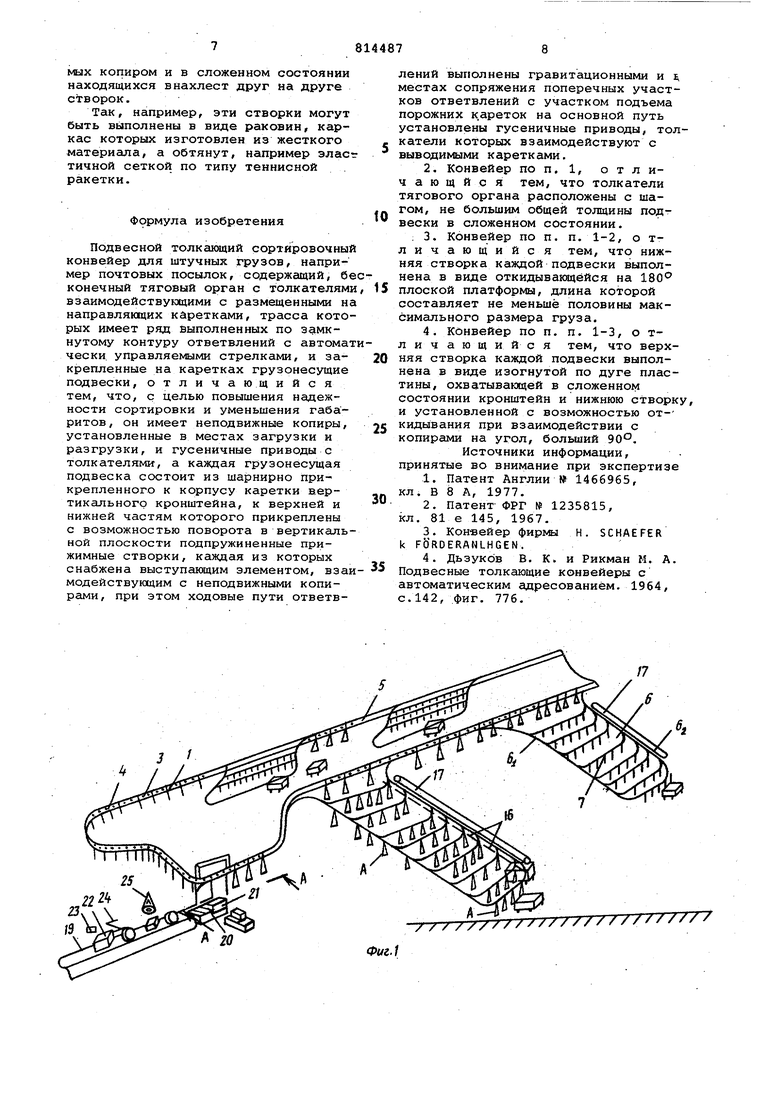
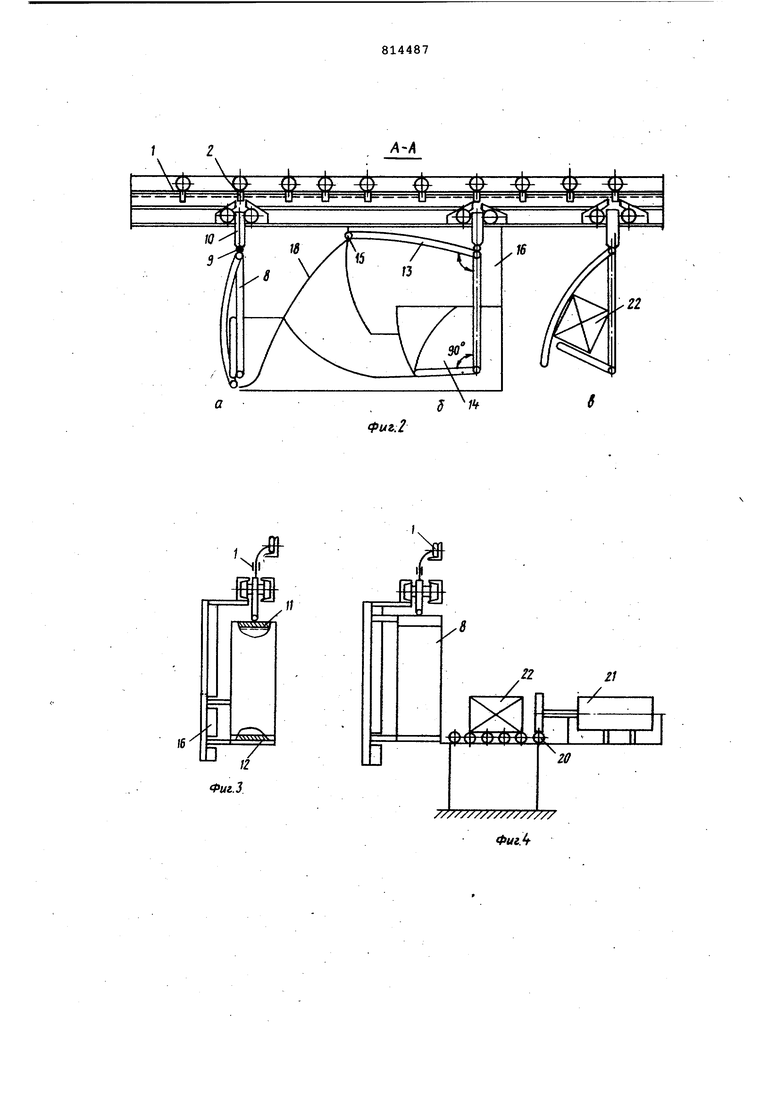
(54) ПОДВЕСНОЙ ТОЛКАЮЩИЙ СОРТИРОВОЧНЫЙ КОНВЕЙЕР ДЛЯ ШТУЧНЫХ ГРУЗОВ ными грузонесущими подвескамк и перемещающимися по ходовым путям, трасса которых имеет ряд выполнен-г ных по замкнутому контуру с поперечными сечениями ответвлений, соответствующих адресам сортировки и обе печивающих посредством автоматически управляемых стрелок и остановов поэ.иционное накапливание кареток с аналогичными адресами 14. Однако этот конвейер не обеспечивает достаточной надежности сортиров ки. Цель изобретения - повьвиение надежности сортировки и уменьшение габаритов конвейера. Поставленная цель достигается тем что конвейер дополнительно имеет неподвижные копиры, установленные в местах загрузки и разгрузки, и гусеничные приводы с толкателями, а каждая грузонесущая подвеска состоит из шарнирно прикрепленного к корпусу каретки вертикального кронштейна, к верхней и нижней частям которого прикреплены с возможностью поворота ,в вертикальной плоскости подпружинен ,ные прижимные створки г каждая из которых снабжена выступающим элементом взаимодействукицим с неподвижными ко. пирами, при этом ходовые пути ответвлений выполнены гравитационными и в местах сопряжения поперечных участков ответвлений с участком подъема порожних кареток на на основной путь установлены гусеничные приводы, толкатели которых взаимодействуют с выводными каретками. Кроме того, толкатели тягового органа расположены с шагом, не большим общей толщины подвески в сложенном состоянии, а нижняя створка кажд .подвески выполнена в виде откидывающейся на 180 гшоской платформы, дли на которой составляет не меньше поло вины максимального размера груза, причем верхняя створка каждой подвес ки выполнена в виде изогнутой по дуг пластины, охватывающей в сложенном состоянии кронштейн и нижнюю створку и установленной с возможностью откидывания при взаимодействии с копирами на угол, больший 90. На фиг. 1 дана общая схема конвейера; на фиг. 2 - разрез А-А на фиг. на фиг. 3 - подвеска в сложенном сос тоянии в момент вхождения ее во взаимодействие с одним из копиров; на фиг. 4 - момент загрузки подвески; на фиг. 5 - момент разгрузки под вески. Предлагаемый конвейер содержит бесконечный тяговый орган с толкателями 2, взаимодействующими с кареткамя 3, снабженными грузонесущими подвесками 4. Каретки 3 перемещаются по ходовым путям 5, траСса которых имеет ряд выполненных по замкнутому контуру ответвлений б с поперечными позиционными участками 7. Каждое ответвление может соответствовать одному из общих направлений сортировки, а позиционные участки 7 более частным адресам сортировки. Ходовые пути 5 основной трассы сопрягаются с путями б, а пути 6 .