(54) УСТРОЙСТВО ДЛЯ ТЕЛЕУПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ
12
Изобретение относится к области телеуправления подвижными объектами и может быть применено на железнодорожном и промышленном транспорте.
Известно устройство для управления подвижным объектом, содержащее на передающем комплекте генератор и индуктор, а на приемном комплекте - приемники и исполнительный узел. Управляющие сигналы в устройстве передают по индуктивному каналу .
Недостатком этого устройства является низ.кое качество управления.
Наиболее близким по технической сущности и достигаемому эффекту к изобретению является устройство для дуплексной связи между подвижным объектом и пунктом управления, содержащее пульт управления, задатчик программы, приемник (дещифратор) команд связи между пультом и объектом управления, дещифратор извещения, генератор команды остановки объекта, блок генератора команд управления механизмами, напольные индукторы, установленные вдоль трассы передвижения, индуктор подвижного объекта, дешифратор команд снижения скорости, дешифратор команд остановки объекта, генератор команд связи пульта и объекта управления, дешифратор команд управления механизмами передвижного объекта, исполнительный узел, под1вил ный объект, датчики положения механизмов подвижного объекта и блок генераторов положения механиз5 МОЕ. Пульт управления соединен с первым входом задатчика программ, второй и третий входы которого подсоединены через дешифраторы связи и извещения с приемными рамками напольных индукторов. Пер10вый и второй выходы задатчика через генераторы команды остановки объекта и блок генераторов команд управления механизмами соединены с соответствующими передающими рамками напольного индук15 тора. Приемные рамки индуктора подвижного объекта через дешифраторы команд снижения скорости, торможения, остановки и управления механизмами подключены к исполнительному узлу, один выход кото20рого подключен к генератору команды связи, а Другой - к генератору известительпых команд, выходы последних подсоединены к передающей рамке подвижного индуктора 2.
25
Недостатком известного устройства является низкое качество управления из-за невозможности осуществления непрерывного контроля и управления режимом дви30жения и положением механизмов, а также
низкая точность остановки подвижного объекта в наперед заданной точке.
Целью изобретения является новышенис точности работы устройства.
Поставленная цель достигается тем, что в устройство для телеуправления подвижным объектом, содержащее пункт управления, оостояш.-ий из пульта управления, выход Которого соединен с первым входом блока зада.нпя программ, блока генераторов и индуктора, и на подвижном объекте - датчики иоложения механизмов, кинематически связанные с иснолнительным блоком, выходы датчиков положения механизмов через блок генераторов положения механизмов соединены с передающей рамкой, нндуктора, дешифратор команд управления, выход которого соединен с первым 1ВХОДОМ исполнительного блочка ;и дешифраторы команд остановки, введены на пункте управления преобразователь и блок сравнения, первый 13ЫХОД которого через блок генераторов соединен с объединенным входом передающих рамо;К пндуктора, приемные рамки которого соединены с соответствуюгцнл-и входами преобразователя, выход преобразователя соединен с первым входом блока сравнения, второй выход и зторой вход которого соединены соответственно со вторым входом и выходом блока зад-.ипя пр;ограмм, на подвижном объекте введены генератор импульсов, элемент задержки и нереключатель, выходы которого соединен. со вторыми входами исполнительного блОКа. Выход ка)кдой нриемной рамки индуктора соединеи с соответствующим входом дешифратора команд управления и входом соответствующих дещифраторов команд остановки. Выход дешифратора команд управления через последовательно соединенные элемент задержки и генератор импульсов соединен с первым входом переключателя, второй и третий входы которого соединены с выходами соответствующих дещифраторов команд остаиовки.
