1(54) ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электродвигатель | 1979 |
|
SU845235A1 |
| Шаговый электродвигатель | 1980 |
|
SU868941A1 |
| Шаговый электродвигатель | 1987 |
|
SU1713040A1 |
| ОДНОФАЗНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1988 |
|
RU2030068C1 |
| Шаговый электродвигатель | 1979 |
|
SU904140A2 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1988 |
|
RU2030067C1 |
| Однофазный шаговый двигатель ИР-360 | 1985 |
|
SU1718344A1 |
| Шаговый электродвигатель | 1978 |
|
SU782073A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ УНОСИМИГ | 1990 |
|
RU2030078C1 |
| Шаговый электродвигатель | 1980 |
|
SU930516A1 |
1
Изобретение относится к электротехнике, в частности к шаговым электрическим двигателям, которые приобразовывают импульсы электрической энергии в дискретное перемещение вала. Такие двигатели находят широкое применение в автоматических и телеметрических устройствах.
Известны шаговые электродвигатели, срдерхсащие статор с полюсными выступами, постоянными магнитами и обмоткой управления, зубчатый ротор l .
Однако асимметричное расположение полюсных выступов усложняет конструкцию и приводит к увеличению габаритно-весовых показателей двигателей.
Наиболее близким по технической сущности к предлагаемому изобретению является шаговый электродвигатель, содержащий статор с обмоткой управления и магнитопроводом, постоянные магниты и зубчатый ротор, установленный на валу Г2 .
Однако расположение обмотки управления внутри двигателя усложняет технологию его изготовления, а наличие одного ротора ограничивает функциональные возможности двигателя
при необходимости иметь несколько выходных синхронно-вращающихся вгшов.
Цель изобретения - расширения функциональных возможностей двигателя и упрощение технологии его изготовления .
Указанная цель достигается тем, что двигатель снабжен дополнительoными ротором и магнитопроводом и имеет стержень, на концах которого расположено по магнитопроводу, постоянному магниту и ротору, а между ними размещена обмотка управления, причем
5 постоянные магниты выполнены кольцевыми, установлены соосно с валом ротора и имеют одинаковую полярность полюсов, прилегакнцих к стержню.
С целью получения реверсивного
0 вр.ащения роторов двигателя, на его стержне установлена вторая обмотка управления, а между обмотками в средней части стержня размещены третий магнитопровод, третий постоянный маг5 ,нит и третий ротор.
Для уменьшения длины двигателя, стержень двигателя с тремя роторами выполнен изогнутым под прямым углом с центром угла, расположенным на оси
