(54) УСТРОЙСТВО ДЛЯ ТЕЛЕУПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство телеуправления подвижнымОб'ЕКТОМ | 1979 |
|
SU842909A1 |
| Устройство для телеуправления подвижным объектом | 1978 |
|
SU769591A1 |
| УСТРОЙСТВО ДЛЯ ДУПЛЕКСНОЙ связиМЕЖДУ подвижным | 1971 |
|
SU307416A1 |
| Способ телеуправления подвижным объектом | 1979 |
|
SU877595A1 |
| Способ бесконтактного измерения скоростипОдВижНОгО Об'ЕКТА и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1978 |
|
SU823204A1 |
| Устройство для контроля местоположения подвижного объекта | 1983 |
|
SU1124365A1 |
| Устройство для управления транспортным средством | 1975 |
|
SU552632A1 |
| Устройство для управления транспортным средством | 1976 |
|
SU634350A1 |
| Устройство для дистанционного задания маневровых маршрутов с локомотива | 1977 |
|
SU740581A1 |
| Устройство для определения местоположения подвижных объектов с фиксированным путем перемещения | 1977 |
|
SU693423A1 |
Изобретение относится к области телеуправления подвижными объектами и может быть применено на железнодорожном и промышленном транспорте. Известно устройство для управления подвижным объектом, содержащее на контрольном пункте блок задания положения и блок,определения положе ния ,выходы которых соединены со вх дами вычислительного блока, один вы ход которбго подключен ко входу бло ка сравнения, другой выход вычислительного блока и выход блока сравнения подключены iepes блок связи к объекту управления 1. Недостаток указанного устройства состоит в невысокой точности управления объектол . Наиболее близким к изобретеннию по технической сущности и достигаемому эффекту является уст.ройство для телеуправления подтвижным объектом ,содержащее задатчик, блок-реле дистанцинного програ много управления,приемики команд связи и извещения, генератор команд остановки объекта,блок генераторов команд управления, напольный индуктор и индуктор подвижного объекта,, образующие дуплексный канал связи, приемники команд снижения скорости, останйвки и торможения,yiOK генёраторт: в кШ4андйзЪещёнйя, relfeратор команды связи, приемник команд управления, исполнительный узел и объект управления. При этом задатчик подключен к блоку реле дистанционного nporpaNfriHOro у п равленйя, один и второй входы которого подсоединены к выходам приемников команд связи и извещения соответственно, один выход блока реле соединен с генератором команд остановки, а другой - с блоком генераторов команд управления, приемники команд связи и извещения подключены к приемным рамочным кон турам напольных индукторов. Генератор команды остановки и блок генераторов команд управления подсоединены к соответствующим входам передающих рамочных контуров напольных индукторов, приемники команд снижения скорости, остановки торможения и управления соединены со входами исполнительного узла , который соеди- нен с объектом управления . Выходы объекта управления через блок генераторов команд извеще ния и генератор команды связи подключены к передающему рамочному Контуру подвижного объекта-р .
Недостаток этого устройства за- ключается в низком качестве управления из-за невозможности непрерывного контроля и управления режимом движен я и положением механизмов, что не обеспечивает/высокой точности управления.
Цель изобретения - повьшение точности устройства.
Согласно изобретению поставленная цель достигается тем, что в устройство введены два блока сравнения, три преобразователя, блок вычита-
ния, блок дифференцирования и блок выбора направления движения. При этом выход задатчика подключен к первому входу первого блока сравнения, один выход которого соединен с.управлякщим входом задатчика, а другой - со входом блока генераторов команд управления. Другой вход первог6 блока сравнения подключен к выходу первого преобразователя, входы которого соединены с -соответствую-. щйИи приемными рамочными контурами напольного индуктора, приемные рамочные контуры индуктора подвижного объекта подключены ко входам дешифратора и ко входам второго и третьего преобразователей. Выход дешифратора соединен с первым входом блока выбора направления движения и с управЯяйзщйм вхбдом блока вычитания, другие входы которого подключены соответственно к выходам второго и третьего преобразователей. Выход блока вычитания соединен со вторым входом блока выбора направления движения, с первым входом второго блока сравнения, Со feTOP&i входом блока генераторов команд извещения и через блок дифференцирования подключен ко второму входу второго блока сравнения. Выходы блока выбора направления дйижения и второго блока сравнения соединены со входами исполнительного
блока.
