ввода -предметов в машину выполнена подвижной вдоль присоединяемых цилиндрических корпусов. На фиг. 1 изображена машина для сортировки и поиска плоских предметов, снабженная пультом управления, средствами электроники и управляющим вычислительным комплексом, общий вид на фиг. 2 - механическая часть машины, вид сбоку, на фиг. 3 то же, вид сверху на фиг. 4 - кинематическая схема машины, на фиг. 5 - машина в плане с двумя цилиндрическими блоками для увеличе- ния объема хранимой информации,.общий вид; на фиг. 6 - машина в плане с вьювинутыми секциями накопителей, общий вид; на фиг. 7 - модуль селекторов для изменения направления движения трех потоков плоских предметов, показанный со спицалда беличье-го колеса и каретками) на фиг. 8 развертка неподвижного цилиндрического копира с системой распределительных каналов; на фиг. 9 - клапан для отклонения плоских предметов на стол оператора, на фиг. 10 - сечение коробки приема и оперативного хранения плоских предметов с иосителем этих предметов, на фиг. 11 вид А на фиг. 10; на фиг. 12 - носитель плоских предметов , на фиг. 13вид Б на фиг. 12; на фиг. 14 - вид В на фиг. 13, на фиг. 15 - вид Г на фиг. 13; на фиг. 16 - подвижная платформа для передачи групп плоских предметов во вводное устройство; на фиг. 17 -. бункер для оперативного хранения массива плоских предметов и их подачи к сепаратору на фиг. 18общая схема инвертируемой сортировки плоских предметов. Машина для сортировки и поиска плоских предметов содержит механическую часть в виде цилиндрического блока 1 (фиг.1) с устройствами 2 ввода плоских предметов в машину и устройствами 3 вывода групп плоских предметов из машины и электронную часть в виде управляющего вычислительного комплекса 4, читающего автомата 5, средств 6 электропитания и общего пульта 7 для управления электронной и механической частями маши ны. Механическая часть машины содержит цилиндрический каркас 8 (фиг.2, 3 и 4), на наружной поверхности которого по периферии расположены в несколько ярусов накопители 9. Внутри цилиндрического каркаса 8 коаксиально установлен приводной барабан 10типа беличье колесо, на спицах 11которого установлены с возможностью перемещения вдоль оси спиц носителя 12 плоских предметов и контейнеры 13 для выгрузки из накопителей 9 групп плоских предметов. Внутри приводного барабана 10 ,также коаксиально установлен неподвижный цилиндрический копир 14 с системой ра,спределительных каналов 15. Каждый носитель 12 и контейнер 13 оперативно связаны при помощи ролика 16 с соответствующим каналом копира 14. частки каналов копира в местах сопряжения между собой снабжены пееводными стрелками 17, передвигаеыми устройством управлеиия машииой. Механическая часть машины может содержа гь несколько цилиидрических блоков 1 (фиг.5) подобных описаииому выше, для увеличения направлений со тировки и объема хранения плоских предметов. Цилиндрический каркас 8 с накопи телями 9 состоит из секций 18 (фиг. которые могут перемещаться в радиал ном направлении от оси машины, а корпус цилиндрического копира 14 вы полнен составным из ряда блоков 19, поворотных внутрь машины для обеспе чения удобства ремонта и обслуживания транспортно-распределительного устройства машины. Передвижные стрелки 17.распределительных каналов 15 связаны с приводом и управляющим устройством и сведены в так называемые модули селекторов (фиг.7), где также показан спицы 11 приводного барабана 10 тип беличьего колеса, на которых уста новлены каретки 20, подвижные вдоль оси спиц и жестко связанные одной стороной с роликами 16, взаимодействующими с соответствующим каналом 15 копира 14 и стрелкой 17, а другой стороной жестко связанные с носителями 12 плоских предметов или с контейнерами 13 групп плоских предметов. .Развертка цилиндрического копира 14(фиг.8) представляет собой ряд параллельно расположенных распределительных каналов 15, из .