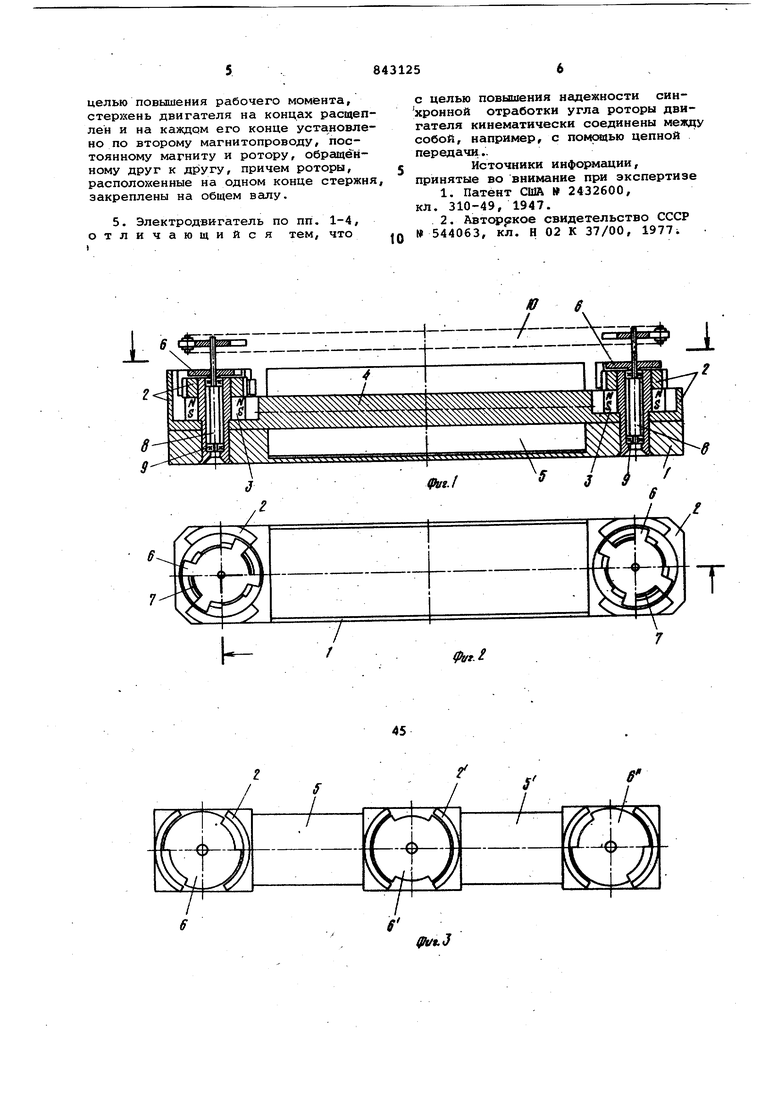
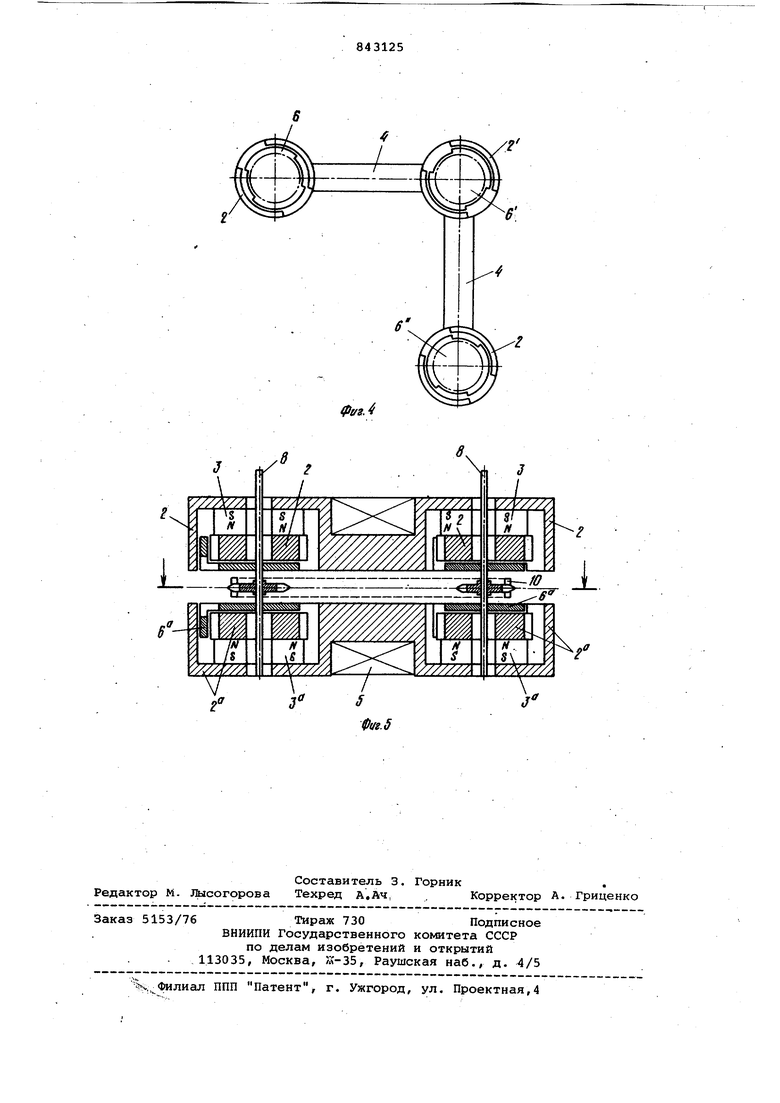
0 вала третьего среднего ротора. С целью повышения рабочего момен двигателя, стержень двигателя на ко цах расщеплен и на каждом его конце установлено по второму магиитопрово постоянному магниту и ротору, обращенному друг к другу, причем роторы расположенные на одном конце стержн закреплены на общем валу. Для повышения надежности синхронной отработки угла роторы двига теля кинематически соединены мей(ду собой, например, с помощью цепной передачи. На фиг. 1 изображен шаговый двигатель, поперечный разрез; на фиг.2 то же, вид сверху; на фиг. 3 и 4 двигатели с тремя роторами, но с различной конфигурацией стрежня дви гателя, вид сверху; на фиг. 5 двигатель с расщепленными концами стержня, поперечный разрез. Двигатель состоит из основания 1 на котором установлены магнитопроводы 2 и постоянные магниты 3. Магнитопроводы 2 соединены стержнем 4, на котором расположена обмотка 5 управления. В воздушном зазоре магнитопровода 2 размещены зубцы роторов б,имеющих магнитную асимметрию благодаря пазам 7. Роторы 6 закреплены на валах 8, установленных в опорах 9. Валы 8 соединены между собой цепной передачей 10. Двигатель может .иметь третий ротор б со своим магнитопроводом 2и постоянным магнитом (не показа а также вторую обмотку 5 управления (фиг.З и 4) . Стержень двигателя может быть вы полнен растепленным (фиг.5). На кон цах такого стержня установлены дополнительные магнитопроводы 2 постоянные магниты 3 и роторы 6. Двигатель работает следующим образом. При подаче импульса тока в обмотку 5 магнитный поток, наведенный током, на одном стержне 4 в воздушн зазоре магнитопровода будет усиливать магнитное поле, в другом ослаблять. Изменение магнитного потока в зазорах магнитопроводов приводит к повороту роторов б, и они занимают положение, соответствующее наибольшей магнитной проводимости при данном распределении магнитного потока в воздушном зазоре. В период отсутствия тока в обмотке 5 роторы б п емещаются под действием магнит ного поля постоянных магнитов 3 и таким образом ротор отрабатывает од шаг. При подаче импульса тока противоположной полярности происходит перераспределение магнитного потока которое приводит к обработке двигателем второго шага. Величина момента и направление вращения роторов зависят от геометрии зубцовой зоны магнитопроводов 2 и роторов б, а также от их взаимного смещения при обесточенной обмотке 5. Установка дополнительной обмотки 5 на стержень 4 позволяет получить попарное реверсивное движение роторов. Так, при