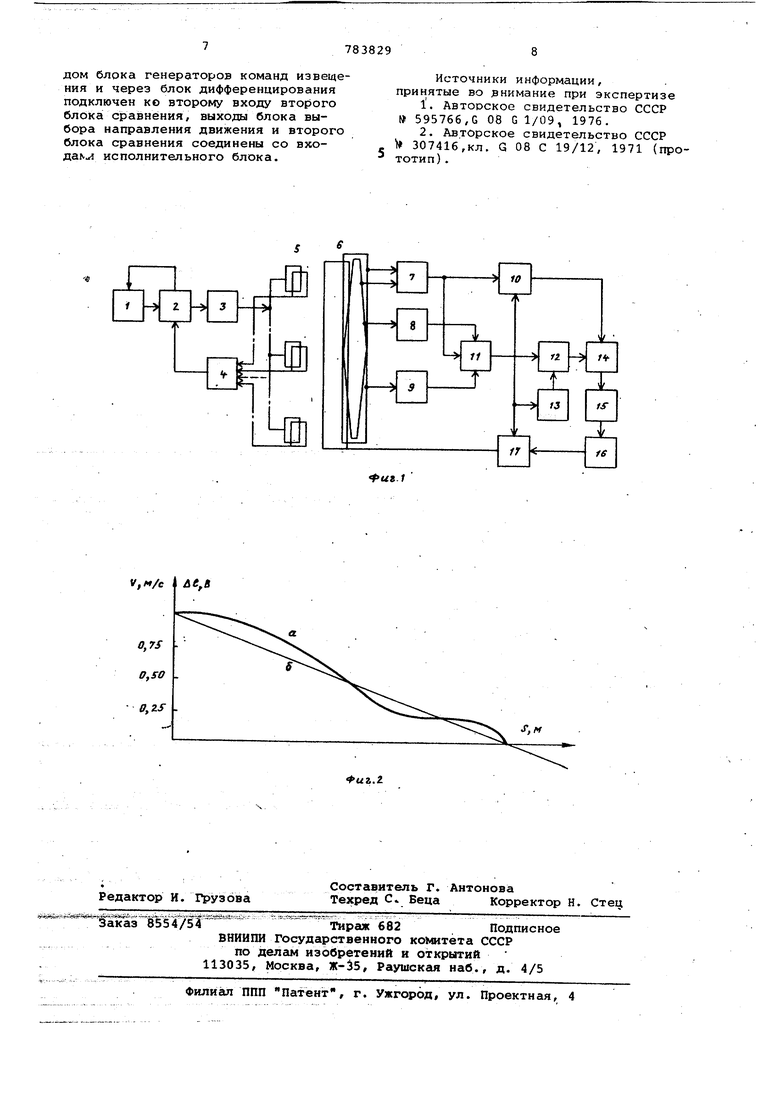
На фиг. 1 представлена блок-схема устройства длятелеуправления-подвижным объектом.. На фиг. 2 изображены: а. - типовой пример графика мгновенных значений действительной скорости подвижного объекта при телеуправлении
б - график статической характеристики изменения разности амплитудных значений сигналов, наводимых в приемные рамочные контуры подвижного объекта при линейном сужении последних от геометрического центра к концам.
Устройство содержит задатчик 1,. выход которого подключен к одному входу блока 2 Сравнения. Один выход блока сравнения соединен с.управляющим входом задатчика, а другой - с блоком 3 генераторов команд управления, другой вход блока сравнения связан с выходом преобразователя 4
частотных сигналов извещения в потенциальные сигналы, йходы которого подключены к. соответствующим приемным рамочным контурам напольного индуктора 5, передающие рамки которых объединены и соединены с выходом блока 3 генераторов команд управления. Приемные рамочные контуры индуктора б подвижного объекта соединены с дешифратором 7, а каждая в отдельности - с преобразователем 8 или 9 частотного сигнала управления в потенциальный сигнал. Выход дешифратора 7 подключен к одному входу блока 10 выбора направления движения и к управляющему в.ходу блока 11 вычитания, другие входы которого подключены к соответствующим выходам преобразователей. Выход блока 11 вычитания соединен, с другим входом блока 10 выбора направления движения, с одним входом блока 12 сравнения и со входом блока 13 дифференцирования, выход которого подключен к другому входу блока 12 сравнения. Выходы блока 10 и блока 12 подключены к исполнительному блоку 14, который соединен с объектом 15 управления. Выход объекта управления подсоединен к датчикам 16 положения механизмов, выходы которых через блок 17 генераторов команд извещения подключен к передающему рамочному контуру подвижного объекта, выход блока 11 соединен со входом блока 17.
Работа устройства заключается следующем.
Датчики 16 положения механизмов подвижного объекта 15 управления ключают соответствующий генератор команд извещения блока17. Частотный сигнал, благодаря индуктивной вязи между передаюгцим и приемным амочными контурами соответственно ндуктора 6 подвижного объекта и напольного индуктора 5, подается на . вход преобразователя 4. Потенциальный сигнал, который характеризует истинное положение механизмов объекта из блока 4, поступает на один вход блока 2 сравнения. Заданное же
значение .положения этого механизма поступает на другой вход блока 2 из задатчика 1. В случае рассогласования включается соответствующий генеатор команд управления блока 3 и через рамочные контуры (передающий контур напольного индуктора 5 и приемный контур индуктора б подвижного. объекта) возбуждает дешифратор 7, который через блок 10 включает исполнительный блок 14 и доводит механизм до требуемого положения. При
этом управление производится до тех пор,пока.не сравняется значение сигналов с преобразователя 4 и задатчика 1. После получения нулевого сигHcina с блока 2 сравнения прекращает-: ;n подача команды управления механизMOM и подается сигнал на управляющий вход эадатчика длявыдачи на блок сравнения задания для следующе.го механизма.
