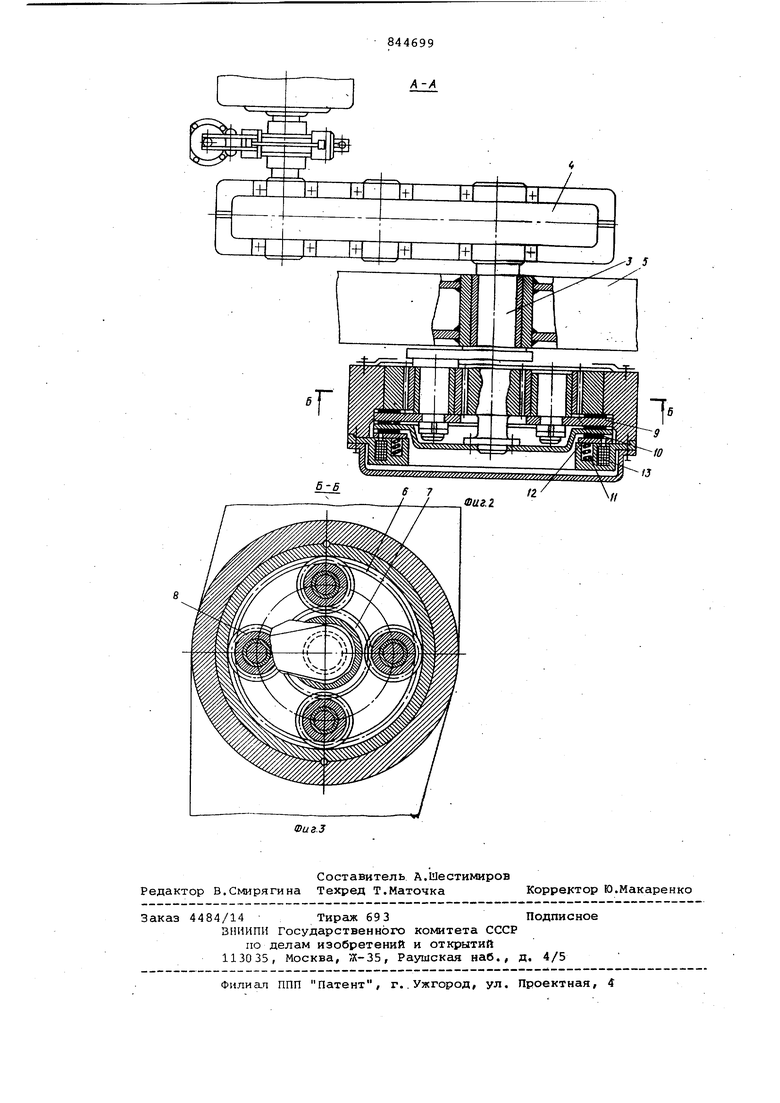
Изобретение относится к ходовому оборудованию тяжелых мгиаин, например землеройных. Известен механизм шагания экскаватора, включакяций раму, привод и xprfвошипно-эксцентриковый механизм flj. Недостаток известного механизма заключается в том, что он не позволяет, раз грузить кривошип от поперечных усилий при изменении направления движения машины, не оборудованной специалыйлм механизмом поворота. Известен механизм шагания мощных экскаваторов и других тяжелых машин, включакщий опорные лыжи, ноги, patty, привод, кривсялипы и планетарные редукторы с зубчатыми венцами, сателлита ли и. центральными шестернями 2. { Однако такой механизм не позволяет регулировать величину шага передви жения машины. Целью изобретения является обеспечение возможности регулирования величины шагания машины. поставленная цель достигается тем что зубчатые венцы неподвижно закреплены в расточках,выполненных в ногах а валы сателлитов соединены с кривошипами , а центральные шестерни снабжены тормозами, неподвижно установленными в расточках ног.; На фиг. 1 изображен механизм, вид сбокуi на фиг. 2 - сечение А-А фиг. 1; на фиг. 3 - сечение В-Б фиг. 2. Механизм шагания включает опорные лыжи 1, ноги 2, кривошипные валы 3, являющиеся выходньп ш валами приводов 4, и планетарные редукторы, смонтированные в расточках ног 2. Привода 4 установлены на общей раме 5. Планетарный редуктор образуется колесом б, жестко посаженным в расточке ноги, центральной шестерней 7 и сателлитами 8, соединенными разгрузочным диском 9. Врдилом планетарногр редуктора является кривстыипный вал 3 привода 4. На валу центральной шестерни 7 установлен тормознойдиск 10,-постоянно прижимаемый к разгрузочному диску 9 сателлитов 8 пружинами, 11 через нажимное кольцо 12. На внешнем-, торце центрального стакана ноги 2 установлен блок с электромагнитами 13, связанных сердечниками с нажимным кольцом 12. Нажимное кольцо 12 установлено в расточке ноги 2 на шлицах. Механизм работает в двух режимах: центральная шестерня 7 заторможена или расторможена. При заторможенной центральной шестерне 7 движение передается от приводов 4 Через кривошипные валы 3 на сателлиты 8. Колесо 6 является неподвижным относительно расточки ноги 2 поэтому кривошипныевалы 3 вращаются относительно неподвижной оси сателлитов 8, при этом происходит шагание мгинины на полный