(54) ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электродвигатель | 1979 |
|
SU843125A1 |
| Шаговый электродвигатель | 1979 |
|
SU904140A2 |
| Шаговый электродвигатель | 1978 |
|
SU782073A1 |
| Шаговый электродвигатель | 1979 |
|
SU845235A1 |
| Шаговый двигатель | 1979 |
|
SU838939A1 |
| ШАГОВЫЙ ДВИГАТЕЛЬ | 1988 |
|
RU2030069C1 |
| ОДНОФАЗНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1988 |
|
RU2030068C1 |
| Шаговый электродвигатель | 1987 |
|
SU1713040A1 |
| Шаговый электродвигатель | 1987 |
|
SU1826109A1 |
| Однофазный шаговый электродвигатель | 1985 |
|
SU1367109A1 |
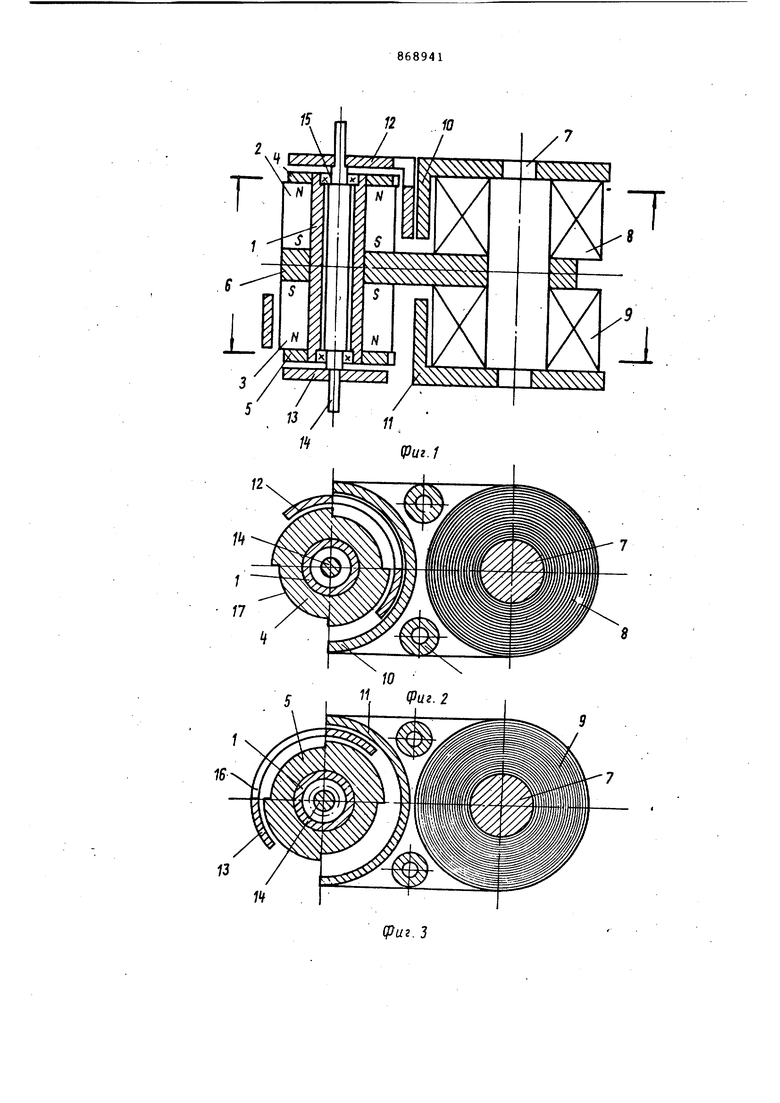
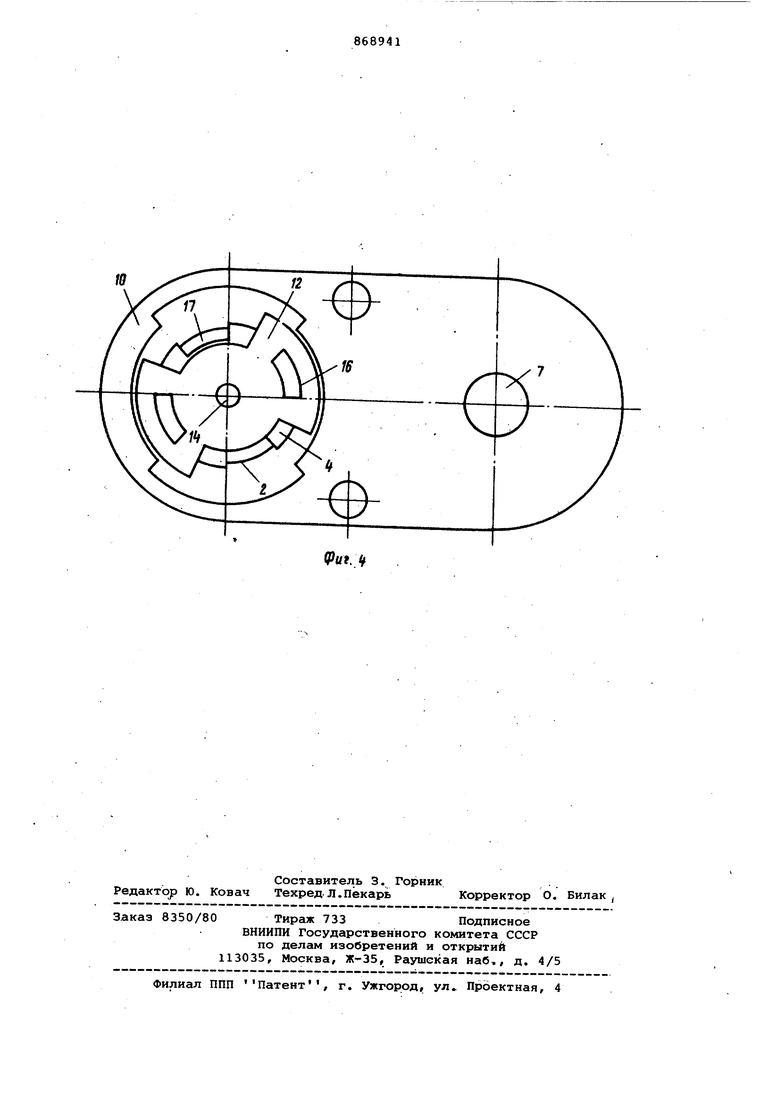
Изобретение относится к электротехнике, в частности к шаговым электродвигателям, которые находят широкое применение в дискретном электроприводе. Известны шаговые двигатели со статором, имеющем постоянные магниты, магнитопроводы, соединяющий их стержень с обмоткой управления и зубчатые роторы, установленные на валах Ij Недостатком этих двигателей является конструктивная разобщенность валов, на которых установлены роторы Наиболее близким по технической сущности к предлагаемому является шаговый электродвигатель, содержащий статор, снабженный двумя полыми цилиндрическими встречно намагниченными постоянными магнитами с магнитопроводами и стержнем с обмоткой управлени и два зубчатых ротора, установленных на концах общего вала, размещенного внутри постоянных магнитов 2. Однако в силу разомкнутости магнитной цепи обмотки управления указанны.й двигатель не может иметь высоких энергетических показателей. Кроме того, он имеет значительную осевую длину, так как ось стержня. на которой установлена обмотка управления, совпадает с осью вала. Цель изобретения - повышение энергетических показателей двигателя и уменьшение его осевой длины. Указанная цель достигается тем, что в двигателе стержень с обмоткой управления расположен параллельно валу и в своей средней гг рпинен магнитной пере1«ичкой с встречно направленнЕЛми полюсами постоянных магнитов, причем обмотка управления выполнена из двух согласно.включенных катушек, расположенных по обе стороны перемычки на стержне, который на каждом своем конце снабжен полюсом, обращенным к ближайшему ротору. На фиг. 1 представлен предлагаемый двигатель, продольный разрез; на фиг. 2 и 3 - сечения по плоскостям,указанными на фиг.1; на фиг.4 двигатель с полюсом стержня, полностью охватывающим ротор, вид сверху. Двигатель содержит статор, в который входят немагнитная втулка I, постоянные магниты 2 и 3 с полюсными наконечниками 4 и 5, магнитная перемычка 6, соединяющая постоянные магниты 2 и 3 со стержнем 7. На стержне 7 установлены согласно включенные катушки 8 и 9 обмотки управления.
На концах стержня установлены полюса 10 и 11, обращенные к зубчатым роторам 12 и 13 соответственно. Полюса 10 и 11 могут полностью охватывать ротора (фиг. 4.