Блок 17 генераторов команд извещения выдает в преобразователь 4 положение всех механизмов объекта, например, циклически с разделением каналов по времени.Поэтому на входы блока 2 сравнения с преобразователя 4 непрерывно и одновременно поступают сигналы об истинном положении механизмов, задатчик 1 выдает последовательно по программе необходимые положения для ка;хдого из механизмов.
Управление передвижением подвижноЛ) объекта и его точную остановку в заданных фиксированных точках (середина индуктЬра 6 находится противсередины одного из напальннх индукто- ров 5) производят следующим образом.
Задатчик 1 выдает сигнал на передвижение объекта. Частотный сигнал с блока 3 поступает на дешифратор 7 и с помощью блока 10 включает передвижение объекта в ту или другую сторону. Положение объекта при его передвижении определяется наличием частотного сигнала с того напольного индуктора, над которым в данный момент времени находится подвижной объект.
При достижении объектом того напольного индуктора, над которым он. должен остановить)ся, из блока 3 выдается команда запуска автономной остановки объекта. При этом из-за определенной конфигурации приемных рамок индуктора 6 на преобразователи 8 и 9 поступают сигналы различной амплитуды. Это достигается таким выполнением рамок, при котором рамки одинаковой длины наложены одна на другую, причем одна половина рамоК, начиная с середины, выполнена умень. шающейся по ширине в обе стороны пе редвижения. .
Сигналы с.блоков 8 и 9 поступают на блок 11 вычитания. Величина разностного сигнала характеризует расстояние между центрами индукторов б и 5, а знак - направление смещения.
Сигнал разности, продифференцированный ho времени в блоке 13, характеризует скорость передвижения. Результирующий сигнал с блока 12 сравнения воздействует на тормозные устройства через исполнительный блок 14.
Величина тормозного воздействия зависит от отклонения скорости передвижения от требуемой при различных расстойниях до места остановки. Управляющим сигналом для передвижения объекта в режиме точной его остановки служит сигнал с дешифратора 7, а направление передвижения при этом определяется знаком разностного сйгн.ала с блока 11 вычитания, поданного на блок 10. Одновременно сигналом с блока 7 открывается блок 11 вычитания через управляющий его вход для;
сравнения сигналов с блоков & и 9 и дальнейшего их преобразования, как было описано.
Управление остановкой объекта прекращается при достижений Нулевого значения разностного сигнала с блока 11 в течение заданного времени воздействием на блок 17, а в конечном счете - и на блок 2 сравнения.
С помощью предлагаемого устройст0ва могут управляться подвижные объек,ты с циклически повторяющимися операциями, например управление по программе грейферным краном.
Использование предложенного устрой5ства позволит повысить точность управления.
Ориентировочный экономический эффект составит около 30 тыс. руб. в год.
0
Формула изобретения
Устройство для телеуправления подвижным объектом, содержащее задат5чик, блок генераторов команд управления, выход которого подключен к передакяцим рамочным контурам напольного индуктора, выход исполнительного блока соединен с объектом управ0ления, к которому подключены входы датчиков положения механизмов, выходы которых подключены к первому .. . входу блока генераторов команд извеЕзения, выход которого соединен с
5 передающим рамочным контуром.индуктора подвижного объекта, отличающееся тем, что, с целью повышения точности устройства, в него введены два блока сравнения, три пре0образователя, блок вычитания, блок дифференцирования и блок выбора напр авления движения, выход задатчик а подключен к первому входу первого блока сравнения, один выход которого соединен с, управляющим входом задат5чика, а другой - со входом блока генераторов команд упраЕления, другой вход первого блока сравнения подключен к выходу первого преобразователя, входы которого соединены с
0 соответствующими приемными рамочными контурами напольного индуктора, приемные рамочные контуры индуктора подвижного объекта подключены ко входам дешифратора и ко входам второ5го и третьего преобразователей, выход дешифратора соединен с первым входом блока выбора направления движения и с управляющим входом блока вычитания, другие входы которого
0 подключены соответственно к выходам второго и третьего преобразователей, выход блока вычитания соединен со вторым входом блока выбора направления движения, с первым входом второ5Гр блока сравнения, со вторым входом блока генераторов команд извещения и через блок дифференцирования подключен ко второму входу второго блока фавнёния, выходы блока выбора направления движения и второго блока сравнения соединены со входa исполнительного блока.
Источники информации, принятые во внимание при экспертизе
307416,кл. G 08 С 19/12, 1971 (прототип) .
Ч, м/с