с путями 7 посредством автоматически управляемых стрелок(на чертеже не показаны, поскольку могут быть любой известный конструкции, так же, как и остановы, передающие устройства на поворотах и т. д). Ходовые пути б и 7 выполнены гравитационными. Пути б имеют два участка: 6 и б2 / первый из которых вводит подвески в ответвление, а второй выводит. Пути 7 имеют уклон в сторону подъемного участка ходовых.путей б2 . Каждая грузонесущая подвеска выполнена в виде вертикального кронштейна 8, прикрепленного посредством шарнира 9 к корпусу 10 каретки 3. Шарнир 9 имеет ограничение для поворота подвески в вертикальной плоскости. К верхней и нижней частям вертикального кронштейна 9 прикреплены посредством пружин 11 и 12 поворотные прижимные створки 13 и 14. Нижняя створка выполнена в виде откидывающейся на вертикальной плоскости платформы, длины которой не меньше половины максимального груза. Пружина 12 должна иметь усилие, достаточное для удержания максимального по весу груза. Верхняя створка 13 выполнена в виде изогнутой по дуге пластины, охватывакщей в сложенном состоянии кронштейн и нижнюю створку. Эта пластина выполнена откидывающейся на угол, больший 90-, Усилие пружины 11 должно быть достаточным для удержания максимального по .весу груза. Каждая из створок снабжена выступающим элементом 15, взаимодействующим в местах загрузки и разгрузки с неподвижными копирами 16. Количество мест загрузки определяется требуемой производительностью конвейера, в местах сопряжения позиционных участков 7 с подъемным участком б2 установлены гусеничные приводы 17 по всей длине подъемного участка, выводящие порожние каретки на пути 5 основной трассы. Копиры 16 имеют направляющие 18, взаимодействующие с элементами 15 створок. В местах загрузки установлено любое и известных подающих транспортных средств 19, например лентоЧный конвейер, и передающее средство 20,например рольганг,а также переталкивакхдее устройство 21 любой из известных конструкций, переталкивающее груз на подвеску 4. Предлагаемый конвейер работает следующим образом.