шаг. Торможение центральной шестерни осуществля ется пружинами 11 за счет зажатия тор мозного диска 10 между разгрузочным диском 9 и нажимным кольцс л 12. При расторможенной центральной шес терне 7 движение передается от приводов 4 через 1фивошипные валы 3 на сателлиты 8, которые вращают центральную шестерню 7, обкатываясь вокруг нее. Шагание при этом не происходит. Разкыкание тормоза осуществляется электромагнитами 13, притягивающими к себе нажимное кольцо 12. Различная величина шагания осущест вляется сочетанием обоих режимов рабо ты: перемещение лыж, начина1ется при заторможенной центральной шестерне 7, затем при достижении необходимого перемещения замлкается цепь электромагнитов 13, центральная шестерня 7 освобождается, и лыжи машины опускаются на грунт. Регулирование шага передвижения достигается изменением времени работы с заторможенной шестерней 7, например, ее затормаживанием на определенной фазе шагания. Формула изобретения 1.Механизм шагания тяжелых машин, включающий лыжи, ноги, раму, привод, кривошипы и планетарные редукторял с зубчатыми венцами, сателлитами.установленными на вапах и центральными шестернями, отличающийся тем, что, с целью обеспечения возможности регулирования величины шагания машины, зубчатые венцы неподвижно закреплены в расточках, выполненных в ногах, а валы сателлитов соединены с кривоаипами. 2.Механизм шагания по п. 1, о т л и ч а ю щ и и с я тем, что центральные шестерни снабжены тормозами, неподвижно установленными в расточках ног. Источники инфорглации, принятые во внимание при экспертизе 1.Домбровский Н.Г. и Панкратов С.А. Землеройные машины. М. Госстройиздат, 1961, с. 291-292. 2. Авторское свидетельство СССР 217280, кл. Е 02 F 9/04, 1967.

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания | 1975 |
|
SU947306A1 |
| МЕХАНИЗМ НАТЯЖЕНИЯ ГУСЕНИЦЫ С ЭЛЕКТРОПРИВОДОМ | 2011 |
|
RU2464198C1 |
| ГИДРОМОТОР-КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2038226C1 |
| ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ КРУТЯЩЕГО МОМЕНТА | 1993 |
|
RU2086834C1 |
| Рабочий орган землеройной машины | 1977 |
|
SU672297A1 |
| МЕХАНИЗМ ПРИВОДА НАСОСА | 1992 |
|
RU2035616C1 |
| МУФТА-ТОРМОЗ | 1970 |
|
SU284526A1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| Предохранительное устройство | 1982 |
|
SU1106898A1 |
| Планетарный редуктор | 1990 |
|
SU1754988A1 |