которых верхний канал 21, нижний 22 и центральный 23 выполнены замкнутыми по окружности копира 14. Другие каналы 15выполнены сообщающимися между со бой и с тремя замкнутыми каналами 21, 22 к 23 при помощи наклонных к вертикальной оси машины каналов 24. На фиг.8 также показаны передвижные стрелки 17, служащие для направления носителей 12 и контейне ров 13 в тот или иной ярус накопителей 9.. Устройств 2 ввода плоских предметов в машину может быть несколько в зависимости от требуемой производительности машины (фиг.3-6). Каждое устройство 2 ввода содержит механизм 25 для подачи массива 26 предметов к механизму 27 для отделе ния (сепарации) из массива по одном предмету, механизм 28 транспортирования предметов на позицию считывания их отличительных признаков, оптико электронное считывающее средст BU 2р, клапан 30 (фиг.9) для извлечения искомого предмета из потока на стол оператора и коробку 31 (фиг.10) для приема и оперативного хранения плоских предметов. Коробка 31 приема и оперативного хранения плоских предметов выполнена разрезной для прохождения сквозь нее .носителя 12 (фиг.10-15), выполненного в виде челюстного захвата аллигаторного типа. В случае наличия в машине несколУких цилиндрических блоков 1 (фиг.5), каждый цилиндрический блок снабжается коробкой 31 для приема и оперативного хранения плоских предметов. Устройство 3 вывода (фиг.1) групп плоских предметов из машины содержит контейнеры 13 (фиг.4) для выгрузки предметов из накопителей 9, механизмы 32 перегрузки (фиг.2-6) групп предметов из контейнеров 13 в конвейер 33 вывода групп предметов из машины и механизмы 34 (фиг.2 и 3) ввода групп предметов во вводное устройство 2 МсШИНЫ. Конвейер 33 для вывода предметов из машины смонтирован в верхней части машины (фиг.1, 2 и 4) и .примыкает к верхнему замкнутому распределительному каналу 21 цилиндрического копира 14. I Механизм 34 ввода групп предметов во вводное устройство 2 машины содержит подвижную платформу 35 (фиг.16 и 17) взаимодействующую как с механизмом 32 перегрузки (фиг. 16 ) так и с механизмом 25 подачи массива 26 плоских предметов в устройство 2 ввода (фиг.17). Подвижная платформа 35 примыкает к нижнему замкнутому распределительному каналу 22 (фиг.8). В случае нескольких цилиндрических блоков 1 (фиг.5), каждый цилиндрический блок снабжается платформой 35, подвижной вдоль присоединяемых цилиндрических блоков. Конструкция описываемой машины предусматривает как сортировку плоских предметов, так и обратный процесс,, когда необходимо получить из отсортированной группы предметов искомый предмет по его отличительным признакам. Эти операции точнее всего определяются термином инвертируемая сортировка, схема которой представлена на фиг.18. Предлагаемая машина работает следующим образом. Все операции по сортировке, поиску и оперативному предъявлению предметов осуществляются при непрерывном вращении приводного барабана 10. Ориентированный массив 26 (фиг. 2 и 4) предметов, подлежащий сортировке, загружается во вводное устройство 2 и механизм 25 подается к сепаратору 27 для отделения из массива по одному предмету. Механизм 28 транспортирования организовывает поток предметов, проходящий перед оптико-электронным считывающим средством 29 читающего автомата 5, где анализируется отличительный признак каждого предмета, например, цифровой индекс, после чего плоский предмет направляется к клапану 30 извлечения искомого предмета из машины. При подаче предмета к клапану 30 возможно одно из двух состояний предмета. Если предмет подлежит направлению в тот или иной накопитель, т.