Грузы 22 подаются на транспортное средство 19. Датчики 23, определяя габариты и вес груза, подают сигнал на сбрасывающий механизм 24, отклоняющий неоптимальные грузы на вспомогательное отводящее средство (на чертеже не показано,и они сортируются вне данного конвейера. Грузы имеющие оптимальные характеристики, следуют к считывающему устройству 25 (в случае работы без оператора. Считывающее устройство передает адрес посылки в систему управления конвейером, которая может быть любо из известных и наиболее экономичных для данного конкретного случая.
В случае работы без оператора адрес посылки может быть нанесен в виде индекса на перекрещивающую посылку бумажную ленту при отправлени посылки в районном отделении связи. Такой индекс может считываться при любом положении посылки на подающем конвейере 19 см. лазерное считывание японской фирмы NEC).
После считывания адреса груз 22попадает на промежуточное средство 20. Здесь грузы находятся до подхода свободной каретки 4 к находящемуся на противоположной стороне тягового органа 1 неподвижному копиру 16. загрузки. Когда подвеска 4 подходит к копиру 16 ее выступающие элементы 15 входят во взаимодействи с направляющими 18, при этом створка 13 открывается на угол, больший , а створка 14 - на угол, равный 90°, принимая горизонтальное положение. В момент, когда подвеска откроется, (фиг. 2 б)срабатьавает усройство 21, сбрасывающее груз на нижнюю створку подвески.
При дальнейшем движении подвески элементы 15 продолжают взаимодействовать с направляющими 18, траектория которых обеспечивает сведение створок, это рведение идет плавно, так как направлякнцие 18 удерживают створки от захлопывания под действием пружин.
Однако взаимодействие с направляющими створок 13 и 14 идет только до сведения на угол максимального по размерам груза.
В случаях, меньших по габаритсцл грузов происходит захлопывание створок, но без повреждения груза поскольку предварительным сведением створки доведены друг к другу на минимсшьное расстояние.
При окончательном выходе подвески из взаимодействия с копиром 16 загрузки груз 22 оказывается зажатым створками 13 и 14, а поскольку усилие пружины 12 больше воздействия на нее груза, то нижняя створка занимает наклонное положение(фиг.2 в
Таким образом, при дальнейшем транспортировании грузов подвеска
занимает минимальное пространство (по ходу движения)при сохранении надежности удержания груза на подвеске. Надежность удержания груза подвеской гарантируется также и верхней створкой подвески.