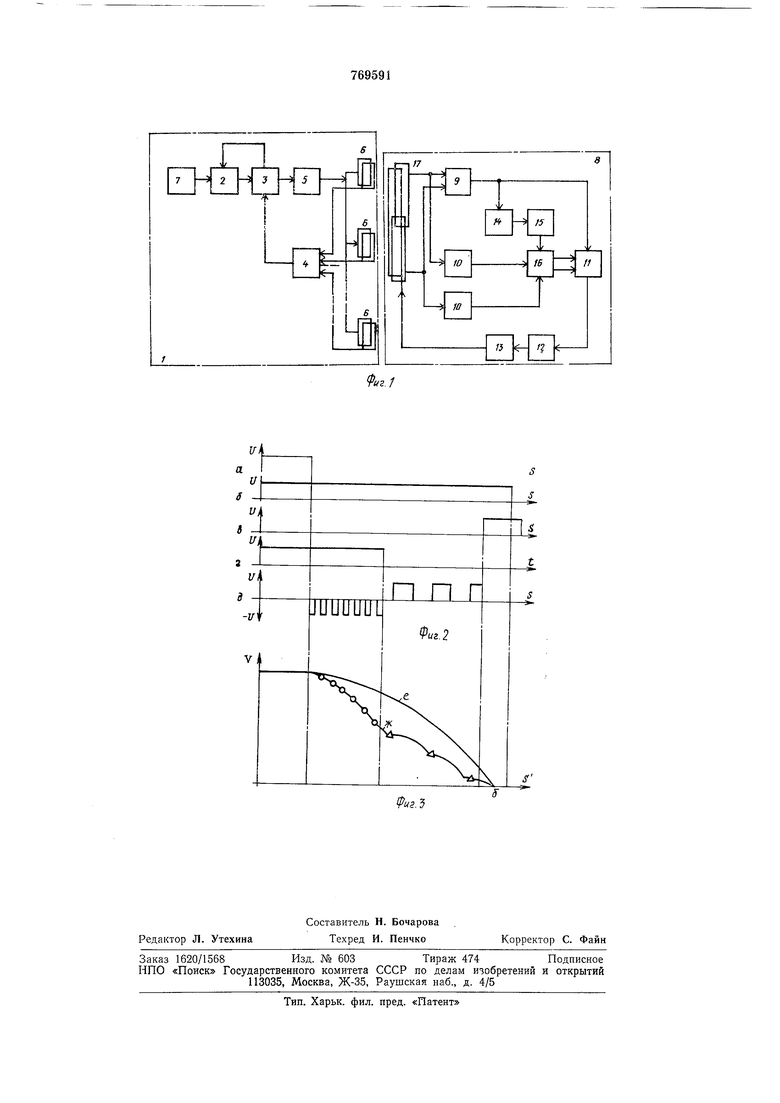
На фиг. 1 представлена функциональная схема устройства для телеуправления подвижным объектом; на фиг. 2 - выходные сигналы с элементов устройства, обеспечивающие , управление подвижным объектом и его механизмами, TaiK и автономную остановку в заданной точке:
а)выходной сигнал с дешифратора команд управления;
б)и в) выходные сигналы с дешифраторов команд обстановки;
г) сигнал с элемента задержки;
,д) выходные сигиалы с переключателя, поступающие на второй (третий) вход исполнительного блок.а.
На фиг. 3 показаны графики изменения скорости в зависимости от местоположения подвижного объекта от места (зоны б) точной остановки:
е) график остановки подвижного объекта;
Ж) рабочий график остановки подвижного объекта, причем знаком «О обозначены точки эффективного торможеиия, а знак «А - точки подталкивающих (доводящих до места остановки) импульсов.
Устройство для телеуправления подвижным объектом содержит на пункте унравления / блок 2 задания программ, блок о сравнения, преобразователь 4, бл,ок 5 генераторов команд управления, индукторы 6 (напольные), блок 7 управления, на подвин ном объекте 8 - дешифратор 9 команд
уиравления, дешифраторы 10 команд остановки, исполнительный блок 11, датчик 12 положения механизмов, блок 13 генераторов иоложения механизмов, элемент 14 задержки, генератор 15 импульсов, переключатель
/6 II индуктор /7.
Устройство работает следующим образом.
С пульта управления 7 запускается блок 2 задания программ, который выдает на
блок 3 сравнения сигналы о заданном положении подвижного объекта и его механизмов. На блок 3 сравнеиия поступают от преобразователя 4 сигналы .истинного положения нодвижного объекта и его механизмов. При этом иоложение механизмов определяется иутем частотного декодирования, а положение транспортного средства - по наличию чзстотного сигнала. Блок сравпения вырабатывает сигнал рассогласования и включает один из генераторов блока 5, частотные сигналы с которого через индукторы 16 н 17 восприиимаются дешифратором 9. Дещифраторы 10 работают лишь в случае получения частотно закодарованной команды остановки. Сигналы с дешифратора 8 команд управления поступают в исполнительный блок //, механически связанный с датчиками 12 положения механизмов. В зависимости от положения
механизмов в каждый конкретный момент времени включаются различные генераторы блока 13 генераторов положения механизмов. Эти сигналы поступают через индуктивный (дуплексный) канал связи на
преобразователь 4. Управление механизмом производится до тех нор, пока истин.ное его положен,ие ,не сравняется с заданным и блок 3 сравнения не выдаст нулевой сингал, который переключает блок 2
задания программ на выдачу задания следующему Механизму или на передвижение подвижного объекта.