е. режим сортировки, клапан 30 открыт (фиг.9 и плоский предмет парными роликами 36 направляется в коробку 31. для оперативного хранения. Если же читающий автомат 5 обнаружит искомый отличительный признак предмета, клапан через канал 37 будет извлече из потока предметов, и направлен на стол оператора. После чего клапан 30 вновь откроется и группа плоских предметов будет направлена в опреде ленные накопители. В тот момент, когда плоский предмет подводится к коробке 31, также возможно одно из двух состояний предмета. Поскольку машина снабжена несколькими, в данном случае двумя, вводными устройствами, возможно сос тояние, когда в коробке 31, в которой лежит плоский предмет, подходит носитель 12, в котором уже есть предмет из предьщущего вводного уст ройства. В этом случае рычаг 38 челюстного захвата носителя 12 будет закрыт, как показано на фиг.10 пунк тиром, а на фиг.11 сплошной линией. Привод открывания и закрывания рычага 38 осуществляется посредством взаимодействия роликов 39 рычагов 40, фиксируемых в одном из положени пружиной 41. Носитель в этом случае пройдет мимо, в данном случае ниже коробки. В том случае, когда плоский пред мет, находящийся в коробке 31, подлежит захвату носителем 12, его рычаг 38 открыт и проходит в прорези коробки 31, захватывает предмет при помощи отражателя 42 и транспортирует его, освобождая коробку 31 для следующего предмета. Читающий автомат 5 выдает команд управляющему вычислительному компле су 4, который посредством стрелок 17 направляет носитель 12 с предметом в тот или иной распределительны канал 15 к искомому накопителю. При подходе к искомому накопител 9 носитель 12 встречается с упорами накопителя, оставляет предмет в пос леднем и, продолжая движение по дуг окружности, возвращается за следующим предметом.Передвижные управляемые стрелки 17 распределительных каналов 15 мог работать с тактом в несколько раз большим такта распределения (сортировки) предметов, например, при тре поточной системе сортировки, как это показано на фиг.7, такт работы стрелок 17 будет в три раза больше времени рабочего цикла сортировки. Схема движения носителя 12 по распределительным каналам 15 представлена на фиг.8. Для поиска и оперативного предъявления плоского предмета, находящегося в накопителе, достаточно набрать на пульте 7 управления его отличительный признак, например, его цифровой индекс. Управляющий вычислительный комплекс 4 определяет ту группу плоских предметов или тот накопитель, в котором находится искомый предмет, и выдает команду контейнеру 13 и передвижным стрелкам 17, в соответствии с которой контейнер 13 подает по системе распределительных каналов 15 (фиг,8) к искомому накопителю и выгружает из последнего группу плоских предметов с искомьол предметом. Затем, продолжая движение по дуге окружности, контейнер 13 с груплой плоских предметов по системе распределительных каналов 15 посредством управляемых стрелок 17 может выйти на верхний замкнутый канал 21 или на нижний замкнутый канал 22 (фиг.8). При выходе контейнера 13 на верхний замкнутый канал 21 контейнер 13 встречается с перегрузочным устройством 32 (фиг.2-6), которое перегружает группу плоских предметов из контейнера 13 в конвейер 33. Конвейер 33 или выводит всю группу плоских предметов из машины (фиг.З), доставляя, например, всю группу с искомым предметом на стол оператора, или доставляет группу предметов во вводное устройство 2 (фиг.1) для извлечения описанным выше порядком из этой группы искомого предмета. При выходе контейнера 13 на нижний замкнутый канал 22 К9нтейнер 13 встречается с платформой 35, подвижной в радиальном направлении (фиг.2, 3, 16 и 17). При этом группа плоских предметов транспортируки-гим устройством 34 будет непосредственно подана во вводное устройство 2 для извлечения описанным выше порядком из этой группы искомого предмета. Сортировка предметов и обратный процесс получения из отсортированной группы предметов искомого плоского предмета по его отличительным признакам, т.е. инвертируемая сортировка схематично представлена на фиг.18. Основная сортировка плоских предметов из вводного устройства 2 по накопителям 9 показана стрелкой Л. Выгрузка из накопителей в конвейер 33 вывода предметов из машины показана стрелкой М. Стрелка Н показывает вывод группы плоских предметов из машины, а О - ее подачу во вводное устройство. Непосредственная подача группы предметов во вводное устройство (поиск и предъявление искомого предмета) представлены стрелкой П.