Рассортированные по позиционным участкам 7 каретки 4 с грузом могут накапливаться на этих участках. Общий уклон путей 6,, и 7 обеспечивает подход груженных кареток к месту
10 стыка путей 7 с участком Gj . В случае больших скоростей движения кареток по этим участкам на них могут быть предусмотрены разнообразные гасители скоростей. С этой
15 же целью каретки могут быть оборудованы амортизаторами.
Последующие к&ретки подходят вплотную к предыдущим на участках 7 накапливания.
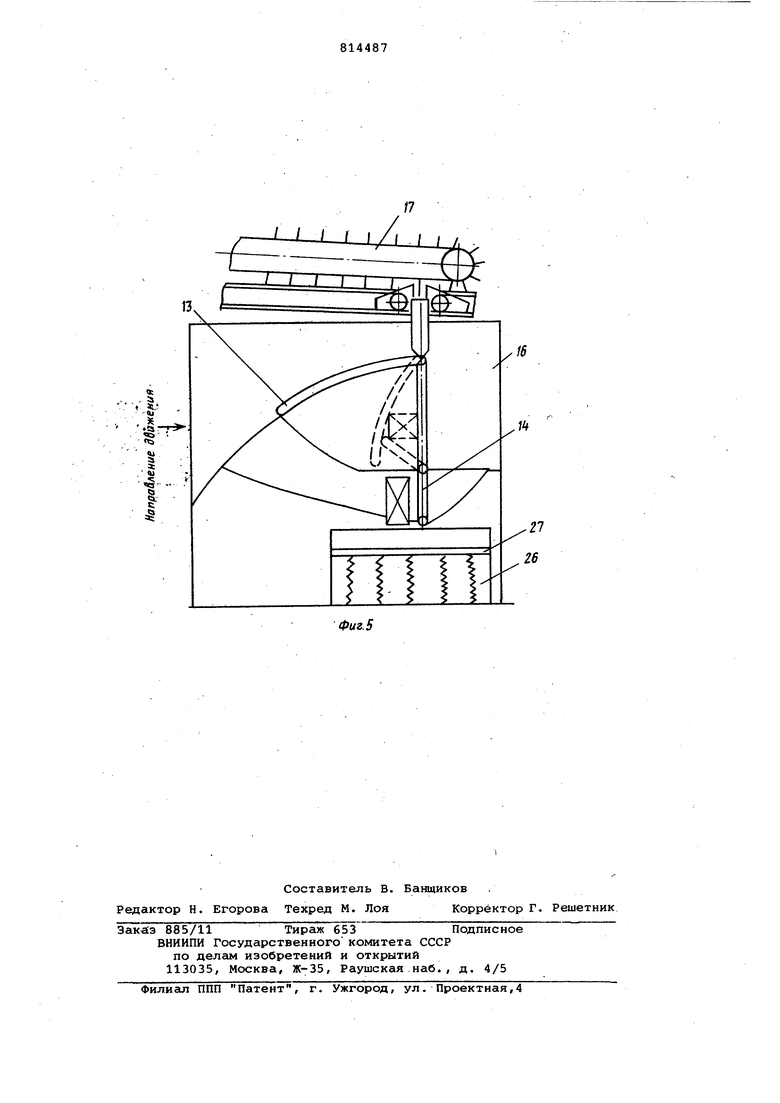
Подлежащая разгрузке каретка от20пускается любым из известныхЧна чертеже не показано)задерживающих ее устройств и попадает под толкатели гусеничного привода 17.
Одновременно с этим выступающие
5 элементы 15 подвески входят во взаимодействие с направляющими 18 копира 16 разгрузки.
Траектория и длина направляющих копира 16 разгрузки обеспечивает
0 разведение створок 13 и 14 (фиг. 51
Верхняя створка 13 отводится на угол больший 90°,. а нижняя створка откидывается на 180 т. е. принимает вертикальное положение. Груз
5 свободно сходит со створки 14. Причем, поскольку открывание нижней створки осуществляется копиром, то оно будет не внезапным, а плавным и груз будет спускаться также плавно, как по лотку. Груз может посту0пать в любое приемное средство, например в конвейер 26., который лучше всего снабдить подпружиненным подъемно-опускным днищем 27.
Захлопывание створок подвески
5 после разгрузки происходит аналогично захлопыванию их .при загрузке, т.е. обязательно по копиру, во избежание резких ударов о груз и друг о друга.