Для точной остановки лодвижного объекта 5 носле его подвода к заданному индуктору 6, последний запитывается частотной командой остановки от блока генераторов 5. Под действием этой команды один из дешифраторов 10 (так как приемные рамки подвижного объекта разделены и не
влияют друг на друга вплоть до места их
взаимного перекрытия) через переключатель 16 включает передвижение в ту или иную СторОиу. Например, если подвижный объект 8 подъезжает к; месту остановки справа, то импульсы управления имеют полярность такую, как показано на фиг. 2, д), а если подвижной объект S подъезжает слева, то полярности сигналов - противоположные.
Для более эффективного торможения подвижного объекта 8 переключатель 16, управляемый генератором 15 имнзльсов, открывается на время работы элемента 14 задержки (времени), в течение которого и происходит торможение короткими импульсами противовключения. После прекращения действия сигнала с элемента 14 задержки времени генератор 15 имульсов изменяет как полярность импульсов, так и их длительность. Это открывает переключающую схему для прямого направления движения. Иными словами, производится доводка подвижного объекта В на -пониженной скорости (см. фиг. 3, график 2). Полная остановка подвижного объекта 5 .осущестзляется носле одновременного появления сигнала на дешифраторах 10 комаид остаковки.
Предложенное устройство позволит иовыспть качество управления подвижным объектом в заданных точках остановки. исклЮЧИть влия.ние инерции иодвижиого объекта за счет эффективного торможение: с последующей доводкой объекта к месту остаиовки на пониженной скорости, автомагически различить направление передвижения подвижного объекта, увеличить точность остановки и производительность труда путем уменьшения нормативного времени управления и увеличения скорости перемещения подвижного объекта, а в )яде случаев (например, на блю.минГе) уменьшить тепловые потери в нагревательных печах. Формула изобретения
Устройство для телеуправления -подвижным объектом, содержаш,ее на пункте
уравленпя пульт управления, вьтход которого соединен с первым входом блока задания программ, блок генераторов и индуктор, а на подвижном объекте - датчики положения механизмов, кинематически связанные с исполлительным |блоком, выходы датчиков положения механизмов через блок генераторов положенпя механпзмов соединены с передающей рамкой индуктора, дешифратор команд управления, выход которого соединен е первым входом исполнительного блока, и деш:ифраторы комаид остановки, отличаюш(,ееся тем, что, с пелью повышения точности работы устройства, в него введены иа пункте урравлешш преобразователь и блок сравнения, первый выход которого через блок генераторов соединен с объединенныл входом передающих рамок нндуктора, нриемные рамки которого соединены с соответствующими .входа.ми преобразователя, выход преобразователя соединен с первым входом блока сравиеиия, второй выход и второй вход которого соедпнены соответственно со вторым входом и выходом блока задания программ, на подвижном объекте введены генератор импульсов, элемент задержки и переключатель, выходы которого соединены со вторыми вхолами исиолнительного блока, выход каждой нриемной рамки индуктора соединен с соответствующим ВХОДОМ дешифратора команд управления И входом соответствующих дещ ;фраторов команд остановки, выход дешткфратора команд управления через последовательно соединенные элемент задержки и генератор лвмпульсов соединен с первым входом переключателя, второй и третий входы которого соединены с выходами соответствующих дешифраторов команд остановки.
Источники информации, принятые во внимание при экспертизе:
1. Журнал «Механизация и автоматизация производства, 1974, Хо 6, с. 12-13.
2 Авторское свидетельство СССР Л 307416, кл. G 08 С 19/12, 1970 (ирототип).
F
&
Jl
/7
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство телеуправления подвижнымОб'ЕКТОМ | 1979 |
|
SU842909A1 |
| Устройство для телеуправления подвижным объектом | 1979 |
|
SU783829A1 |
| УСТРОЙСТВО ДЛЯ ДУПЛЕКСНОЙ связиМЕЖДУ подвижным | 1971 |
|
SU307416A1 |
| Способ телеуправления подвижным объектом | 1979 |
|
SU877595A1 |
| Устройство для тревожной сигнализации по проводным линиям связи | 1976 |
|
SU741302A1 |
| Устройство для телеуправления подвижными объектами | 1961 |
|
SU147114A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство для определения местоположения подвижных объектов с фиксированным путем перемещения | 1977 |
|
SU693423A1 |
| Комплексное телемеханическое устройство | 1972 |
|
SU525147A1 |
| Устройство телемеханики | 1978 |
|
SU763944A1 |