Формула изобретения
1.Машина для сортировки и поиска плоских предметов, содержащая цилиндрический корпус, на стенках которого по периферии расположены в несколько ярусов накопители предметов, и устройство для транспортирования предметов, выполненное в виде установлен;ного внутри корпуса поворотного барабана типа беличье колесо, на спицах которого с возможностью перемещения вдоль последних смонтированы предметоносители для транспортирования предметов в накопители, контейнеры для доставки предметов из накопителей и кулачки для выдвижения платформ накопителей при выводе предметов, взаимодействующие посредством модулей селекторов с соответствующим каналом неподвижного цилиндрического копира, а также устройство для ввода предметов в машину, имеющее механизм подачи массива предметов с механизмом сепарации предметов по одному из массива и средством для опознавания отличительного признака каждого предмета, конвейер для вывода предметов из машины и устройства для автоматического управления машиной, отличающаяся тем, что, с целью расширения технологических возможностей машины путем обеспечения инвертируемой, сортировки предметов, машина имеет устройство для перегрузки группы предметов из заданного накопителя в устройство для ввода предметов в мгшину, представляющее собой платформу, смонтированную с возможностью перемещения
в радисшьном направлении от оси машины посредством копирного пальца контактирующего с направляющими и взаимодействующей с одной стороны с контейнером, доставляющим группу предметов из накопителя, а с другой стороны с механизмом подачи предметов к сепаратору устройства для ввода предметов в машину, причем неподвижный цилиндрический копир снабжен дополнительными модулями селекторов и распределительными каналами, замкнутыми по окружности копира в его верхней и нижней частях.
2.Машина по п.1,от ли чаю щ а я с я тем, что устройство для вводапредметов в машину имеет клапан дия извлечения искомых предметов из пфгока на стол оператора.
3.Мсциина по пп. 1 и 2, отличающаяся тем, что устройство для ввода предметов в машину имеет
коробку приема и оперативного хране-, ния предметов, выполненную разрезной с- возможностью прохождения сквозь нее предметоносителя, доставляющего предметы в накопитель.
4.Машина по пп. 1-3, о т л и чающаяся тем, что, с целью
обеспечения надежности т 5анспортирования предметов, каждый предметоноситель выполнен в виде челюстного захвата гшлигаторного типа.
О 5. Маишна пО пп. 1-4, о т л и чающаяся тем, что, с целью обеспечения удобства ремонта и обслуживания маишны, ее цилиндрический корпус выполнен из нескольких секций,
5 подвижных в радиальном направлении, а корпус цилиндрического копира выполнен составным из ряда блоков, поворотных внутрь машины.
6.Машина по пп.1-5, о т л и 0чающаяся тем, что, с целью
упрощения конструкции машины и ее эксплуатации, конвейер для вывода предметов из машины смонтирован в верхней части цилиндрического корпуса машины и примыкает к верхнему замкнутому каналу цилиндрического копира.
7.Машина по пп. 1-6, отличающаяся тем, что, с целью обеспечения увеличения количества
0 накопителей за счет увеличения числа цилиндрических корпусов машины, присоединения их .друг к другу, цилиндрический корпус машины снабжен дополнительной коробкой приема и
5 .оперативного хранения предметов,
взаимодействующей с предметоносителями присоединяемых корпусов, а конвейер для вывода предметов из маши- . ны. также выполнен взаимодействующим
0 с контейнерами присоединяемых корпусов, причем платформа устройства для перегрузки групп предметов из накопителя к устройству для ввода предметов в машину выполнена подвижной вдоль присоединяемых цилиндрических
5 корпусов.
; Источники информации, принятые во внимание при экспертизе 1. Патент Великобритании №964247, кл. В 6 Е, 1964.
0 2. Патент Великобритании №131207, кл. В 6 Е, 1973.
3. Михайлов А.И. и др. Основы информатики. М., Наука, 1968, с. 579582, 583-590.
5 - Авторское свидетельство СССР по заявке №2456915/12, 1977.