Роторы 12 и 13 установлены на общем валу 14 с взаимным разворотом на половину зубцового деления.
ВсШ 14 закреплен во втулке 1с помощью подшипников 15. Для обеспече,ния момента фиксации ротора в магнитной цепи двигателя предусмотрена
асимметрия за счет пазов 16 на ротор и пазов 17 на полюсных наконечниках 4 и 5.
Двигатель работает следующим образом.
При подаче импульса тока в обмот ку управления магнитный поток в воздушном зазоре одного из полюсов, например полюса 10, стержня 7 ослабляется , а в воздушном зазоре другого полюса стержня 7 (в данном случае полюса 11) магнитный поток усиливается. Вал 14 роторов 12 и 13 стремится занять такое положение, при котором зубец ротора 13 встанет против полюса 11, где магнитный поток в воздушном зазоре больше, так как на вал ротора действует активный момент. При отсутствии тока в обмотке ротор сместится из этого положения под действием реактивного момента, обусловленного асимметрией магнитной цепи за счет пазов .16 и 17.
Изменение полярности импульса тока в юбмотке управления приводит, к тому, что больший магнитный поток будет в зазоре другого полюса, т.е. полюса 10, и под действием указанного выше активного момента вал ротора повернется так, чтобы зубец ротора 12 занял положение напротив этого полюса, т.е. вал ротора совер шит поворот на угол JT .
Последовательная подача разнополярных импульсов обеспечивает дискретное перемещение вала с указанным шагом.
Направление вращения ротора одностороннее и определяется взаимным положением пазов 16 и 17.
Таким образом, размещение стержня 7 параллельно валу 14 и наличие полюсов 10 и 11 существенно повышают эффективность магнитной цепи обмотки управления и сокращают осевую длину двигателя, что выгодно отличает его от известных шаговых электродвигателей.
Формула изобретения
Шаговый электродвигатель,содержаищй статор,снабженный двумя полыми цилиндрическими встречно намагниченми постоянными магнитами с магнитопроводами и стержнем с обмоткой управления, и два зубчатых ротора,установленных на концах общего вала, рамещенного внутри постоянных магнитов, отличающийся тем, ,что, с целью повышения энергентических показателей двигателя и уменьшения его осевой длины, стержень с обмоткой управления расположен параллель ю валу и в своей средней части соединен магнитной перемычкой с встречно направленными полюсами постоянных магнитов, причем обмотка управления выполнена из двух согласно включенных катушек, расположенных по обе стороны перемычек на стержне, который на каждом своем конце снабжен полюсом, обращенным к ближайшему ротору.
Источники информации, принятые во внимание при экспертизе
кл. Н 02 К 37/00, 1979.
кл. Н 02 К 37/00, 1979 (прототип).
.N
/
- /
If
12
Ih
13
1t
x,
S
т
$
О
CS
(Pui.f
(риг. J
(put. 1