0
Порожние подвески тем же гусеничным приводом 17 подаются на основную трансу 5 конвейера и следуют к месту загрузки.
На участке загрузки, вернее
5 перед загрузкой, порожние каретки могут накапливаться на сравнительно небольших участках, поскольку в сложенном состоянии они занимаиот мало места и могут располагаться вплотную друг к другу.
0
Конструкция створок 13 и 14 псдвесок может меняться в эа.висимости от конкретных особенностей груза, но без изменения ее по существу, т.е; при наличии подпружиненных, приводи5мых копиром и в сложенном состоянии находящихся внахлест друг на друге створок. Так, например, эти створки могут быть выполнены в виде раковин, каркас которых изготовлен из жесткого материала, а обтянут, например элас тичной сеткой по типу теннисной ракетки. Формула изобретения Подвесной толкагаций сортировочны конвейер для штучных грузов, например почтовых посылок, содержащий, б конечный тяговый орган с толкателям взаимодействующими с размещенными н направляющих каретками, трасса кото рых имеет ряд выполненных по здмкнутому контуру ответвлений с автома чески, управляемыми стрелками, и закрепленные на каретках грузонесущие подвески, отличающийся тем, что, с целью повышения надежности сортировки и уменьшения габаритов, он имеет неподвижные копиры, установленные в местах загрузки и разгрузки, и гусеничные приводы с толкателями, а каждая грузонесущая подвеска состоит из шарнирно прикрепленного к корпусу каретки вертикального кронштейна, к верхней и нижней частям которого прикреплены с возможностью поворота в вертикаль ной плоскости подпружиненные прижимные створки, каждая из которых снабжена выступающим элементом, вза модействующим с неподвижными копирами, при этом ходовые пути ответвлений выполнены гравитационными и местах сопряжения поперечных участков ответвлений с участком подъема порожних к.ареток на основной путь установлены гусеничные приводы, толкатели которых взаимодействуют с выводимыми каретками. 2. Конвейер по п. 1, о т л ич а ю щ и с я тем, что толкатели тягового органа распрложены с шагом, не большим общей толщины подвески в сложенном состоянии. : 3. Конвейер по п. п. 1-2, о тличающийся тем, что нижняя створка каждой подвески выполнена в виде откидывающейся на 180 плоской платформы, длина которой составляет не меньше половины максимального размера груза. 4. конвейер по п. п. 1-3, о тличающийся тем, что верхняя створка каждой подвески выполнена в виде изогнутой по дуге пластины, охватывающей в сложенном состоянии кронштейн и нижнюю створку, и установленной с возможностью откидывания при взаимодействии с копирами на угол, больший 90°. Источники информации, принятые во внимание при экспертизе 1.Патент Англии № 1466965, кл. в 8 А, 1977. 2.Патент ФРГ № 1235815, кл. 81 е 145, 1967. 3.Конвейер фирмы Н. SCHAEFER k FORDERANLHGEN. 4.Дьзуков В. К. и Рикман М. А. Подвесные толкающие конвейеры с автоматическим адресованием. 1964, с.142, фиг. 776.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной сортировочный конвейердля шТучНыХ гРузОВ | 1979 |
|
SU804008A1 |
| ВСЕСОЮЗНАЯ 1ШШт-Шш^1щ^^ | 1973 |
|
SU385842A1 |
| Подвеска подвесного грузонесущего конвейера | 1985 |
|
SU1279920A1 |
| Линия погрузки стеклотары в контейнер | 1989 |
|
SU1742175A1 |
| Подвесной конвейер для транспортирования длинномерных грузов | 1971 |
|
SU449857A1 |
| Подвеска подвесного грузонесущего конвейера | 1988 |
|
SU1661089A1 |
| Подвесной грузонесущий конвейер | 1986 |
|
SU1330047A1 |
| ПОДВЕСКА ГРУЗОНЕСУЩЕГО КОНВЕЙЕРА | 1971 |
|
SU426929A1 |
| Подвеска грузонесущего конвейера для изделий с отверстиями | 1977 |
|
SU645907A1 |
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ТЕЛЕГРАФНЫХ БЛАНКОВ | 1971 |
|
SU417348A1 |
L Л
N
X
t6
/
Фиг.З
/
)дзф(
//x/v/////////////