5.Патент США №4067459, кл. 214-164, 1978. JO



| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для сортировки плоских предметов | 1975 |
|
SU598663A1 |
| Машина для сортировки плоских предметов | 1975 |
|
SU580017A1 |
| Машина для сортировки плоских предметов | 1982 |
|
SU1049124A1 |
| Устройство для сортировки предметов | 1977 |
|
SU656676A1 |
| Машина для сортировки плоских предметов | 1980 |
|
SU895550A1 |
| Устройство для сортировки разнога-бАРиТНыХ пРЕдМЕТОВ | 1979 |
|
SU814486A1 |
| Машина для набора комплектов печатной корреспонденции | 1990 |
|
SU1747201A1 |
| Подвесной толкающий сортировочныйКОНВЕйЕР для шТучНыХ гРузОВ | 1979 |
|
SU814487A1 |
| ЛИНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТВ ЭКСПЕДИЦИЯХ И ХЛЕБОХРАНИЛИЩАХХЛЕБОЗАВОДОВ | 1972 |
|
SU427688A1 |
| СИСТЕМА ХРАНЕНИЯ СОРТИРОВАННЫХ ОБЪЕКТОВ | 2023 |
|
RU2814861C1 |



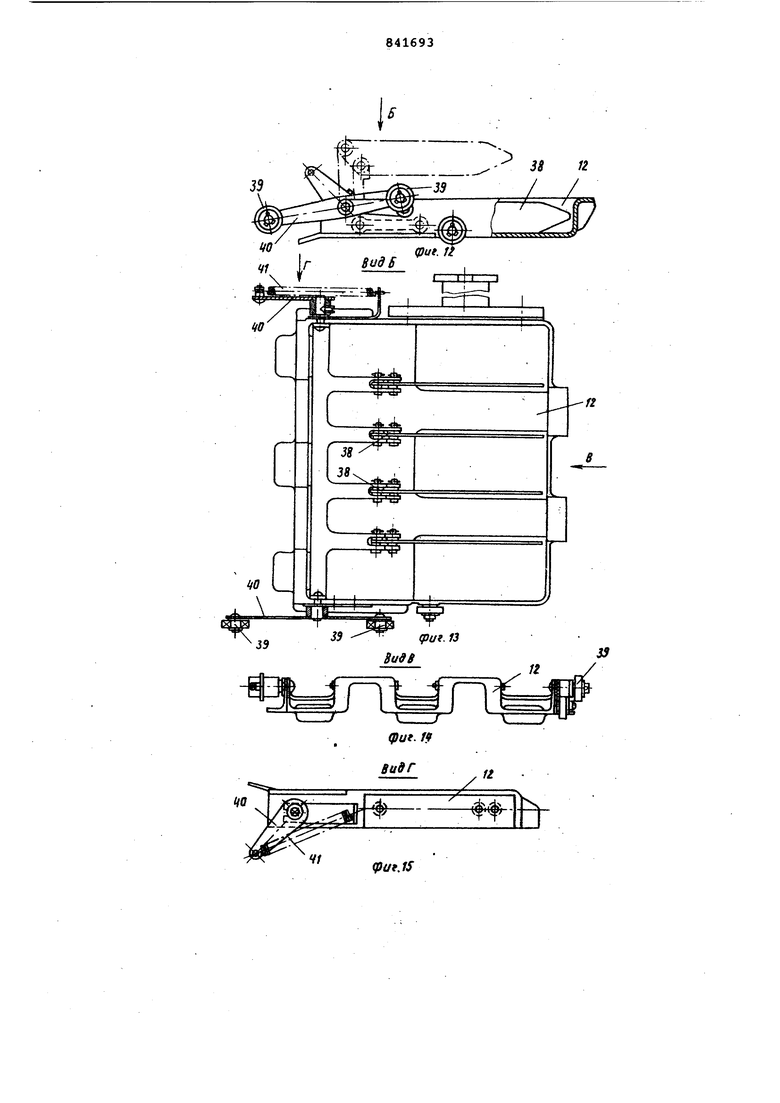
fS
16
/3
21
/7
13
/
r5 9
12
(риг. 10
Вид А
(риг.Э
41 4Q
фи(. 19 Ви9Гf
(put. IS