подаче разнополярных импульсов в обмотку 5 роторы б и б вращаются в одном направлении, а при подаче разнополярных импульсов в обмотку 5 роторы би б - в противоположном направлении. Направление вращения роторов зависит от их взаимного смещения относительно магнитопроводов 2 при обесточенных обмотках. Наличие кинематической передачи 10, соединяющей все роторы, обеспечивает сохранение одинакового положения роторов друг относительно друга даже при потере шага одним из роторов. Таким образом, предлагаемое изобретение благодаря наличию нескольких роторов существенно расширяет функциональные возможности двигателя, а расположение обмотки управления на стержне, соединяющем магнитопроводы, упрощает технологию его изготовления. Формула изобретения 1.Шаговый электродвигатель,содержащий статор с обмоткой управления и магнитопроводом, постоянные магниты и, зубчатый ротор, установленный на валу, отличающийся тем, что, с целью расширения функциональных возможностей двигателя и упрощения технологии изготовления, двигатель снабжен дополнительными ротором и магнитопроводом и имеет стержень, на концах которого расположено по магнитопроводу, постоянному магниту и ротору, а между ними размещена упомянутая обмотка управления, причем постоянные магниты выполнены кольцевыми, установлены соосно с валом соответствующего ротора и имеют одинаковую полярность, полюсов прилегающих к стержню. 2.Электродвигатель по п.1, отлич.ающийся тем, что, с целью реверсирования на стержне двигателя установлена вторая обмотка управления, а между обмотками в средней части стержня размещены третий магнитопровод, третий постоянный магнит и третий ротор. 3.Электродвигатель по п.2, о тли чающийся тем, что, с целью уменьшения длины двигаггеля стержень двигателя выполнен изогнутым под прямым углом с центром угла, расположенным i оси вала третьего ротора. 4.Электродвигатель по п.1, о тличающийся тем, что, с целью повышения рабочего момента, стержень двигателя на концах расщеп лен и на каждом его конце установле но по второму магнитопроводу, постоянному магниту и ротору, обращё нному друг к другу, причем роторы, расположенные на одном конце стержн закреплены на общем валу. 5. Электродвигатель по пп, 1-4, отличающийся тем, что J «.Ф с целью повышения надежности синхронной отработки угла роторы двигателя кинематически соединены между собой, например, с помощью цепной передачи.. Источники информации, принятые во внимание при экспертизе 1.Патент США If 2432600, кл. 310-49, 1947. 2.Автсфркое свидетельство СССР № 544063, кл. Н 02 К 37/00, 1977; X- - J
Фиг.
f
